Hydrogel
Regular robot in a pipe that it fits Comparison between the regular robot and hydrogel coated robot in smaller pipes
Regular robot in a pipe that it fits Comparison between the regular robot and hydrogel coated robot in smaller pipes
Projects in the robotics category: [easyrotator align=”left”]erc_88_1377105406[/easyrotator] [slideshow_deploy id=’290′]
Projects in the robotics category: [easyrotator align=”left”]erc_88_1377105406[/easyrotator] [slideshow_deploy id=’174′] Liquid natural gas and liquid petroleum gas are stored in steel alloy tanks at approximately -160C and -45C, respectively. These tanks need to be periodically inspected for cracks, corrosion, and other defects. Currently the inspection process involves sending a human into the emptied tanks with inspection … Thermal Control of Robot in Cold and Hazardous Environment
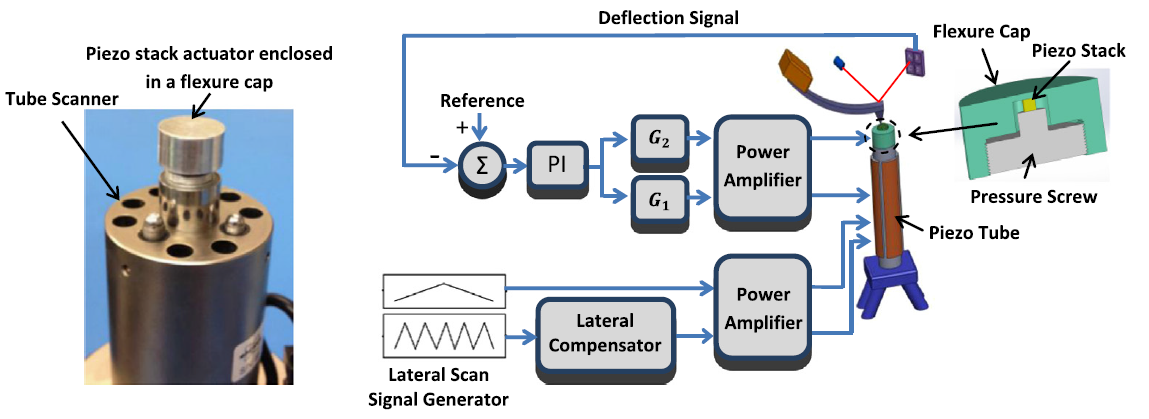
Atomic force microscope(AFM) is a powerful and versatile instrument with a wide variety of applications ranging from imaging and nano-manipulation to characterizing mechanical properties of various types of samples. The speed limitations of this device however, have constrained its capabilities. In this research we develop controls, instrumentation and signal processing techniques to achieve ultra-high imaging … High-Speed Large-Range Atomic Force Microscopy