
Mechatronics Research Lab Publications
List still being populated due to webpage maintenance
2020
Fangzhou Xia; Chen Yang; Yi Wang; Kamal Youcef-Toumi
Model and Controller Design for High-speed Atomic Force Microscope Imaging and Autotuning Proceedings Article
In: 2020 ASPE Spring Topical Meeting on Design and Control of Precision Mechatronic Systems, pp. 99–104, ASPE ASPE, 2020.
Abstract | Links | BibTeX | Tags: Control Theory, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation
@inproceedings{MRL_AFM_Imaging_Autotuning,
title = {Model and Controller Design for High-speed Atomic Force Microscope Imaging and Autotuning},
author = {Fangzhou Xia and Chen Yang and Yi Wang and Kamal Youcef-Toumi},
url = {https://www.dropbox.com/s/vekbaco9oq3kkuu/2020%20Spring%20Topical%20Design%20and%20Controls%20Proceedings%20revised%20DT.pdf?dl=0},
year = {2020},
date = {2020-05-08},
booktitle = {2020 ASPE Spring Topical Meeting on Design and Control of Precision Mechatronic Systems},
pages = {99--104},
publisher = {ASPE},
organization = {ASPE},
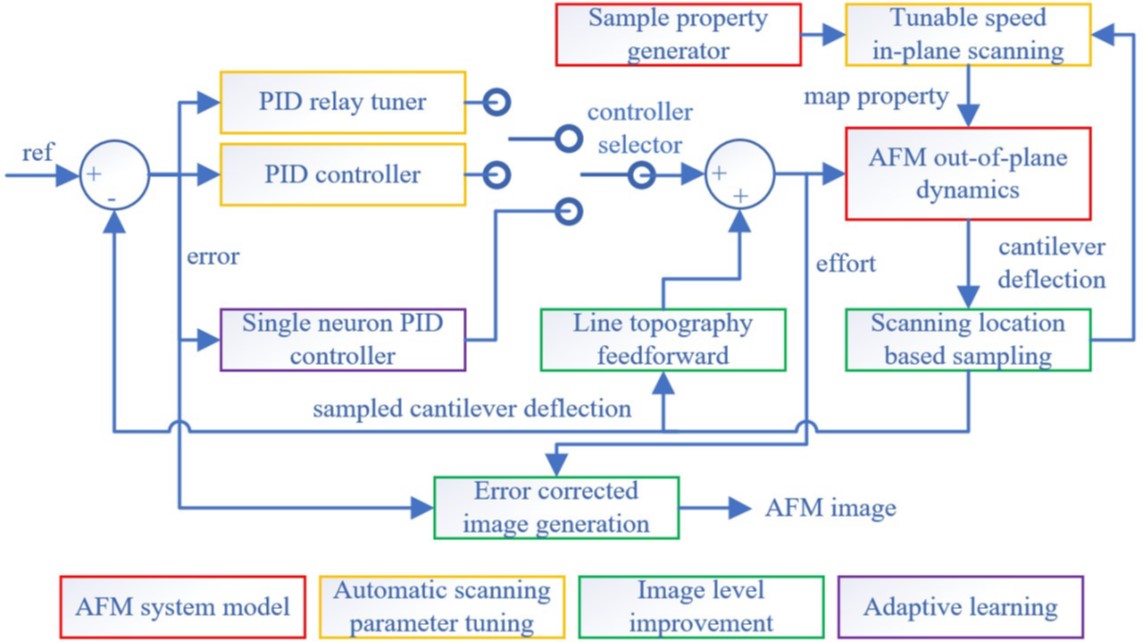
abstract = {Atomic Force Microscope (AFM) is a powerful nano-scale surface measurement instrument. However, significant operator experience is needed for successful imaging. Parameters of the PID controller for probe deflection or oscillation regulation are tuned by the operator based on visual inspection of the trace and retrace tracking performance. With the development of high-speed AFM and for the purpose of operation overhead reduction, automated parameter tuning of the controller is needed. In this work, we propose a unified framework with various control and image generation improvement methods for contact mode AFM, starting first with an automated PID controller tuning and scan speed adjustment method. Second, we discuss three methods to improve imaging performance including location-based sampling, line-based feedforward and error-corrected image generation. Third, in cases where topography variation and material properties are non-uniform across the sample surface, a single neuron PID is designed for model-free adaptive tracking. With a lumped parameter AFM model created in Matlab Simulink, the proposed algorithms are evaluated in simulation to demonstrate their effectiveness. The methods are summarized into a unified framework where methods can be automatically selected after initialization to improve AFM imaging performance.},
keywords = {Control Theory, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
Chen Yang; Nicolas Verbeek; Fangzhou Xia; Yi Wang; Kamal Youcef-Toumi
Modeling and Control of Piezoelectric Hysteresis: A Polynomial-Based Fractional Order Disturbance Compensation Approach Journal Article
In: IEEE Transactions on Industrial Electronics, 2020, ISSN: 1557-9948.
Abstract | Links | BibTeX | Tags: Control Theory, Experimentation, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation
@article{MRL_AFM_Charge_Controller_PBFODC,
title = {Modeling and Control of Piezoelectric Hysteresis: A Polynomial-Based Fractional Order Disturbance Compensation Approach},
author = {Chen Yang and Nicolas Verbeek and Fangzhou Xia and Yi Wang and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/9027124},
doi = {10.1109/TIE.2020.2977567},
issn = {1557-9948},
year = {2020},
date = {2020-03-06},
journal = {IEEE Transactions on Industrial Electronics},
publisher = {IEEE},
abstract = {Piezoelectric hysteresis is a critical issue that significantly degrades the motion accuracy of piezo-actuated nanopositioners. Such an issue is difficult to be precisely modeled and compensated for, primarily due to its asymmetric, rate and input amplitude dependent characteristics. This paper proposes a novel method to deal with this challenge. Specifically, a polynomial-based fractional order disturbance model is proposed to accommodate and characterize the complex hysteresis effect. In this model, the rate dependency is captured by a general method of implementing curve fitting in Bode magnitude plot. The inverse model for control purposes is immediately available from the original one. The proposed method does not require expensive computational resources. In fact, this paper shows that this controller can be easily implemented in an analog manner, which brings the advantages of high-bandwidth and low-cost. Extensive modeling and tracking experiments are carried out to demonstrate the effectiveness of the proposed method. It is shown that the piezoelectric hysteresis nonlinearity can be significantly suppressed over a wide bandwidth.},
keywords = {Control Theory, Experimentation, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {article}
}
Kevin Vanslette; Abdullatif Al Alsheikh; Kamal Youcef-Toumi
Why simple quadrature is just as good as Monte Carlo Journal Article
In: Monte Carlo Methods and Applications, vol. 26, no. 1, pp. 1–16, 2020, ISSN: 1569-3961.
