Page Under Contruction
Page Under Construction
Page Under Construction
January 23, 2013 “Controls, Robotics & Automation”, POSCO, Pohang, South Korea January 23, 2013 “Innovation & Entrepreneurship”, POSCO, Pohang, South Korea January 22, 2013 “Controls, Robotics & Automation”, Ishikawajima-Harima Heavy Industries Co., Ltd (IHI), Tokyo, Japan January 22, 2013 “Innovation & Entrepreneurship”, Ishikawajima-Harima Heavy Industries Co., Ltd (IHI), Tokyo, Japan January 21, 2013 “Controls, Robotics … Invited Presentations
Projects in the robotics category: [easyrotator align=”left”]erc_88_1377105406[/easyrotator] Biomimetic locomotion is of interest in applications where good cruising speeds, high maneuverability and stealth are needed. Current Biomimetic devices that use traditional discrete-stiff mechanisms have severe limitations because of their complexity. The proposed approach exploits the natural dynamics of a flexible structure in order to achieve the … Biomimetic locomotion in liquid environments
Projects in the robotics category: [easyrotator align=”left”]erc_88_1377105406[/easyrotator] [slideshow_deploy id=’174′] Liquid natural gas and liquid petroleum gas are stored in steel alloy tanks at approximately -160C and -45C, respectively. These tanks need to be periodically inspected for cracks, corrosion, and other defects. Currently the inspection process involves sending a human into the emptied tanks with inspection … Thermal Control of Robot in Cold and Hazardous Environment
D. Chatzigeorgiou, K. Youcef-Toumi and R. Ben-Mansour, “Identification & Estimation Algorithms for In-Pipe Leak Detection ,” American Control Conference, 2014 Chatzigeorgiou D., Youcef-Toumi K. and Ben-Mansour R., “Modeling and Analysis of an In-Pipe Robotic Leak Detector,” IEEE International Conference on Robotics and Automation, 2014 Video Submission : Chatzigeorgiou D., Wu Y., Youcef-Toumi K. and Ben-Mansour … Selected Conference Proceedings
F.W. Paul and K. Youcef-Toumi, Editors, Robotics: Theory and Applications, ASME Book DSC-. Vol. 3, 1986. ISBN: 978-9997866127. Paul, F.W. and K. Youcef-Toumi, Editors, Robotics: Theory and Applications, Sym- posium Volume of the Winter Annual Meeting of the American Society of Mechan- ical Engineers, December 1986. Asada, H. and K. Youcef-Toumi, Direct-Drive Robots: Theory and Practice, … Books
D. Chatzigeorgiou, K. Youcef-Toumi and R. Ben-Mansour, “MIT Leak Detector: Modeling & Analysis towards Leak-Observability,” IEEE/ASME Transactions on Mechatronics, 2014 (under review) D. Wu, K. Youcef-Toumi, D. Chatzigeorgiou, S. Mekid, and R. Ben-Mansour , “Channel-Aware Relay Node Placement in Wireless Sensor Networks for Pipeline Inspection”, IEEE Transactions on Wireless Communications, 2014 D. Chatzigeorgiou, K. Youcef-Toumi and … Selected Journal Papers
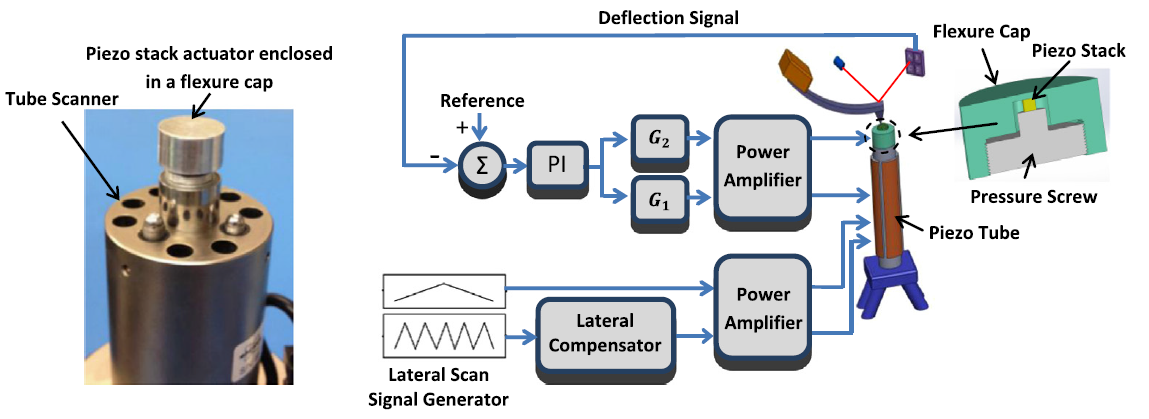
Atomic force microscope(AFM) is a powerful and versatile instrument with a wide variety of applications ranging from imaging and nano-manipulation to characterizing mechanical properties of various types of samples. The speed limitations of this device however, have constrained its capabilities. In this research we develop controls, instrumentation and signal processing techniques to achieve ultra-high imaging … High-Speed Large-Range Atomic Force Microscopy
Other projects in the robotics category: [easyrotator align=”left”]erc_88_1377105406[/easyrotator]
Projects in the robotics category: [easyrotator align=”left”]erc_88_1377105406[/easyrotator] Project Overview Leakage is the major factor for unaccounted losses in every pipe network around the world (oil, gas, or water). In most cases, the deleterious effects associated with the occurrence of leaks may present serious economical and health problems. Therefore, leaks must be quickly detected, located, … In Pipe Leak Detection