Projects in the robotics category:
[easyrotator align=”left”]erc_88_1377105406[/easyrotator]
Robot Design
A tetherless robot is developed for maneuvering inside 4-inch-diameter (10 cm) pipe networks. This ellipsoidal micro drone is capable of path following and making very tight turns. It will be used to carry leak sensors into water distribution networks and perform high speed, full coverage leak detection in every branch of the pipes.
Published in IROS 2015 paper
Swimming speed and turning radius are important measures of robot maneuverability. A test run in the open water shows that the robot is very good at maneuvering in water. It can swim easily at 1.3 ft/s (0.4m/s or about 5 body length/s) and turns at a 0.6 inch radius of curvature (1.5 cm or less than 0.2 body length).
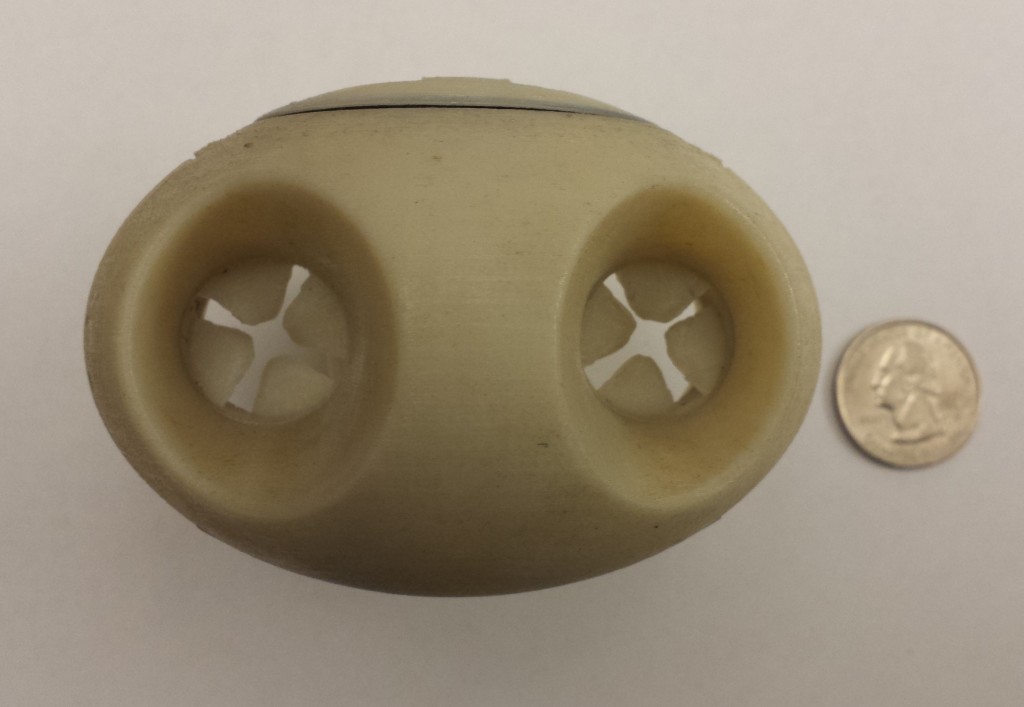
RIM Propeller
The robot is actuated by a pair of RIM driven propellers. It is a brushless DC motor with its rotor replaced by a hubless propeller. Each motor-propeller assembly is measured to be 1.3 inch (33mm) in diameter and less than 0.5 inch (12mm) in thickness. This compact actuator is able to generate 0.4N of thrust given a 7.4V, 1A power supply.
Published in DSCC 2014 paper