Abstract | Links | BibTeX | Tags: Computational Intelligence, Control Theory, Experimentation, intelligent systems, Modeling; sizing and control for smart grids, Simulation
@article{MRL_AFM_Quadrature_Monte_Carlo,
title = {Why simple quadrature is just as good as Monte Carlo},
author = {Kevin Vanslette and Abdullatif Al Alsheikh and Kamal Youcef-Toumi},
url = {http://dx.doi.org/10.1515/mcma-2020-2055},
doi = {10.1515/mcma-2020-2055},
issn = {1569-3961},
year = {2020},
date = {2020-03-01},
journal = {Monte Carlo Methods and Applications},
volume = {26},
number = {1},
pages = {1–16},
publisher = {Walter de Gruyter GmbH},
abstract = {We motive and calculate Newton–Cotes quadrature integration variance and compare it directly with Monte Carlo (MC) integration variance. We find an equivalence between deterministic quadrature sampling and random MC sampling by noting that MC random sampling is statistically indistinguishable from a method that uses deterministic sampling on a randomly shuffled (permuted) function. We use this statistical equivalence to regularize the form of permissible Bayesian quadrature integration priors such that they are guaranteed to be objectively comparable with MC. This leads to the proof that simple quadrature methods have expected variances that are less than or equal to their corresponding theoretical MC integration variances. Separately, using Bayesian probability theory, we find that the theoretical standard deviations of the unbiased errors of simple Newton–Cotes composite quadrature integrations improve over their worst case errors by an extra dimension independent factor ∝ N−1/2 This dimension independent factor is validated in our simulations.},
keywords = {Computational Intelligence, Control Theory, Experimentation, intelligent systems, Modeling; sizing and control for smart grids, Simulation},
pubstate = {published},
tppubtype = {article}
}
2019

Juan Heredia; Jonathan Tirado; Vladislav Panov; Miguel Altamirano Cabrera; Kamal Youcef-Toumi; Dzmitry Tsetserukou
RecyGlide: A Forearm-Worn Multi-Modal Haptic Display Aimed to Improve User VR Immersion Submission Proceedings Article
In: 25th ACM Symposium on Virtual Reality Software and Technology, pp. 1-2, Association for Computing Machinery, 2019, ISBN: 9781450370011.
Abstract | Links | BibTeX | Tags: Computational Intelligence, Control Theory, Data-driven learning for intelligent machine maintenance, Experimentation, intelligent systems, Mechatronic Design, Simulation, Visualization
@inproceedings{MRL_AFM_VR_Multi_Modal_Display,
title = {RecyGlide: A Forearm-Worn Multi-Modal Haptic Display Aimed to Improve User VR Immersion Submission},
author = {Juan Heredia and Jonathan Tirado and Vladislav Panov and Miguel Altamirano Cabrera and Kamal Youcef-Toumi and Dzmitry Tsetserukou},
url = {https://doi.org/10.1145/3359996.3364759},
doi = {10.1145/3359996.3364759},
isbn = {9781450370011},
year = {2019},
date = {2019-11-01},
booktitle = {25th ACM Symposium on Virtual Reality Software and Technology},
pages = {1-2},
publisher = {Association for Computing Machinery},
abstract = {Haptic devices have been employed to immerse users in VR environments. In particular, hand and finger haptic devices have been deeply developed. However, this type of devices occludes hand detection for some tracking systems, or, for some other tracking systems, it is uncomfortable for the users to wear two different devices (haptic and tracking device) on both hands. We introduce RecyGlide, a novel wearable multimodal display located at the forearm. The RecyGlide is composed of inverted five-bar linkages with 2 degrees of freedom (DoF) and vibration motors (see Fig. 1.(a). The device provides multimodal tactile feedback such as slippage, force vector, pressure, and vibration. We tested the discrimination ability of monomodal and multimodal stimuli patterns on the forearm and confirmed that the multimodal patterns have higher recognition rate. This haptic device was used in VR applications, and we proved that it enhances VR experience and makes it more interactive.},
keywords = {Computational Intelligence, Control Theory, Data-driven learning for intelligent machine maintenance, Experimentation, intelligent systems, Mechatronic Design, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
Kevin Vanslette; Tony Tohme; Kamal Youcef-Toumi
A general model validation and testing tool Journal Article
In: Reliability Engineering & System Safety, vol. 195, pp. 106684, 2019, ISSN: 0951-8320.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Control Theory, Experimentation, intelligent systems, Probabilistic neural networks for robust machine learning, Simulation
@article{MRL_Model_Validation_Testing,
title = {A general model validation and testing tool},
author = {Kevin Vanslette and Tony Tohme and Kamal Youcef-Toumi},
url = {https://www.sciencedirect.com/science/article/pii/S0951832019302571},
doi = {https://doi.org/10.1016/j.ress.2019.106684},
issn = {0951-8320},
year = {2019},
date = {2019-10-28},
journal = {Reliability Engineering & System Safety},
volume = {195},
pages = {106684},
publisher = {Elsevier BV},
abstract = {We construct and propose the “Bayesian Validation Metric” (BVM) as a general model validation and testing tool. We find the BVM to be capable of representing all of the standard validation metrics (square error, reliability, probability of agreement, frequentist, area, probability density comparison, statistical hypothesis testing, and Bayesian model testing) as special cases and find that it can be used to improve, generalize, or further quantify their uncertainties. Thus, the BVM allows us to assess the similarities and differences between existing validation metrics in a new light. The BVM has the capacity to allow users to invent and select models according to novel validation requirements. We formulate and test a few novel compound validation metrics that improve upon other validation metrics in the literature. Further, we construct the BVM Ratio for the purpose of quantifying model selection under user defined definitions of agreement in the presence or absence of uncertainty. This construction generalizes the Bayesian model testing framework.},
keywords = {Algorithms, Computational Intelligence, Control Theory, Experimentation, intelligent systems, Probabilistic neural networks for robust machine learning, Simulation},
pubstate = {published},
tppubtype = {article}
}
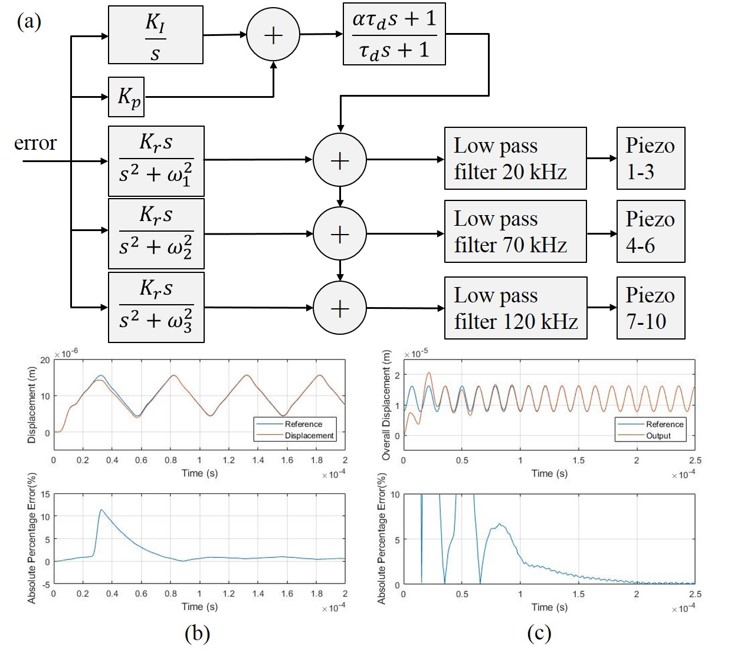
Fangzhou Xia; Chen Yang; Yi Wang; Kamal Youcef-Toumi
Bandwidth Based Repetitive Controller Design for a Modular Multi-actuated AFM Scanner Proceedings Article
In: 2019 American Control Conference (ACC), pp. 3776–3781, IEEE IEEE, 2019.
