
Mechatronics Research Lab Publications
List still being populated due to webpage maintenance
2021
Fangzhou Xia; James Quigley; Xiaotong Zhang; Chen Yang; Yi Wang; Kamal Youcef-Toumi
A modular low-cost atomic force microscope for precision mechatronics education Journal Article
In: Mechatronics, vol. 76, pp. 102550, 2021, ISSN: 0957-4158.
Abstract | Links | BibTeX | Tags: Experimentation, Fabrication, Instrumentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling
@article{MRL_AFM_Low_cost_AFM,
title = {A modular low-cost atomic force microscope for precision mechatronics education},
author = {Fangzhou Xia and James Quigley and Xiaotong Zhang and Chen Yang and Yi Wang and Kamal Youcef-Toumi},
url = {https://www.sciencedirect.com/science/article/pii/S0957415821000441},
doi = {https://doi.org/10.1016/j.mechatronics.2021.102550},
issn = {0957-4158},
year = {2021},
date = {2021-04-15},
journal = {Mechatronics},
volume = {76},
pages = {102550},
publisher = {ScienceDirect},
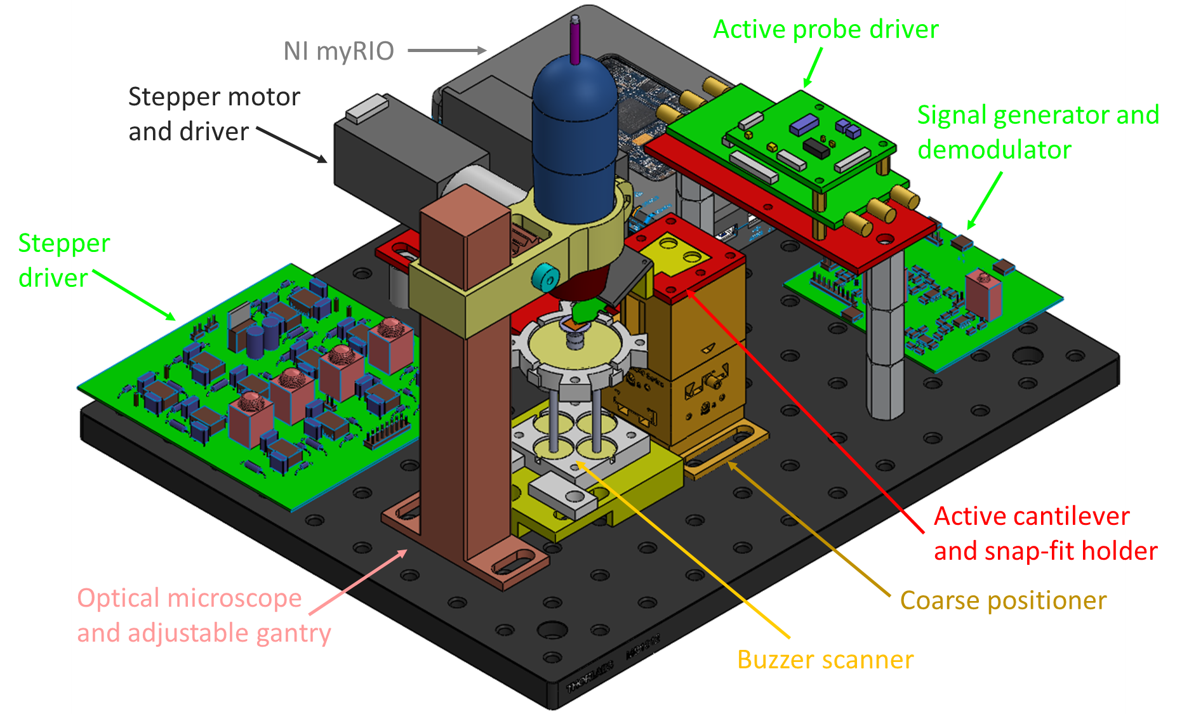
abstract = {Precision mechatronics and nanotechnology communities can both benefit from a course centered around an Atomic Force Microscope (AFM). Developing an AFM can provide precision mechatronics engineers with a valuable multidisciplinary hands-on training experience. In return, such expertise can be applied to the design and implementation of new precision instruments, which helps nanotechnology researchers make new scientific discoveries. However, existing AFMs are not suitable for mechatronics education due to their different original design intentions. Therefore, we address this challenge by developing an AFM intended for precision mechatronics education. This paper presents the design and implementation of an educational AFM and its corresponding precision mechatronics class. The modular educational AFM is low-cost (≤$4,000) and easy to operate. The cost reduction is enabled by new subsystem development of a buzzer-actuated scanner and demodulation electronics designed to interface with a myRIO data acquisition system. Moreover, the use of an active cantilever probe with piezoresistive sensing and thermomechanical actuation significantly reduced experiment setup overhead with improved operational safety. In the end, the developed AFM capabilities are demonstrated with imaging results. The paper also showcases the course design centered around selected subsystems. The new AFM design allows scientific-method-based learning, maximizes utilization of existing resources, and offers potential subsystem upgrades for high-end research applications. The presented instrument and course can help connect members of both the AFM and the mechatronics communities to further develop advanced techniques for new applications.},
keywords = {Experimentation, Fabrication, Instrumentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling},
pubstate = {published},
tppubtype = {article}
}
2019
Chen Yang; Fangzhou Xia; Yi Wang; Stephen Truncale; Kamal Youcef-Toumi
Design and Control of a Multi-Actuated Nanopositioning Stage with Stacked Structure Proceedings Article
In: 2019 American Control Conference (ACC), pp. 3782–3788, IEEE IEEE, 2019, ISBN: 978-1-5386-7926-5.
