The mainstream control strategies in the application of Interior Permanent Magnet Synchronous Motor (IPMSM) control are Vector Control (VC) and Direct Torque Control (DTC). Advances in motor drive strategy have allowed engineers to achieve unprecedented gains in the dynamic response, steady accuracy, and parameter robustness in power electronic converters. Although these methods have proven to be very successful, there are a few well-known shortcomings of these methods:
1) The quality of calibrations of PI regulator parameters and MTPA (Maximum Torque Per Ampere)map heavily depends on the experience of the operator;
2) The accuracy of parameters of IPMSM deeply affect the robustness of control system;
3) Dynamic response speed and steady accuracy of the control system are not satisfied in certain applications for instance, the active damping of torque ripples for a hybrid power system.
To address these challenges, machine learning-based control theory is recognized as one promising solution to enabling devices that can operate at self-learning and less calibration resulting in smarter and more efficient performance. This project aims to study the intelligent IPMSM control technologies by leveraging recent advances in online and/or reinforcement machine learning methods to achieve an adaptive, robust and intelligent control strategy.
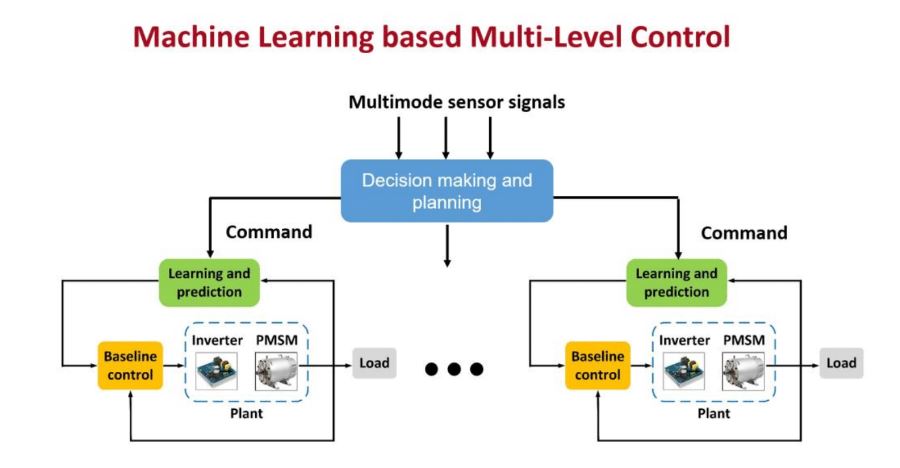
The control framework proposed for this project, as depicted above, consists of three levels. The baseline controllers are responsible for dealing with internal model uncertainties and external disturbances. On top of that, learning and prediction level control aims to further optimize the performance indexes of the plant. While decision-making and planning level takes multimode sensor signals as input and generates proper commands to modules operated in parallel. Our aim is to develop a computationally and experimentally validated intelligent embedded MCUprototype. The proposed control approach and system has the potential to be applied for various motor control scenarios in a wide range of industrial areas such as the emerging electric vehicle industry