Abstract | Links | BibTeX | Tags: Control Theory, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation
@inproceedings{MRL_AFM_Bandwidth_Based_Repetitive_Control,
title = {Bandwidth Based Repetitive Controller Design for a Modular Multi-actuated AFM Scanner},
author = {Fangzhou Xia and Chen Yang and Yi Wang and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/8814642},
doi = {10.23919/ACC.2019.8814642},
year = {2019},
date = {2019-08-29},
booktitle = {2019 American Control Conference (ACC)},
pages = {3776--3781},
publisher = {IEEE},
organization = {IEEE},
abstract = {High-Speed Atomic Force Micrscopy (HSAFM) enables visualization of dynamic processes and helps with understanding of fundamental behaviors at the nano-scale. Ideally, the HSAFM video frames should have high fidelity, high resolution, and a wide scanning range. Unfortunately, it is very difficult for scanners to simultaneously achieve high scanning bandwidth and large range. Since the first bending mode of large piezos is a major limiting factor, we propose an alternative design by stacking multiple short range piezo actuators. This approach allows significant increase of scanner bandwidth (over 20 kHz) while maintaining large travel range (over 20 μm). The modular design also facilitates the easy adjustment of scanner travel range. In this paper, we first discuss the design and assembly of this scanner. We then present the modeling and control of this multi-actuated scanner. A comparative study is then given on the performance of different controllers. These include a PID controller, a LQR based controller and a bandwidth based repetitive controller. The proposed algorithm provides significant improvement in tracking performance when utilized with the scanner using optimized input trajectories.},
keywords = {Control Theory, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
Erik Gest; Mikio Furokawa; Takayuki Hirano; Kamal Youcef-Toumi
Design of Versatile and Low-Cost Shaft Sensor for Health Monitoring Proceedings Article
In: pp. 1926-1932, IEEE IEEE, 2019, ISBN: 978-1-5386-6027-0.
Abstract | Links | BibTeX | Tags: Control Theory, Data-driven learning for intelligent machine maintenance, Experimentation, Fabrication, Instrumentation, intelligent systems, Physical System Modeling, Simulation
@inproceedings{MRL_AFM_Shaft_Sensor_Health_Monitoring,
title = {Design of Versatile and Low-Cost Shaft Sensor for Health Monitoring},
author = {Erik Gest and Mikio Furokawa and Takayuki Hirano and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/8794408},
doi = {10.1109/ICRA.2019.8794408},
isbn = {978-1-5386-6027-0},
year = {2019},
date = {2019-08-12},
pages = {1926-1932},
publisher = {IEEE},
organization = {IEEE},
abstract = {Virtually every mechanized form of transportation, power generation system, industrial equipment, and robotic system has rotating shafts. As the shaft is often the main means of mechanical power transmission, measuring the torque, speed, vibration, and bending of the shaft can be used in many cases to access device performance and health and to implement controls. This paper proposes a shaft sensor that measures all of these phenomena with reasonable accuracy while having a low cost and simple installation process. This sensor transfers strain from the shaft and amplifies it to increase sensitivity. Furthermore, this sensor requires no components to be in the stationary reference frame, allowing the entire device to rotate with the shaft. A prototype is presented. Experimental results illustrate the effectiveness of the proposed system.},
keywords = {Control Theory, Data-driven learning for intelligent machine maintenance, Experimentation, Fabrication, Instrumentation, intelligent systems, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
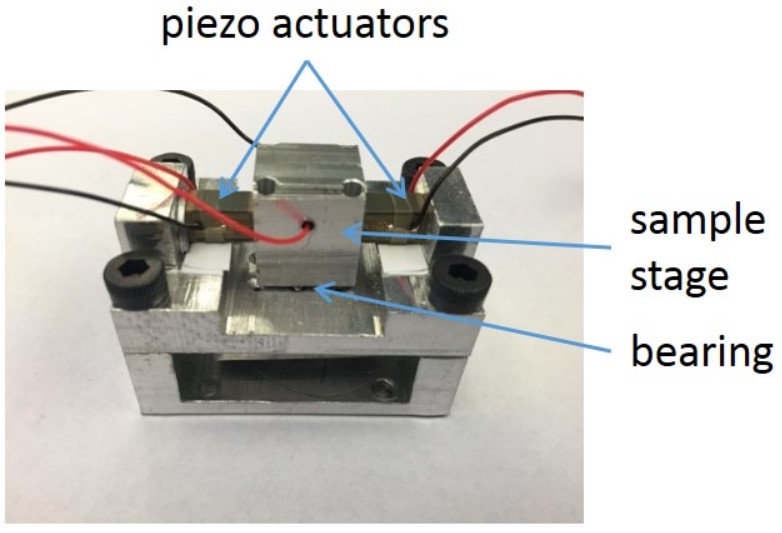
C Yang; F Xia; Y Wang; S Truncale; K Youcef-Toumi
Design and Control of a Multi-Actuated Nanopositioning Stage with Stacked Structure Proceedings Article
In: 2019 American Control Conference (ACC), pp. 3782-3788, IEEE, 2019, ISSN: 2378-5861.
Abstract | Links | BibTeX | Tags: Control Theory, Direct-drive robots for laser cutting manufacturing, Fabrication, Instrumentation, Mechatronic Design, Robotics & Automation
@inproceedings{MRL_AFM_Nanopositioning_Stage_Stacked,
title = {Design and Control of a Multi-Actuated Nanopositioning Stage with Stacked Structure},
author = {C Yang and F Xia and Y Wang and S Truncale and K Youcef-Toumi},
doi = {10.23919/ACC.2019.8815299},
issn = {2378-5861},
year = {2019},
date = {2019-07-12},
booktitle = {2019 American Control Conference (ACC)},
journal = {xplore},
pages = {3782-3788},
publisher = {IEEE},
abstract = {A novel multi-actuated nanopositioning stage with stacked structure has been developed. The aim is to achieve both high bandwidth and large motion range. Symmetric flexures are designed to obtain equal stiffness along any direction in the lateral plane. With this design, the lateral stiffness and corresponding bending mode resonance frequency can be optimized. Both analytical model and finite element analysis are employed to predict the dominant resonance frequency. Experimental results indicate that the dominant resonance of nanopositioner is at 28.2 kHz, with a motion range of 16.5J.1m. A disturbance-observer-based controller is implemented to suppress the hysteretic nonlinearity. The new design and control system enable high-bandwidth and high-precision nanopositioning up to 2 kHz.},
keywords = {Control Theory, Direct-drive robots for laser cutting manufacturing, Fabrication, Instrumentation, Mechatronic Design, Robotics & Automation},
pubstate = {published},
tppubtype = {inproceedings}
}
2018

Chen Yang; Changle Li; Fangzhou Xia; Yanhe Zhu; Jie Zhao; Kamal Youcef-Toumi
Charge Controller With Decoupled and Self-Compensating Configurations for Linear Operation of Piezoelectric Actuators in a Wide Bandwidth Journal Article
In: IEEE Transactions on Industrial Electronics, vol. 66, no. 7, pp. 5392–5402, 2018.