Abstract | Links | BibTeX | Tags: Experimentation, Fabrication, Instrumentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Simulation
@inproceedings{MRL_AFM_Stacked_Nanopositioner,
title = {Design and Control of a Multi-Actuated Nanopositioning Stage with Stacked Structure},
author = {Chen Yang and Fangzhou Xia and Yi Wang and Stephen Truncale and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/8815299},
doi = {10.23919/ACC.2019.8815299},
isbn = {978-1-5386-7926-5},
year = {2019},
date = {2019-08-29},
booktitle = {2019 American Control Conference (ACC)},
pages = {3782--3788},
publisher = {IEEE},
organization = {IEEE},
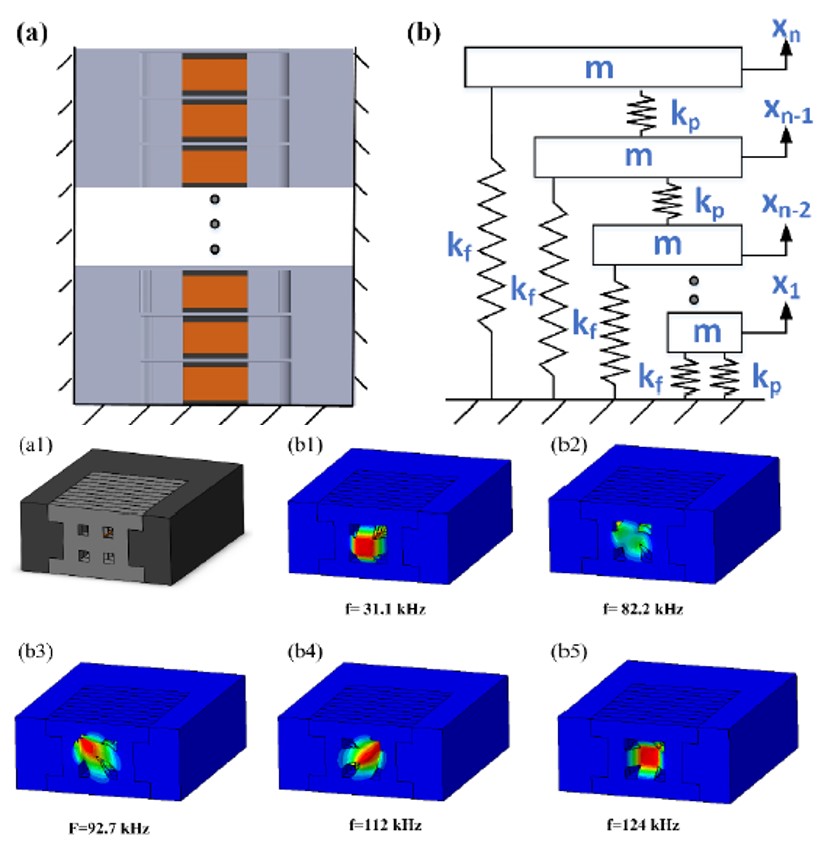
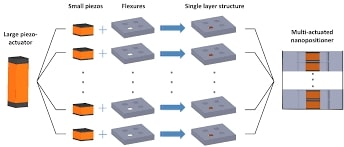
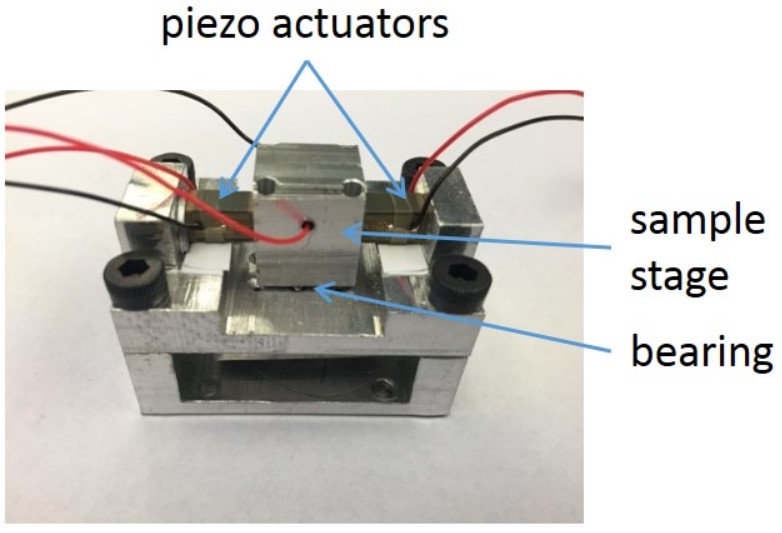
abstract = {A novel multi-actuated nanopositioning stage with stacked structure has been developed. The aim is to achieve both high bandwidth and large motion range. Symmetric flexures are designed to obtain equal stiffness along any direction in the lateral plane. With this design, the lateral stiffness and corresponding bending mode resonance frequency can be optimized. Both analytical model and finite element analysis are employed to predict the dominant resonance frequency. Experimental results indicate that the dominant resonance of nanopositioner is at 28.2 kHz, with a motion range of 16.5J.1m. A disturbance-observer-based controller is implemented to suppress the hysteretic nonlinearity. The new design and control system enable high-bandwidth and high-precision nanopositioning up to 2 kHz.},
keywords = {Experimentation, Fabrication, Instrumentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
Erik Gest; Mikio Furokawa; Takayuki Hirano; Kamal Youcef-Toumi
Design of Versatile and Low-Cost Shaft Sensor for Health Monitoring Proceedings Article
In: pp. 1926-1932, IEEE IEEE, 2019, ISBN: 978-1-5386-6027-0.
