@inproceedings{MRL_AFM_Nanopositioning_Stage_Stacked,
title = {Design and Control of a Multi-Actuated Nanopositioning Stage with Stacked Structure},
author = {C Yang and F Xia and Y Wang and S Truncale and K Youcef-Toumi},
doi = {10.23919/ACC.2019.8815299},
issn = {2378-5861},
year = {2019},
date = {2019-07-12},
booktitle = {2019 American Control Conference (ACC)},
journal = {xplore},
pages = {3782-3788},
publisher = {IEEE},
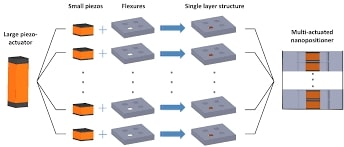
abstract = {A novel multi-actuated nanopositioning stage with stacked structure has been developed. The aim is to achieve both high bandwidth and large motion range. Symmetric flexures are designed to obtain equal stiffness along any direction in the lateral plane. With this design, the lateral stiffness and corresponding bending mode resonance frequency can be optimized. Both analytical model and finite element analysis are employed to predict the dominant resonance frequency. Experimental results indicate that the dominant resonance of nanopositioner is at 28.2 kHz, with a motion range of 16.5J.1m. A disturbance-observer-based controller is implemented to suppress the hysteretic nonlinearity. The new design and control system enable high-bandwidth and high-precision nanopositioning up to 2 kHz.},
keywords = {Control Theory, Direct-drive robots for laser cutting manufacturing, Fabrication, Instrumentation, Mechatronic Design, Robotics & Automation},
pubstate = {published},
tppubtype = {inproceedings}
}