Abstract | Links | BibTeX | Tags: Control Theory, Experimentation, Instrumentation, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation
@article{MRL_AFM_Charge_Controller_Self_Compensating,
title = {Charge Controller With Decoupled and Self-Compensating Configurations for Linear Operation of Piezoelectric Actuators in a Wide Bandwidth},
author = {Chen Yang and Changle Li and Fangzhou Xia and Yanhe Zhu and Jie Zhao and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/8466119},
doi = {10.1109/TIE.2018.2868321},
year = {2018},
date = {2018-09-14},
journal = {IEEE Transactions on Industrial Electronics},
volume = {66},
number = {7},
pages = {5392--5402},
publisher = {IEEE},
abstract = {Charge control is a well-known sensorless approach to operate piezoelectric actuators, which has been proposed for more than 30 years. However, it is rarely used in industry because the implemented controllers suffer from the issues of limited low-frequency performance, long settling time, floating-load, and loss of stroke, etc. In this paper, a novel controller circuit dedicated to overcome these issues is presented. In the proposed scheme, a grounded-load charge controller with decoupled configuration is developed, which separates high-frequency and low-frequency paths, thus achieving arbitrarily low transition frequency without increasing the settling time. Based on this, a self-compensating configuration is further proposed and integrated into the controller circuit, which makes full use of controller output to improve its own control performance at low frequencies. Experimental results show that the presented charge controller can effectively reduce more than 88% of the hysteretic nonlinearity even when operating close to the transition frequency. To demonstrate its practical value, we then integrate it into a custom-designed high-speed atomic force microscope system. By comparing images obtained from using voltage drive and charge controller, it is clear that the piezoelectric hysteresis has been significantly reduced in a wide bandwidth.},
keywords = {Control Theory, Experimentation, Instrumentation, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {article}
}
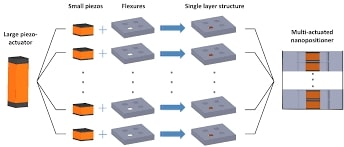
Fangzhou Xia; Stephen Truncale; Yi Wang; Kamal Youcef-Toumi
Design and Control of a Multi-actuated High-bandwidth and Large-range Scanner for Atomic Force Microscopy Proceedings Article
In: 2018 Annual American Control Conference (ACC), pp. 4330–4335, IEEE IEEE, 2018.
Abstract | Links | BibTeX | Tags: Control Theory, Experimentation, Fabrication, Instrumentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation
@inproceedings{MRL_AFM_Dual_Actuated_Scanner,
title = {Design and Control of a Multi-actuated High-bandwidth and Large-range Scanner for Atomic Force Microscopy},
author = {Fangzhou Xia and Stephen Truncale and Yi Wang and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/8431801},
doi = {10.23919/ACC.2018.8431801},
year = {2018},
date = {2018-08-16},
booktitle = {2018 Annual American Control Conference (ACC)},
pages = {4330--4335},
publisher = {IEEE},
organization = {IEEE},
abstract = {Atomic force microscopes (AFMs) with high-speed and large-range capabilities open up possibilities for many new applications. It is desirable to have a large scanning range along with zooming ability to obtain high resolution and high frame-rate imaging. Such capabilities will increase the imaging throughput and allow more sophisticated observations at the nanoscale. Unfortunately, in-plane scanning of conventional piezo tube scanners typically covers a large range of hundreds of microns but has limited bandwidth up to several hundred Hertz. The main focus of this paper is the multi-actuated piezo scanner design and control algorithm to achieve high-speed tracking. Three design strategies for structure bandwidth and operational range consideration are presented and evaluated. The non-linear hysteresis effect of the piezo actuators is modeled using the Preisach hysteresis model. PID control, iterative learning control and repetitive control strategies were investigated in simulation. Based on the controllers performance, the repetitive controller is implemented on a high-speed FPGA device and experimentally verified. The new AFM scanner design is capable of 10 kHz tracking at 3 μm range and 200 Hz tracking at 100 μm range.},
keywords = {Control Theory, Experimentation, Fabrication, Instrumentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
2017
L Yang; I Paranawithana; K Youcef-Toumi; U Tan
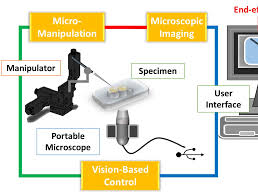
Automatic Vision-Guided Micromanipulation for Versatile Deployment and Portable Setup Journal Article
In: IEEE Transactions on Automation Science and Engineering, vol. 15, no. 4, pp. 1609-1620, 2017, ISSN: 1558-3783.
Abstract | Links | BibTeX | Tags: Control Theory, Mechatronic Design, Physical System Modeling, Robot operated modular fixtures, Robotics & Automation
@article{MRL_AFM_Automatic_Micromanipulation,
title = {Automatic Vision-Guided Micromanipulation for Versatile Deployment and Portable Setup},
author = {L Yang and I Paranawithana and K Youcef-Toumi and U Tan},
doi = {10.1109/TASE.2017.2754517},
issn = {1558-3783},
year = {2017},
date = {2017-10-23},
journal = {IEEE Transactions on Automation Science and Engineering},
volume = {15},
number = {4},
pages = {1609-1620},
publisher = {IEEE},
abstract = {In this paper, an automatic vision-guided micromanipulation approach to facilitate versatile deployment and portable setup is proposed. This paper is motivated by the importance of micromanipulation and the limitations in existing automation technology in micromanipulation. Despite significant advancements in micromanipulation techniques, there remain bottlenecks in integrating and adopting automation for this application. An underlying reason for the gaps is the difficulty in deploying and setting up such systems. To address this, we identified two important design requirements, namely, portability and versatility of the micromanipulation platform. A self-contained vision-guided approach requiring no complicated preparation or setup is proposed. This is achieved through an uncalibrated self-initializing workflow algorithm also capable of assisted targeting. The feasibility of the solution is demonstrated on a low-cost portable microscope camera and compact actuated microstages. Results suggest subpixel accuracy in localizing the tool tip during initialization steps. The self-focus mechanism could recover intentional blurring of the tip by autonomously manipulating it 95.3% closer to the focal plane. The average error in visual servo is less than a pixel with our depth compensation mechanism showing better maintaining of similarity score in tracking. Cell detection rate in a 1637-frame video stream is 97.7% with subpixels localization uncertainty. Our work addresses the gaps in existing automation technology in the application of robotic vision-guided micromanipulation and potentially contributes to the way cell manipulation is performed.},
keywords = {Control Theory, Mechatronic Design, Physical System Modeling, Robot operated modular fixtures, Robotics & Automation},
pubstate = {published},
tppubtype = {article}
}
Fangzhou Xia; Iman Soltani Bozchalooi; Kamal Youcef-Toumi
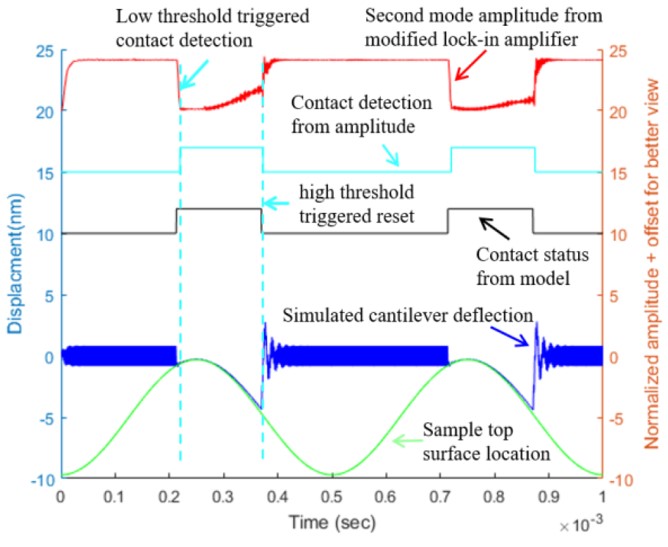
Induced Vibration Contact Detection for Minimizing Cantilever Tip-Sample Interaction Forces in Jumping Mode Atomic Force Microscopy Proceedings Article
In: 2017 American Control Conference (ACC), pp. 4141–4146, IEEE IEEE, 2017, ISBN: 978-1-5090-5992-8.