Abstract | Links | BibTeX | Tags: Control Theory, Data-driven learning for intelligent machine maintenance, Experimentation, Fabrication, Instrumentation, intelligent systems, Physical System Modeling, Simulation
@inproceedings{MRL_AFM_Shaft_Sensor_Health_Monitoring,
title = {Design of Versatile and Low-Cost Shaft Sensor for Health Monitoring},
author = {Erik Gest and Mikio Furokawa and Takayuki Hirano and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/8794408},
doi = {10.1109/ICRA.2019.8794408},
isbn = {978-1-5386-6027-0},
year = {2019},
date = {2019-08-12},
pages = {1926-1932},
publisher = {IEEE},
organization = {IEEE},
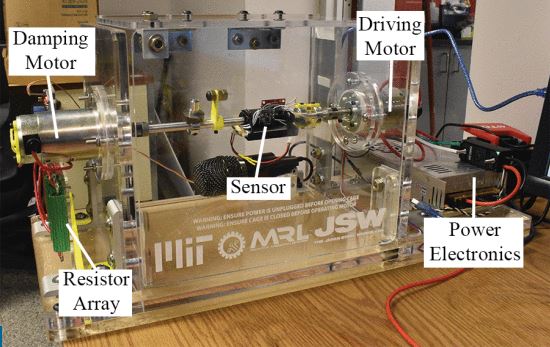
abstract = {Virtually every mechanized form of transportation, power generation system, industrial equipment, and robotic system has rotating shafts. As the shaft is often the main means of mechanical power transmission, measuring the torque, speed, vibration, and bending of the shaft can be used in many cases to access device performance and health and to implement controls. This paper proposes a shaft sensor that measures all of these phenomena with reasonable accuracy while having a low cost and simple installation process. This sensor transfers strain from the shaft and amplifies it to increase sensitivity. Furthermore, this sensor requires no components to be in the stationary reference frame, allowing the entire device to rotate with the shaft. A prototype is presented. Experimental results illustrate the effectiveness of the proposed system.},
keywords = {Control Theory, Data-driven learning for intelligent machine maintenance, Experimentation, Fabrication, Instrumentation, intelligent systems, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
C Yang; F Xia; Y Wang; S Truncale; K Youcef-Toumi
Design and Control of a Multi-Actuated Nanopositioning Stage with Stacked Structure Proceedings Article
In: 2019 American Control Conference (ACC), pp. 3782-3788, IEEE, 2019, ISSN: 2378-5861.
Abstract | Links | BibTeX | Tags: Control Theory, Direct-drive robots for laser cutting manufacturing, Fabrication, Instrumentation, Mechatronic Design, Robotics & Automation
@inproceedings{MRL_AFM_Nanopositioning_Stage_Stacked,
title = {Design and Control of a Multi-Actuated Nanopositioning Stage with Stacked Structure},
author = {C Yang and F Xia and Y Wang and S Truncale and K Youcef-Toumi},
doi = {10.23919/ACC.2019.8815299},
issn = {2378-5861},
year = {2019},
date = {2019-07-12},
booktitle = {2019 American Control Conference (ACC)},
journal = {xplore},
pages = {3782-3788},
publisher = {IEEE},
abstract = {A novel multi-actuated nanopositioning stage with stacked structure has been developed. The aim is to achieve both high bandwidth and large motion range. Symmetric flexures are designed to obtain equal stiffness along any direction in the lateral plane. With this design, the lateral stiffness and corresponding bending mode resonance frequency can be optimized. Both analytical model and finite element analysis are employed to predict the dominant resonance frequency. Experimental results indicate that the dominant resonance of nanopositioner is at 28.2 kHz, with a motion range of 16.5J.1m. A disturbance-observer-based controller is implemented to suppress the hysteretic nonlinearity. The new design and control system enable high-bandwidth and high-precision nanopositioning up to 2 kHz.},
keywords = {Control Theory, Direct-drive robots for laser cutting manufacturing, Fabrication, Instrumentation, Mechatronic Design, Robotics & Automation},
pubstate = {published},
tppubtype = {inproceedings}
}
Fangzhou Xia; Chen Yang; Yi Wang; Kamal Youcef-Toumi; Christoph Reuter; Tzvetan Ivanov; Mathias Holz; Ivo W Rangelow
Lights Out! Nano-Scale Topography Imaging of Sample Surface in Opaque Liquid Environments with Coated Active Cantilever Probes Journal Article
In: Nanomaterials, vol. 9, no. 7, pp. 1013, 2019.
Abstract | Links | BibTeX | Tags: Experimentation, Fabrication, Full text available online, Instrumentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Visualization
@article{MRL_AFM_coated_probe,
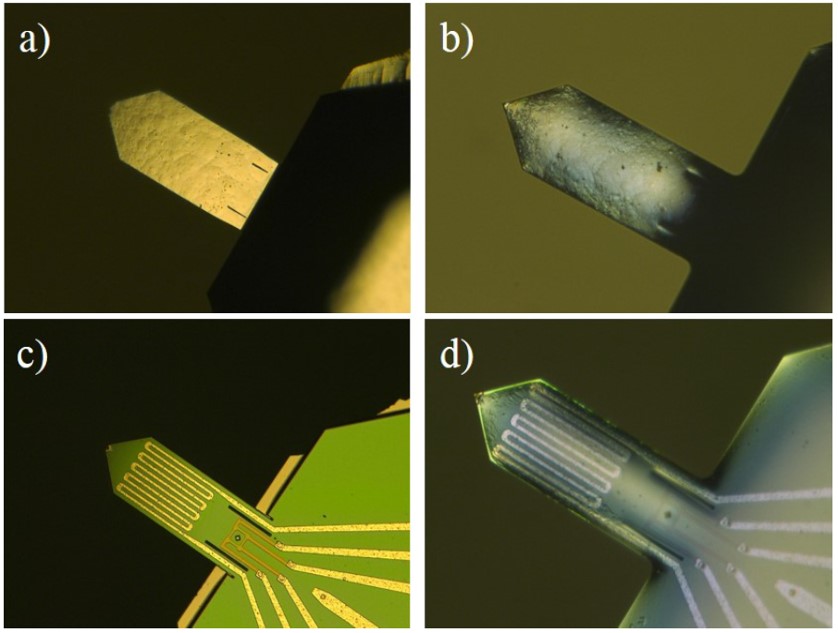
title = {Lights Out! Nano-Scale Topography Imaging of Sample Surface in Opaque Liquid Environments with Coated Active Cantilever Probes},
author = {Fangzhou Xia and Chen Yang and Yi Wang and Kamal Youcef-Toumi and Christoph Reuter and Tzvetan Ivanov and Mathias Holz and Ivo W Rangelow},
url = {https://www.ncbi.nlm.nih.gov/pmc/articles/PMC6669515/},
doi = {10.3390/nano9071013},
year = {2019},
date = {2019-07-09},
journal = {Nanomaterials},
volume = {9},
number = {7},
pages = {1013},
publisher = {Multidisciplinary Digital Publishing Institute},
abstract = {Atomic force microscopy is a powerful topography imaging method used widely in nanoscale metrology and manipulation. A conventional Atomic Force Microscope (AFM) utilizes an optical lever system typically composed of a laser source, lenses and a four quadrant photodetector to amplify and measure the deflection of the cantilever probe. This optical method for deflection sensing limits the capability of AFM to obtaining images in transparent environments only. In addition, tapping mode imaging in liquid environments with transparent sample chamber can be difficult for laser-probe alignment due to multiple different refraction indices of materials. Spurious structure resonance can be excited from piezo actuator excitation. Photothermal actuation resolves the resonance confusion but makes optical setup more complicated. In this paper, we present the design and fabrication method of coated active scanning probes with piezoresistive deflection sensing, thermomechanical actuation and thin photoresist polymer surface coating. The newly developed probes are capable of conducting topography imaging in opaque liquids without the need of an optical system. The selected coating can withstand harsh chemical environments with high acidity (e.g., 35% sulfuric acid). The probes are operated in various opaque liquid environments with a custom designed AFM system to demonstrate the imaging performance. The development of coated active probes opens up possibilities for observing samples in their native environments.},
keywords = {Experimentation, Fabrication, Full text available online, Instrumentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Visualization},
pubstate = {published},
tppubtype = {article}
}
2018

Chen Yang; Changle Li; Fangzhou Xia; Yanhe Zhu; Jie Zhao; Kamal Youcef-Toumi
Charge Controller With Decoupled and Self-Compensating Configurations for Linear Operation of Piezoelectric Actuators in a Wide Bandwidth Journal Article
In: IEEE Transactions on Industrial Electronics, vol. 66, no. 7, pp. 5392–5402, 2018.
Abstract | Links | BibTeX | Tags: Control Theory, Experimentation, Instrumentation, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation
@article{MRL_AFM_Charge_Controller_Self_Compensating,
title = {Charge Controller With Decoupled and Self-Compensating Configurations for Linear Operation of Piezoelectric Actuators in a Wide Bandwidth},
author = {Chen Yang and Changle Li and Fangzhou Xia and Yanhe Zhu and Jie Zhao and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/8466119},
doi = {10.1109/TIE.2018.2868321},
year = {2018},
date = {2018-09-14},
journal = {IEEE Transactions on Industrial Electronics},
volume = {66},
number = {7},
pages = {5392--5402},
publisher = {IEEE},
abstract = {Charge control is a well-known sensorless approach to operate piezoelectric actuators, which has been proposed for more than 30 years. However, it is rarely used in industry because the implemented controllers suffer from the issues of limited low-frequency performance, long settling time, floating-load, and loss of stroke, etc. In this paper, a novel controller circuit dedicated to overcome these issues is presented. In the proposed scheme, a grounded-load charge controller with decoupled configuration is developed, which separates high-frequency and low-frequency paths, thus achieving arbitrarily low transition frequency without increasing the settling time. Based on this, a self-compensating configuration is further proposed and integrated into the controller circuit, which makes full use of controller output to improve its own control performance at low frequencies. Experimental results show that the presented charge controller can effectively reduce more than 88% of the hysteretic nonlinearity even when operating close to the transition frequency. To demonstrate its practical value, we then integrate it into a custom-designed high-speed atomic force microscope system. By comparing images obtained from using voltage drive and charge controller, it is clear that the piezoelectric hysteresis has been significantly reduced in a wide bandwidth.},
keywords = {Control Theory, Experimentation, Instrumentation, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {article}
}
Fangzhou Xia; Stephen Truncale; Yi Wang; Kamal Youcef-Toumi
Design and Control of a Multi-actuated High-bandwidth and Large-range Scanner for Atomic Force Microscopy Proceedings Article
In: 2018 Annual American Control Conference (ACC), pp. 4330–4335, IEEE IEEE, 2018.
Abstract | Links | BibTeX | Tags: Control Theory, Experimentation, Fabrication, Instrumentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation
@inproceedings{MRL_AFM_Dual_Actuated_Scanner,
title = {Design and Control of a Multi-actuated High-bandwidth and Large-range Scanner for Atomic Force Microscopy},
author = {Fangzhou Xia and Stephen Truncale and Yi Wang and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/8431801},
doi = {10.23919/ACC.2018.8431801},
year = {2018},
date = {2018-08-16},
booktitle = {2018 Annual American Control Conference (ACC)},
pages = {4330--4335},
publisher = {IEEE},
organization = {IEEE},
abstract = {Atomic force microscopes (AFMs) with high-speed and large-range capabilities open up possibilities for many new applications. It is desirable to have a large scanning range along with zooming ability to obtain high resolution and high frame-rate imaging. Such capabilities will increase the imaging throughput and allow more sophisticated observations at the nanoscale. Unfortunately, in-plane scanning of conventional piezo tube scanners typically covers a large range of hundreds of microns but has limited bandwidth up to several hundred Hertz. The main focus of this paper is the multi-actuated piezo scanner design and control algorithm to achieve high-speed tracking. Three design strategies for structure bandwidth and operational range consideration are presented and evaluated. The non-linear hysteresis effect of the piezo actuators is modeled using the Preisach hysteresis model. PID control, iterative learning control and repetitive control strategies were investigated in simulation. Based on the controllers performance, the repetitive controller is implemented on a high-speed FPGA device and experimentally verified. The new AFM scanner design is capable of 10 kHz tracking at 3 μm range and 200 Hz tracking at 100 μm range.},
keywords = {Control Theory, Experimentation, Fabrication, Instrumentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
2017
Ivo W Rangelow; Tzvetan Ivanov; Ahmad Ahmad; Marcus Kaestner; Claudia Lenk; Iman Soltani Bozchalooi; Fangzhou Xia; Kamal Youcef-Toumi; Mathias Holz; Alexander Reum
Review Article: Active scanning probes: A versatile toolkit for fast imaging and emerging nanofabrication Journal Article
In: Journal of Vacuum Science & Technology B, Nanotechnology and Microelectronics: Materials, Processing, Measurement, and Phenomena, vol. 35, no. 6, pp. 06G101, 2017.