Abstract | Links | BibTeX | Tags: Algorithms, Control Theory, Experimentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation
@inproceedings{MRL_AFM_IVCD,
title = {Induced Vibration Contact Detection for Minimizing Cantilever Tip-Sample Interaction Forces in Jumping Mode Atomic Force Microscopy},
author = {Fangzhou Xia and Iman Soltani Bozchalooi and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/7963591},
doi = {10.23919/ACC.2017.7963591},
isbn = {978-1-5090-5992-8},
year = {2017},
date = {2017-07-03},
booktitle = {2017 American Control Conference (ACC)},
pages = {4141--4146},
publisher = {IEEE},
organization = {IEEE},
abstract = {Minimizing tip-sample interaction force is crucial for the performance of atomic force microscopes when imaging delicate samples. Conventional methods based on jumping mode such as peak force tapping require a prescribed maximum interaction force to detect tip-sample contact. However, due to the presence of drag forces (in aqueous environments), noises and cantilever dynamics, the minimal detectable peak force can be large. This results in large tip-sample interaction forces and hence sample damage. To minimize this force, we propose a method based on induction of surface or probe vibrations to detect contact between cantilever probe tip and sample substrate. To illustrate the effectiveness of the method, we report experimental results for contact detection on a PS-LDPE-12M polymer sample. A topography tracking control algorithm based on the proposed contact detection scheme is also presented.},
keywords = {Algorithms, Control Theory, Experimentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
2016
Bo Jiang; Aramazd Muzhikyan; Amro M Farid; Kamal Youcef-Toumi
Demand side management in power grid enterprise control: A comparison of industrial & social welfare approaches Journal Article
In: Applied Energy, vol. 187, pp. 833-846, 2016, ISSN: 0306-2619.
Abstract | Links | BibTeX | Tags: Algorithms, Control Theory, Experimentation, Robot operated modular fixtures, Robotics & Automation, Simulation
@article{MRL_AFM_Comparison_Industrial_Social_Welfare,
title = {Demand side management in power grid enterprise control: A comparison of industrial & social welfare approaches},
author = {Bo Jiang and Aramazd Muzhikyan and Amro M Farid and Kamal Youcef-Toumi},
url = {https://www.sciencedirect.com/science/article/pii/S0306261916315410},
doi = {https://doi.org/10.1016/j.apenergy.2016.10.096},
issn = {0306-2619},
year = {2016},
date = {2016-10-25},
journal = {Applied Energy},
volume = {187},
pages = {833-846},
publisher = {ScienceDirect},
abstract = {Despite the recognized importance of demand side management (DSM) for mitigating the impact of variable energy resources and reducing the system costs, the academic and industrial literature have taken divergent approaches to DSM implementation. The prequel to this paper has demonstrated that the netload baseline inflation – a feature particular to the industrial DSM unit commitment formulation – leads to higher and costlier day-ahead scheduling compared to the academic social welfare method. This paper now expands this analysis from a single optimization problem to the full power grid enterprise control with its multiple control layers at their associated time scales. These include unit commitment, economic dispatch and regulation services. It compares the two DSM formulations and quantifies the technical and economic impacts of industrial baseline errors in the day-ahead and real-time markets. The paper concludes that the presence of baseline errors – present only in the industrial model – leads to a cascade of additional system imbalances and costs as compared to the social welfare model. A baseline error introduced in the unit commitment problem will increase costs not just in the day-ahead market, but will also introduce a greater netload error residual in the real-time market causing additional cost and imbalances. These imbalances if left unmitigated degrade system reliability or otherwise require costly regulating reserves to achieve the same performance. An additional baseline error introduced in the economic dispatch further compounds this cascading effect with additional costs in the real-time market, amplified downstream imbalances, and further regulation capacity for its mitigation.},
keywords = {Algorithms, Control Theory, Experimentation, Robot operated modular fixtures, Robotics & Automation, Simulation},
pubstate = {published},
tppubtype = {article}
}
Iman Soltani Bozchalooi; Andrew Careaga Houck; Jwaher M. AlGhamdi; Kamal Youcef-Toumi
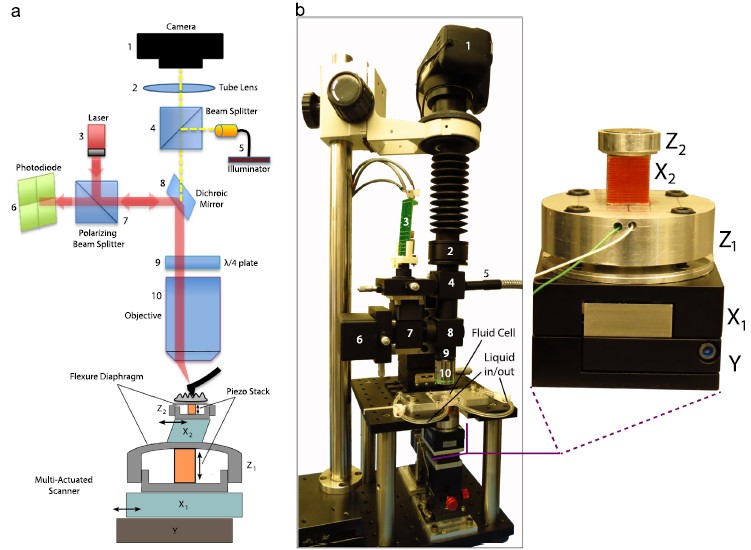
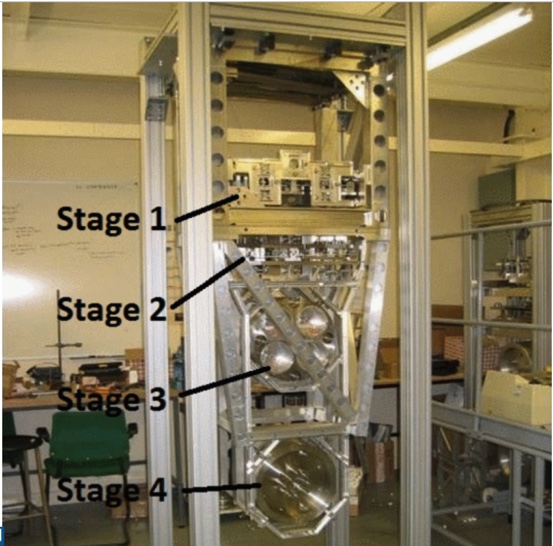
Design and control of multi-actuated atomic force microscope for large-range and high-speed imaging Journal Article
In: vol. 160, pp. 213 - 224, 2016, ISSN: 0304-3991.