Abstract | Links | BibTeX | Tags: Instrumentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Visualization
@article{MRL_AFM_active_probe_review,
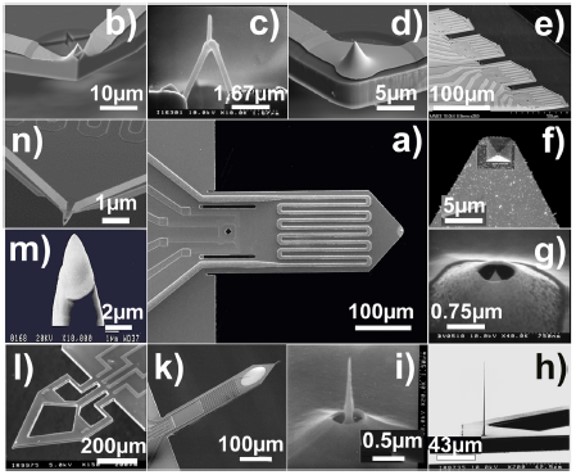
title = {Review Article: Active scanning probes: A versatile toolkit for fast imaging and emerging nanofabrication},
author = {Ivo W Rangelow and Tzvetan Ivanov and Ahmad Ahmad and Marcus Kaestner and Claudia Lenk and Iman Soltani Bozchalooi and Fangzhou Xia and Kamal Youcef-Toumi and Mathias Holz and Alexander Reum},
url = {https://avs.scitation.org/doi/full/10.1116/1.4992073},
doi = {10.1116/1.4992073},
year = {2017},
date = {2017-11-03},
journal = {Journal of Vacuum Science & Technology B, Nanotechnology and Microelectronics: Materials, Processing, Measurement, and Phenomena},
volume = {35},
number = {6},
pages = {06G101},
publisher = {American Vacuum Society},
abstract = {With the recent advances in the field of nanotechnology, measurement and manipulation requirements at the nanoscale have become more stringent than ever before. In atomic force microscopy, high-speed performance alone is not sufficient without considerations of other aspects of the measurement task, such as the feature aspect ratio, required range, or acceptable probe-sample interaction forces. In this paper, the authors discuss these requirements and the research directions that provide the highest potential in meeting them. The authors elaborate on the efforts toward the downsizing of self-sensed and self-actuated probes as well as on upscaling by active cantilever arrays. The authors present the fabrication process of active probes along with the tip customizations carriedout targeting specific application fields. As promising application in scope of nanofabrication, field emission scanning probe lithography is introduced. The authors further discuss their control and design approach. Here, microactuators, e.g., multilayer microcantilevers, and macroactuators, e.g., flexure scanners, are combined in order to simultaneously meet both the range and speed requirements of a new generation of scanning probe microscopes.},
keywords = {Instrumentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Visualization},
pubstate = {published},
tppubtype = {article}
}
S Mekid; D Wu; R Hussain; K Youcef-Toumi
Channel modeling and testing of wireless transmission for underground in-pipe leak and material loss detection Journal Article
In: International Journal of Distributed Sensor Networks, vol. 13, no. 11, pp. 1550147717744715, 2017, ISSN: 1550147717744715.
Abstract | Links | BibTeX | Tags: Fabrication, Inspection, Inspection; repair and intelligence for water distribution pipes, Instrumentation, Mechatronic Design, Nanotechnology, Physical System Modeling
@article{MRL_AFM_Channel_Modeling,
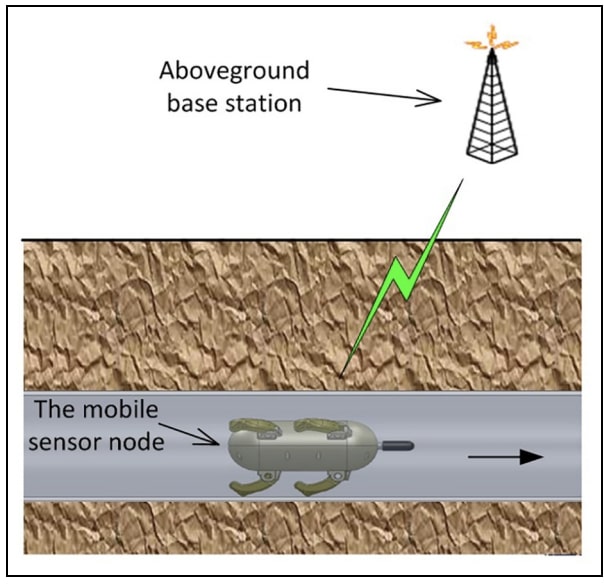
title = {Channel modeling and testing of wireless transmission for underground in-pipe leak and material loss detection},
author = {S Mekid and D Wu and R Hussain and K Youcef-Toumi},
url = {https://doi.org/10.1177/1550147717744715},
doi = {10.1177/1550147717744715},
issn = {1550147717744715},
year = {2017},
date = {2017-01-01},
journal = {International Journal of Distributed Sensor Networks},
volume = {13},
number = {11},
pages = {1550147717744715},
publisher = {Sage},
abstract = {A systematic real-time methodology is adopted for leak detection in underground buried pipes. The wireless communication system is used to analyze the system performance based on the received power by monopole antenna deployed at the receiving side. Instrumentation designed for underground measurement and control such as leak and materials loss detection needs wireless communications to aboveground in both ways and in real-time mode. This constitutes one of the timely and challenging issues of battery-operated systems. The purpose of this work is to characterize the radio transmission between underground buried pipes and base station using multi-layer media including both theoretical and experimental approaches by utilizing various modulation schemes. The objective is to identify the range of operating communication frequencies having lower energy loss, lower resulting bit error rate, and the power needed to transfer packets designed to carry data through the media. This will support the on-device power management to secure large autonomy operations. Experimental tests have shown that the overall received energy was mixed with ambient energy if the latter is sent at the same frequency and that the optimum frequency range used to transmit energy was rather at low frequency range of 100–200 MHz.},
keywords = {Fabrication, Inspection, Inspection; repair and intelligence for water distribution pipes, Instrumentation, Mechatronic Design, Nanotechnology, Physical System Modeling},
pubstate = {published},
tppubtype = {article}
}
2016
Taha Elmokadem; Mohamed Zribi; Kamal Youcef-Toumi
Terminal sliding mode control for the trajectory tracking of underactuated Autonomous Underwater Vehicles Journal Article
In: Ocean Engineering, vol. 129, pp. 613-625, 2016, ISSN: 0029-8018.
Abstract | Links | BibTeX | Tags: Computer vision for autonomous vehicle sensing, Instrumentation, Mechatronic Design, Physical System Modeling, Robotics & Automation
@article{MRL_AFM_Terminal_Trajectory_Tracking,
title = {Terminal sliding mode control for the trajectory tracking of underactuated Autonomous Underwater Vehicles},
author = {Taha Elmokadem and Mohamed Zribi and Kamal Youcef-Toumi},
url = {https://www.sciencedirect.com/science/article/pii/S0029801816304759},
doi = {https://doi.org/10.1016/j.oceaneng.2016.10.032},
issn = {0029-8018},
year = {2016},
date = {2016-11-06},
journal = {Ocean Engineering},
volume = {129},
pages = {613-625},
publisher = {elsevier},
abstract = {The aim of this paper is to develop robust control schemes for the lateral motion of underactuated autonomous underwater vehicles (AUVs). The AUV complex dynamics makes their control a challenging task. These challenges include the AUV nonlinear dynamics, unmodeled dynamics, system uncertainties and environmental disturbances. The objective of the proposed control schemes is to solve the trajectory tracking problem of AUVs. These controllers are designed using the concepts of terminal sliding mode control. The control performance of an example AUV (the REMUS AUV), using the proposed control schemes, is evaluated through computer simulations. The simulation results show that the proposed control schemes work well. Moreover, simulation studies are given to evaluate the performance of the proposed control schemes when bounded disturbances are acting on the vehicle. These studies indicate that the proposed control schemes are robust under bounded disturbances.},
keywords = {Computer vision for autonomous vehicle sensing, Instrumentation, Mechatronic Design, Physical System Modeling, Robotics & Automation},
pubstate = {published},
tppubtype = {article}
}
Iman Soltani Bozchalooi; Andrew Careaga Houck; Jwaher M. AlGhamdi; Kamal Youcef-Toumi
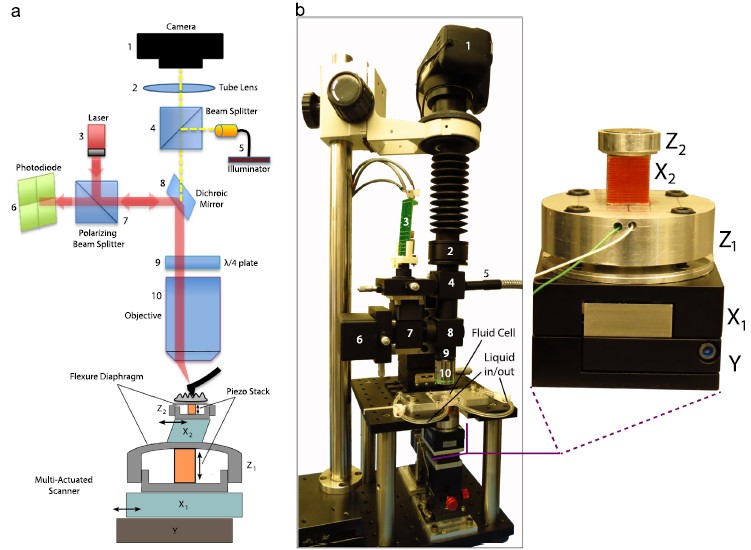
Design and control of multi-actuated atomic force microscope for large-range and high-speed imaging Journal Article
In: vol. 160, pp. 213 - 224, 2016, ISSN: 0304-3991.
Abstract | Links | BibTeX | Tags: Control Theory, Experimentation, Fabrication, Instrumentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Simulation, Visualization
@article{MRL_AFM_LRHS_imaging,
title = {Design and control of multi-actuated atomic force microscope for large-range and high-speed imaging},
author = {Iman Soltani Bozchalooi and Andrew Careaga Houck and Jwaher M. AlGhamdi and Kamal Youcef-Toumi},
url = {http://www.sciencedirect.com/science/article/pii/S0304399115300528 https://www.youtube.com/watch?v=PQ-zE6wA61c},
doi = {https://doi.org/10.1016/j.ultramic.2015.10.016},
issn = {0304-3991},
year = {2016},
date = {2016-01-01},
volume = {160},
pages = {213 - 224},
abstract = {This paper presents the design and control of a high-speed and large-range atomic force microscopy (AFM). A multi-actuation scheme is proposed where several nano-positioners cooperate to achieve the range and speed requirements. A simple data-based control design methodology is presented to effectively operate the AFM scanner components. The proposed controllers compensate for the coupled dynamics and divide the positioning responsibilities between the scanner components. As a result, the multi-actuated scanner behavior is equivalent to that of a single X–Y–Z positioner with large range and high speed. The scanner of the designed AFM is composed of five nano-positioners, features 6μm out-of-plane and 120μm lateral ranges and is capable of high-speed operation. The presented AFM has a modular design with laser spot size of 3.5μm suitable for small cantilever, an optical view of the sample and probe, a conveniently large waterproof sample stage and a 20MHz data throughput for high resolution image acquisition at high imaging speeds. This AFM is used to visualize etching of calcite in a solution of sulfuric acid. Layer-by-layer dissolution and pit formation along the crystalline lines in a low pH environment is observed in real time.},
keywords = {Control Theory, Experimentation, Fabrication, Instrumentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Simulation, Visualization},
pubstate = {published},
tppubtype = {article}
}
2014
Iman Soltani Bozchalooi; Kamal Youcef-Toumi
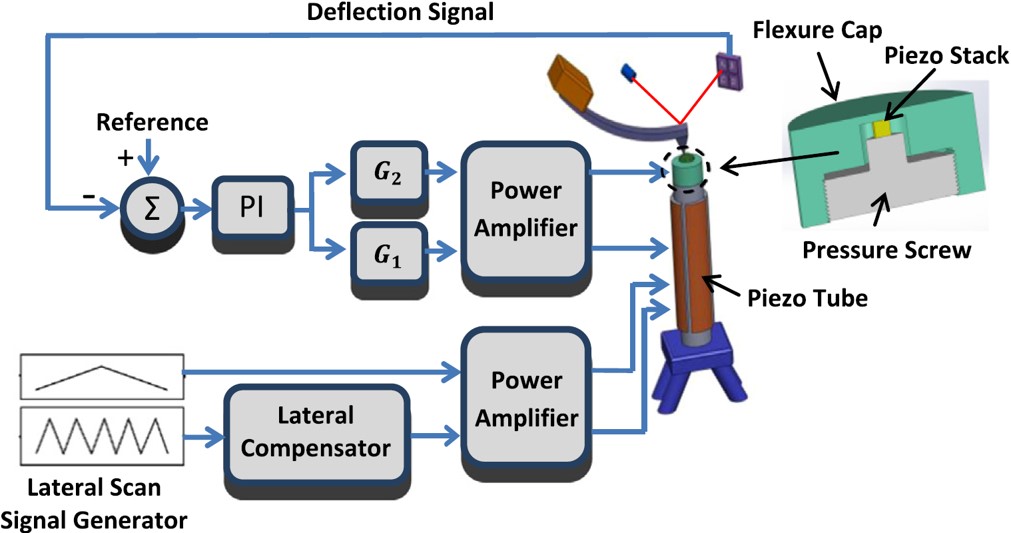
Multi-actuation and PI control: A simple recipe for high-speed and large-range atomic force microscopy Journal Article
In: Ültramicroscopy, vol. 146, pp. 117 - 124, 2014, ISSN: 0304-3991.