Abstract | Links | BibTeX | Tags: Control Theory, Experimentation, Fabrication, Instrumentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Simulation, Visualization
@article{MRL_AFM_LRHS_imaging,
title = {Design and control of multi-actuated atomic force microscope for large-range and high-speed imaging},
author = {Iman Soltani Bozchalooi and Andrew Careaga Houck and Jwaher M. AlGhamdi and Kamal Youcef-Toumi},
url = {http://www.sciencedirect.com/science/article/pii/S0304399115300528 https://www.youtube.com/watch?v=PQ-zE6wA61c},
doi = {https://doi.org/10.1016/j.ultramic.2015.10.016},
issn = {0304-3991},
year = {2016},
date = {2016-01-01},
volume = {160},
pages = {213 - 224},
abstract = {This paper presents the design and control of a high-speed and large-range atomic force microscopy (AFM). A multi-actuation scheme is proposed where several nano-positioners cooperate to achieve the range and speed requirements. A simple data-based control design methodology is presented to effectively operate the AFM scanner components. The proposed controllers compensate for the coupled dynamics and divide the positioning responsibilities between the scanner components. As a result, the multi-actuated scanner behavior is equivalent to that of a single X–Y–Z positioner with large range and high speed. The scanner of the designed AFM is composed of five nano-positioners, features 6μm out-of-plane and 120μm lateral ranges and is capable of high-speed operation. The presented AFM has a modular design with laser spot size of 3.5μm suitable for small cantilever, an optical view of the sample and probe, a conveniently large waterproof sample stage and a 20MHz data throughput for high resolution image acquisition at high imaging speeds. This AFM is used to visualize etching of calcite in a solution of sulfuric acid. Layer-by-layer dissolution and pit formation along the crystalline lines in a low pH environment is observed in real time.},
keywords = {Control Theory, Experimentation, Fabrication, Instrumentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Simulation, Visualization},
pubstate = {published},
tppubtype = {article}
}
Aramazd Muzhikyan; Amro M Farid; Kamal Youcef-Toumi
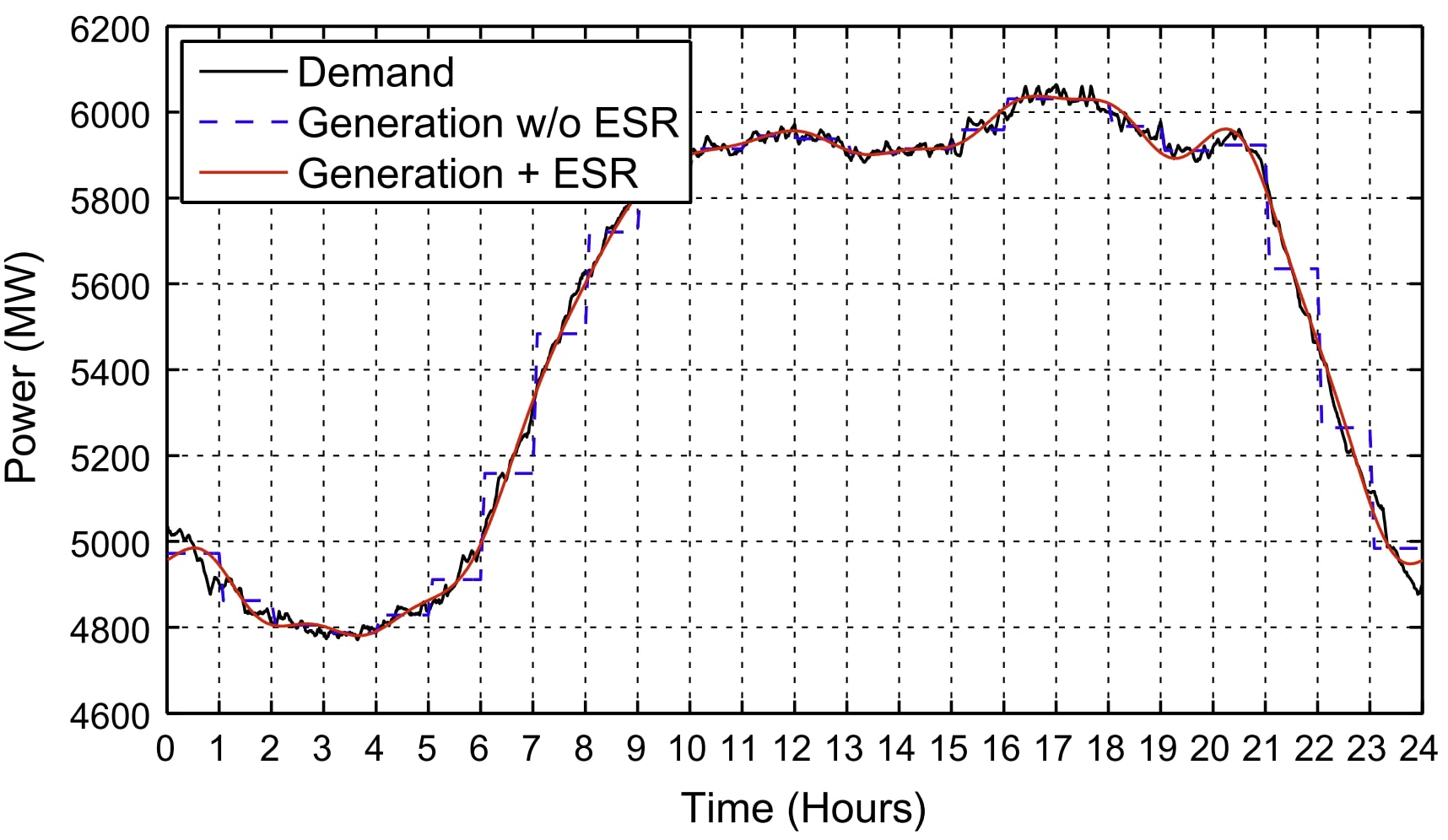
Relative merits of load following reserves & energy storage market integration towards power system imbalances Journal Article
In: International Journal of Electrical Power & Energy Systems, vol. 74, pp. 222-229, 2016, ISSN: 0142-0615.
Abstract | Links | BibTeX | Tags: Control Theory, intelligent systems, Modeling; sizing and control for smart grids, Visualization
@article{MRL_Market_Integration_Power_System,
title = {Relative merits of load following reserves & energy storage market integration towards power system imbalances},
author = {Aramazd Muzhikyan and Amro M Farid and Kamal Youcef-Toumi},
url = {https://www.sciencedirect.com/science/article/pii/S0142061515002999},
doi = {https://doi.org/10.1016/j.ijepes.2015.07.013},
issn = {0142-0615},
year = {2016},
date = {2016-01-01},
journal = {International Journal of Electrical Power & Energy Systems},
volume = {74},
pages = {222-229},
publisher = {ScienceDirect},
abstract = {Traditionally, power system balancing operations consist of three consecutive control techniques, namely security-constrained unit commitment (SCUC), security-constrained economic dispatch (SCED), and automatic generation control (AGC). Each of these have their corresponding type of operating reserves. Similarly, energy storage resources (ESRs) may be integrated as energy, load following, or regulation resources. A review of the existing literature shows that most ESR integration studies are focused on a single control function. In contrast, recent work on renewable energy integration has employed the concept of enterprise control where the multiple layers of balancing operations have been integrated into a single model. This paper now uses such an enterprise control model to demonstrate the relative merits of load following reserves and energy storage integrated into the resource scheduling and balancing action layers. The results show that load following reserves and energy storage resources mitigate imbalances in fundamentally different ways. The latter becomes an increasingly effective balancing resource for high net-load variability and small day-ahead market time step.},
keywords = {Control Theory, intelligent systems, Modeling; sizing and control for smart grids, Visualization},
pubstate = {published},
tppubtype = {article}
}
2015
Amro M Farid; Bo Jiang; Aramazd Muzhikyan; Kamal Youcef-Toumi
The need for holistic enterprise control assessment methods for the future electricity grid Journal Article
In: Renewable and Sustainable Energy Reviews, vol. 56, pp. 669-685, 2015, ISSN: 1364-0321.