Abstract | Links | BibTeX | Tags: Control Theory, Experimentation, Instrumentation, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation
@article{MRL_AFM_Multi_PI_control,
title = {Multi-actuation and PI control: A simple recipe for high-speed and large-range atomic force microscopy},
author = {Iman Soltani Bozchalooi and Kamal Youcef-Toumi},
url = {http://www.sciencedirect.com/science/article/pii/S0304399114001491},
doi = {https://doi.org/10.1016/j.ultramic.2014.07.010},
issn = {0304-3991},
year = {2014},
date = {2014-01-01},
journal = {Ültramicroscopy},
volume = {146},
pages = {117 - 124},
abstract = {High speed atomic force microscopy enables observation of dynamic nano-scale processes. However, maintaining a minimal interaction force between the sample and the probe is challenging at high speed specially when using conventional piezo-tubes. While rigid AFM scanners are operational at high speeds with the drawback of reduced tracking range, multi-actuation schemes have shown potential for high-speed and large-range imaging. Here we present a method to seamlessly incorporate additional actuators into conventional AFMs. The equivalent behavior of the resulting multi-actuated setup resembles that of a single high-speed and large-range actuator with maximally flat frequency response. To achieve this, the dynamics of the individual actuators and their couplings are treated through a simple control scheme. Upon the implementation of the proposed technique, commonly used PI controllers are able to meet the requirements of high-speed imaging. This forms an ideal platform for retroactive enhancement of existing AFMs with minimal cost and without compromise on the tracking range. A conventional AFM with tube scanner is retroactively enhanced through the proposed method and shows an order of magnitude improvement in closed loop bandwidth performance while maintaining large range. The effectiveness of the method is demonstrated on various types of samples imaged in contact and tapping modes, in air and in liquid.},
keywords = {Control Theory, Experimentation, Instrumentation, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {article}
}
2013
Ajay Deshpande; Sanjay E Sarma; Kamal Youcef-Toumi; Samir Mekid
Optimal coverage of an infrastructure network using sensors with distance-decaying sensing quality Journal Article
In: Automatica, vol. 49, no. 11, pp. 3351-3358, 2013, ISSN: 0005-1098.
Abstract | Links | BibTeX | Tags: Experimentation, Fabrication, Instrumentation, Mechatronic Design, Modeling; sizing and control of smart grids, Physical System Modeling
@article{MRL_AFM_Distance_Decaying_Sensors,
title = {Optimal coverage of an infrastructure network using sensors with distance-decaying sensing quality},
author = {Ajay Deshpande and Sanjay E Sarma and Kamal Youcef-Toumi and Samir Mekid},
url = {https://www.sciencedirect.com/science/article/pii/S0005109813003774},
doi = {https://doi.org/10.1016/j.automatica.2013.07.029},
issn = {0005-1098},
year = {2013},
date = {2013-08-27},
journal = {Automatica},
volume = {49},
number = {11},
pages = {3351-3358},
publisher = {elsevier},
abstract = {Motivated by recent applications of wireless sensor networks in monitoring infrastructure networks, we address the problem of optimal coverage of infrastructure networks using sensors whose sensing performance decays with distance. We show that this problem can be formulated as a continuous p-median problem on networks. The literature has addressed the discrete p-median problem on networks and in continuum domains, and the continuous p-median problem in continuum domains extensively. However, in-depth analysis of the continuous p-median problem on networks has been lacking. With the sensing performance model that decays with distance, each sensor covers a region equivalent to its Voronoi partition on the network in terms of the shortest path distance metric. Using Voronoi partitions, we define a directional partial derivative of the coverage metric with respect to a sensor’s location. We then propose a gradient descent algorithm to obtain a locally optimal solution with guaranteed convergence. The quality of an optimal solution depends on the choice of the initial configuration of sensors. We obtain an initial configuration using two approaches: by solving the discrete p-median problem on a lumped network and by random sampling. We consider two methods of random sampling: uniform sampling and D2-sampling. The first approach with the initial solution of the discrete p-median problem leads to the best coverage performance for large networks, but at the cost of high running time. We also observe that the gradient descent on the initial solution with the D2-sampling method yields a solution that is within at most 7% of the previous solution and with much shorter running time.},
keywords = {Experimentation, Fabrication, Instrumentation, Mechatronic Design, Modeling; sizing and control of smart grids, Physical System Modeling},
pubstate = {published},
tppubtype = {article}
}
2012
Soltani I Bozchalooi; Kamal Youcef-Toumi; D J Burns; Georg E Fantner
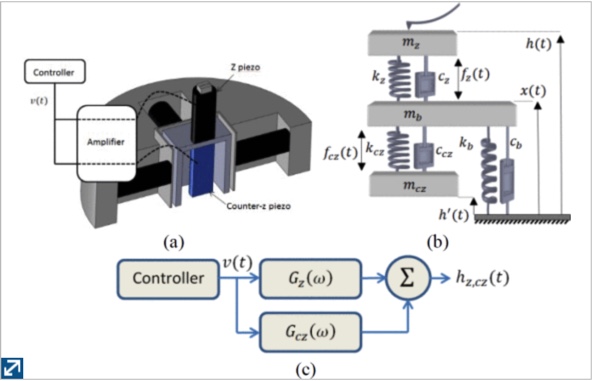
A vibration suppression approach to high-speed atomic force microscopy Proceedings Article
In: 2012 American Control Conference (ACC), pp. 3797-3802, ACC ACC, 2012, ISBN: 978-1-4577-1096-4.