Abstract | Links | BibTeX | Tags: Algorithms, Control Theory, Experimentation, intelligent systems, Modeling; sizing and control for smart grids, Physical System Modeling, Simulation
@article{MRL_AFM_Holistic_Assessment_Electricity_Grid,
title = {The need for holistic enterprise control assessment methods for the future electricity grid},
author = {Amro M Farid and Bo Jiang and Aramazd Muzhikyan and Kamal Youcef-Toumi},
url = {https://www.sciencedirect.com/science/article/pii/S1364032115012599},
doi = {https://doi.org/10.1016/j.rser.2015.11.007},
issn = {1364-0321},
year = {2015},
date = {2015-12-17},
journal = {Renewable and Sustainable Energy Reviews},
volume = {56},
pages = {669-685},
publisher = {elsevier},
abstract = {Recently, the academic and industrial literature has coalesced around an enhanced vision of the electric power grid that is responsive, dynamic, adaptive and flexible. As driven by decarbonization, reliability, transportation electrification, consumer participation and deregulation, this future grid will undergo technical, economic and regulatory changes to bring about the incorporation of renewable energy and incentivized demand side management and control. As a result, the power grid will experience fundamental changes in its physical system structure and behavior that will consequently require enhanced and integrated control, automation, and IT-driven management functions in what is called enterprise control. While these requirements will open a plethora of opportunities for new control technologies, many of these solutions are largely overlapping in function. Their overall contribution to holistic techno-economic control objectives and their underlying dynamic properties are less than clear. Piece-meal integration and a lack of coordinated assessment could bring about costly-overbuilt solutions or even worse unintended reliability consequences. This work, thus, reviews these existing trends in the power grid evolution. It then motivates the need for holistic methods of integrated assessment that manage the diversity of control solutions against their many competing objectives and contrasts these requirements to existing variable energy resource integration studies. The work concludes with a holistic framework for “enterprise control” assessment of the future power grid and suggests directions for future work.},
keywords = {Algorithms, Control Theory, Experimentation, intelligent systems, Modeling; sizing and control for smart grids, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {article}
}
Bo Jiang; Amro M Farid; Kamal Youcef-Toumi
Impacts of Industrial Baseline Errors on Costs and Social Welfare in the Demand Side Management of Day-Ahead Wholesale Markets Proceedings Article
In: ASME 2015 13th International Conference on Fuel Cell Science, Engineering and Technology, and the ASME 2015 Nuclear Forum, pp. 7390-7395, IEEE IEEE, 2015, ISSN: 1558-3783.
Abstract | Links | BibTeX | Tags: Control Theory, Experimentation, Nanotechnology, Physical System Modeling, Simulation, Visualization
@inproceedings{MRL_WDP_Pipe_Leak_Repair,
title = {Impacts of Industrial Baseline Errors on Costs and Social Welfare in the Demand Side Management of Day-Ahead Wholesale Markets},
author = {Bo Jiang and Amro M Farid and Kamal Youcef-Toumi},
url = {https://asmedigitalcollection.asme.org/ES/proceedings/ES2015/56857/V002T12A003/230063},
doi = {https://doi.org/10.1115/ES2015-49459},
issn = {1558-3783},
year = {2015},
date = {2015-10-27},
booktitle = {ASME 2015 13th International Conference on Fuel Cell Science, Engineering and Technology, and the ASME 2015 Nuclear Forum},
journal = {IEEE Transactions on Automation Science and Engineering},
volume = {15},
number = {4},
pages = {7390-7395},
publisher = {IEEE},
organization = {IEEE},
abstract = {Demand Side Management (DSM},
keywords = {Control Theory, Experimentation, Nanotechnology, Physical System Modeling, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
A Muzhikyan; A M Farid; K Youcef-Toumi
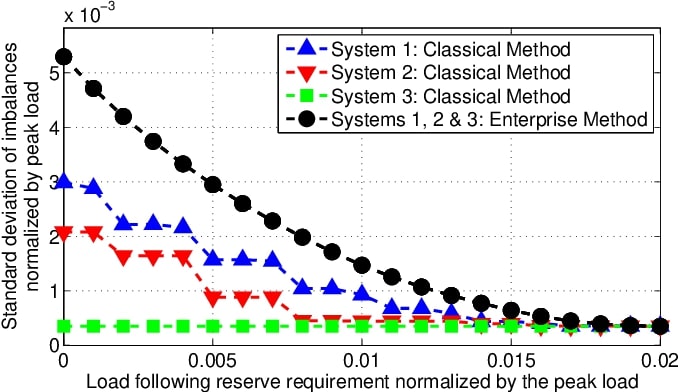
An Enterprise Control Assessment Method for Variable Energy Resource-Induced Power System Imbalances—Part II: Parametric Sensitivity Analysis Journal Article
In: IEEE Transactions on Industrial Electronics, vol. 62, no. 4, pp. 2459-2467, 2015, ISSN: 1557-9948.
Abstract | Links | BibTeX | Tags: Algorithms, Control Theory, intelligent systems, Modeling, Simulation, sizing and control of smart grids
@article{MRL_AFM_Enterprise_Control_Assessment,
title = {An Enterprise Control Assessment Method for Variable Energy Resource-Induced Power System Imbalances—Part II: Parametric Sensitivity Analysis},
author = {A Muzhikyan and A M Farid and K Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/7018074?denied=},
doi = {10.1109/TIE.2015.2395380},
issn = {1557-9948},
year = {2015},
date = {2015-01-22},
journal = {IEEE Transactions on Industrial Electronics},
volume = {62},
number = {4},
pages = {2459-2467},
publisher = {IEEE},
abstract = {In recent years, renewable energy has developed to address energy security and climate change drivers. However, as energy resources, they possess a variable and uncertain nature that significantly complicates grid balancing operations. As a result, an extensive academic and industrial literature has developed to determine how much such variable energy resources (VERs) may be integrated and how to best mitigate their impacts. While certainly insightful with the context of their application, many integration studies have methodological limitations because they are case specific, address a single control function of the power grid balancing operations, and are often not validated by simulation. The prequel to this paper presented a holistic method for the assessment of power grid imbalances induced by VERs based upon the concept of enterprise control. This paper now systematically studies these power grid imbalances in terms of five independent variables: 1) day-ahead market time step; 2) real-time market time step; 3) VER normalized variability; 4) normalized day-ahead VER forecast error; and 5) normalized short-term VER forecast error. The systematic study elucidates the impacts of these variables and provides significant insights as to how planners should address these independent variables in the future.},
keywords = {Algorithms, Control Theory, intelligent systems, Modeling, Simulation, sizing and control of smart grids},
pubstate = {published},
tppubtype = {article}
}
2014

David Donghyun Kim; You Wu; Antoine Noel; Kamal Youcef-Toumi
RIM Propeller for Micro Autonomous Underwater Vehicles Proceedings Article
In: ASME 2014 Dynamic Systems and Control Conference, ASME ASME, 2014, ISBN: 978-0-7918-4620-9.