Abstract | Links | BibTeX | Tags: Control Theory, Experimentation, Instrumentation, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation, Visualization
@inproceedings{MRL_AFM_Vibration_Suppression,
title = {A vibration suppression approach to high-speed atomic force microscopy},
author = {Soltani I Bozchalooi and Kamal Youcef-Toumi and D J Burns and Georg E Fantner},
url = {https://ieeexplore.ieee.org/document/6315281},
doi = {10.1109/ACC.2012.6315281},
isbn = {978-1-4577-1096-4},
year = {2012},
date = {2012-10-02},
booktitle = {2012 American Control Conference (ACC)},
pages = {3797-3802},
publisher = {ACC},
organization = {ACC},
abstract = {The possibility of many new applications and novel scientific observations can be provided by efficient and reliable high-speed atomic force microscopy techniques. However, the reliability of the AFM images decreases significantly as the imaging speed is increased to levels required for the targeted real-time observation of nano-scale phenomenon. One of the main reasons behind this limitation is the excitation of the AFM dynamics at high scan speeds. In this research we propose a piezo based, feedforward controlled, counter actuation mechanism to compensate for the excited out-of-plane scanner dynamics. For this purpose the AFM controller output is properly filtered via a linear compensator and then applied to a counter actuating piezo. The information required for compensator design is extracted from the cantilever deflection signal hence, eliminating the need for any additional sensors. The proposed approach is implemented and experimentally evaluated on the dynamic response of a custom made AFM. It is further assessed by comparing the imaging performance of the AFM with and without the application of the proposed technique and in comparison with the conventional counterbalancing methodology. The experimental results substantiate the effectiveness of the method in significantly improving the imaging performance of AFM at high scan speeds.},
keywords = {Control Theory, Experimentation, Instrumentation, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
2011
Tavakoli H Nia; L Han; Y Li; Soltani I Bozchalooi; H Hung; E Frank; K Youcef-Toumi; A Grodzinsky; C Orti
The effect of GAG depletion on cartilage nanoscale hydraulic permeability Proceedings Article
In: ORS 2012 Annual Meeting, pp. 0282, ORS ORS, 2011, ISBN: 978-1-4577-1096-4.
Abstract | Links | BibTeX | Tags: Control Theory, Instrumentation, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation
@inproceedings{MRL_AFM_GAG_Depletion,
title = {The effect of GAG depletion on cartilage nanoscale hydraulic permeability},
author = {Tavakoli H Nia and L Han and Y Li and Soltani I Bozchalooi and H Hung and E Frank and K Youcef-Toumi and A Grodzinsky and C Orti},
url = {http://www.ors.org/Transactions/58/0282.pdf},
doi = {10.1109/ACC.2012.6315281},
isbn = {978-1-4577-1096-4},
year = {2011},
date = {2011-01-01},
booktitle = {ORS 2012 Annual Meeting},
pages = {0282},
publisher = {ORS},
organization = {ORS},
abstract = {The advent of new time-dependent nanomechanical methods has recently enabled the quantification of cartilage tissue poroelasticity and hydraulic permeability, k, at the nanoscale [1-3] and holds great potential for early detection of pathological changes and diagnosis of osteoarthritis (OA). It is known that at the macroscale, tissue hydraulic permeability can undergo several order-of-magnitude changes due to OA [4] while the equilibrium stiffness may vary by only a factor of 2 [5]. This is because GAG chains are the main determinant of the pore size (consequently, hydraulic permeability) of cartilage while they contribute only partially to the compression stiffness of the tissue. Here, we extend the technique of atomic force microscope-based dynamic oscillatory nanoindentation to a larger frequency range (1-10,000 Hz) and compare these data to finite element analysis simulations to study the effect of GAG content, relevant to early stage OA.},
keywords = {Control Theory, Instrumentation, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
0000
C Yang; C Li; F Xia; Y Zhu; J Zhao; K Youcef-Toumi
Charge Controller With Decoupled and Self-Compensating Configurations for Linear Operation of Piezoelectric Actuators in a Wide Bandwidth Journal Article
In: IEEE Transactions on Industrial Electronics, vol. 66, no. 7, pp. 5392-5402, 0000, ISSN: 1557-9948.
Abstract | Links | BibTeX | Tags: Control Theory, Instrumentation, Nanotechnology, Physical System Modeling, Robot operated modular fixtures, Visualization
@article{MRL_AFM_Charge_Controller_Compensating_Configs,
title = {Charge Controller With Decoupled and Self-Compensating Configurations for Linear Operation of Piezoelectric Actuators in a Wide Bandwidth},
author = {C Yang and C Li and F Xia and Y Zhu and J Zhao and K Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/8466119},
doi = {10.1109/TIE.2018.2868321},
issn = {1557-9948},
journal = {IEEE Transactions on Industrial Electronics},
volume = {66},
number = {7},
pages = {5392-5402},
abstract = {Charge control is a well-known sensorless approach to operate piezoelectric actuators, which has been proposed for more than 30 years. However, it is rarely used in industry because the implemented controllers suffer from the issues of limited low-frequency performance, long settling time, floating-load, and loss of stroke, etc. In this paper, a novel controller circuit dedicated to overcome these issues is presented. In the proposed scheme, a grounded-load charge controller with decoupled configuration is developed, which separates high-frequency and low-frequency paths, thus achieving arbitrarily low transition frequency without increasing the settling time. Based on this, a self-compensating configuration is further proposed and integrated into the controller circuit, which makes full use of controller output to improve its own control performance at low frequencies. Experimental results show that the presented charge controller can effectively reduce more than 88% of the hysteretic nonlinearity even when operating close to the transition frequency. To demonstrate its practical value, we then integrate it into a custom-designed high-speed atomic force microscope system. By comparing images obtained from using voltage drive and charge controller, it is clear that the piezoelectric hysteresis has been significantly reduced in a wide bandwidth.},
keywords = {Control Theory, Instrumentation, Nanotechnology, Physical System Modeling, Robot operated modular fixtures, Visualization},
pubstate = {published},
tppubtype = {article}
}