Abstract | Links | BibTeX | Tags: Computer vision for autonomous vehicle sensing, Control Theory, Experimentation, Fabrication, intelligent systems, Mechatronic Design, Simulation
@inproceedings{MRL_AVS_AUV_RIM_Control,
title = {RIM Propeller for Micro Autonomous Underwater Vehicles},
author = {David Donghyun Kim and You Wu and Antoine Noel and Kamal Youcef-Toumi},
url = {https://asmedigitalcollection.asme.org/DSCC/proceedings/DSCC2014/46209/V003T44A005/229722},
doi = {10.1115/DSCC2014-6282},
isbn = {978-0-7918-4620-9},
year = {2014},
date = {2014-12-19},
booktitle = {ASME 2014 Dynamic Systems and Control Conference},
publisher = {ASME},
organization = {ASME},
abstract = {Micro autonomous underwater vehicles (AUVs) need small-scale, powerful and safe propulsion systems especially when they are performing missions in pipes and other confined environments. However, the most conventional propulsion systems do not satisfy all three requirements: small, powerful and safe. A micro propulsion system meeting those requirements are developed based on the RIM propeller concept. It is compact and powerful; the complete motor-propeller assembly is 33mm in diameter, 12mm in depth and 16g in weight, and it is capable of producing 0.4N thrust in static water given a 7.1W power input. The paper presents the design, manufacturing and integration of the micro RIM propeller in an AUV.},
keywords = {Computer vision for autonomous vehicle sensing, Control Theory, Experimentation, Fabrication, intelligent systems, Mechatronic Design, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
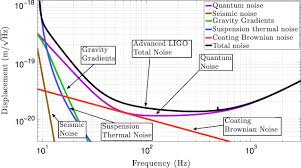
B N Shapiro; R Adhikari; J Driggers; J Kissel; B Lantz; J Rollins; K Youcef-Toumi
Noise and control decoupling of Advanced LIGO suspensions Journal Article
In: Classical and Quantum Gravity, vol. 32, no. 1, pp. 015004, 2014.
Abstract | Links | BibTeX | Tags: Control Theory, Experimentation, intelligent systems, Physical System Modeling, Simulation, Uncertainty estimation and calibration for modeling, Visualization
@article{MRL_AFM_Noise_Control_Decoupling,
title = {Noise and control decoupling of Advanced LIGO suspensions},
author = {B N Shapiro and R Adhikari and J Driggers and J Kissel and B Lantz and J Rollins and K Youcef-Toumi},
url = {https://doi.org/10.1088/0264-9381/32/1/015004},
doi = {10.1088/0264-9381/32/1/015004},
year = {2014},
date = {2014-12-10},
journal = {Classical and Quantum Gravity},
volume = {32},
number = {1},
pages = {015004},
publisher = {IOP Publishing},
abstract = {Ground-based interferometric gravitational wave observatories such as Advanced LIGO must isolate their optics from ground vibrations with suspension systems to meet their stringent noise requirements. These suspensions typically have very high quality-factor resonances that require active damping. The sensor noise associated with this damping is a potential significant contributor to the sensitivity of these interferometers. This paper introduces a novel scheme for suspension damping that isolates much of this noise and permits greater amounts of damping. It also decouples the damping feedback design from the interferometer control. The scheme works by invoking a change from a local coordinate frame associated with each suspension, to a coordinate frame aligned with the interferometric readout. In this way, degrees of freedom invisible to the readout can employ effective, but noisy damping. The degree of freedom measured by the readout is then damped using low noise interferometer signals, eliminating the need to use the usual noisy sensors. Simulated and experimental results validate the concepts presented in this paper.},
keywords = {Control Theory, Experimentation, intelligent systems, Physical System Modeling, Simulation, Uncertainty estimation and calibration for modeling, Visualization},
pubstate = {published},
tppubtype = {article}
}
Reshma C Francy; Amro M Farid; Kamal Youcef-Toumi
Event triggered state estimation techniques for power systems with integrated variable energy resources Journal Article
In: ISA transactions, vol. 56, pp. 165—172, 2014, ISSN: 0019-0578.
Abstract | Links | BibTeX | Tags: Control Theory, Experimentation, intelligent systems, Modeling; sizing and control for smart grids, Physical System Modeling, Simulation
@article{MRL_AFM_State_Estimation_Power,
title = {Event triggered state estimation techniques for power systems with integrated variable energy resources},
author = {Reshma C Francy and Amro M Farid and Kamal Youcef-Toumi},
url = {https://doi.org/10.1016/j.isatra.2014.11.001},
doi = {10.1016/j.isatra.2014.11.001},
issn = {0019-0578},
year = {2014},
date = {2014-11-24},
journal = {ISA transactions},
volume = {56},
pages = {165—172},
abstract = {For many decades, state estimation (SE) has been a critical technology for energy management systems utilized by power system operators. Over time, it has become a mature technology that provides an accurate representation of system state under fairly stable and well understood system operation. The integration of variable energy resources (VERs) such as wind and solar generation, however, introduces new fast frequency dynamics and uncertainties into the system. Furthermore, such renewable energy is often integrated into the distribution system thus requiring real-time monitoring all the way to the periphery of the power grid topology and not just the (central) transmission system. The conventional solution is two fold: solve the SE problem (1) at a faster rate in accordance with the newly added VER dynamics and (2) for the entire power grid topology including the transmission and distribution systems. Such an approach results in exponentially growing problem sets which need to be solver at faster rates. This work seeks to address these two simultaneous requirements and builds upon two recent SE methods which incorporate event-triggering such that the state estimator is only called in the case of considerable novelty in the evolution of the system state. The first method incorporates only event-triggering while the second adds the concept of tracking. Both SE methods are demonstrated on the standard IEEE 14-bus system and the results are observed for a specific bus for two difference scenarios: (1) a spike in the wind power injection and (2) ramp events with higher variability. Relative to traditional state estimation, the numerical case studies showed that the proposed methods can result in computational time reductions of 90. These results were supported by a theoretical discussion of the computational complexity of three SE techniques. The work concludes that the proposed SE techniques demonstrate practical improvements to the computational complexity of classical state estimation. In such a way, state estimation can continue to support the necessary control actions to mitigate the imbalances resulting from the uncertainties in renewables.},
keywords = {Control Theory, Experimentation, intelligent systems, Modeling; sizing and control for smart grids, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {article}
}
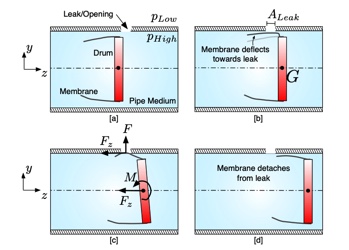
Dimitris Chatzigeorgiou; Kamal Youcef-Toumi; Rached Ben-Mansour
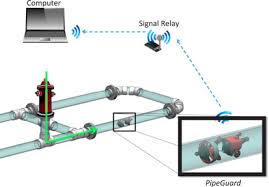
Detection estimation algorithms for in-pipe leak detection Proceedings Article
In: 2014 American Control Conference, pp. 5508-5514, 2014, ISBN: 978-1-4799-3274-0.
Abstract | Links | BibTeX | Tags: Algorithms, Control Theory, Experimentation, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics and Automation, Simulation
@inproceedings{MRL_WDP_Estimation_Algorithms,
title = {Detection estimation algorithms for in-pipe leak detection},
author = {Dimitris Chatzigeorgiou and Kamal Youcef-Toumi and Rached Ben-Mansour},
url = {https://ieeexplore.ieee.org/document/6859203},
doi = {10.1109/ACC.2014.6859203},
isbn = {978-1-4799-3274-0},
year = {2014},
date = {2014-07-21},
booktitle = {2014 American Control Conference},
pages = {5508-5514},
abstract = {Leakage is the most important factor for unaccounted losses in any pipe network around the world. However, most state of the art leak detection systems have limited applicability, lack in reliability and/or depend on user experience for data interpretation. In this paper we present a new, autonomous, in-pipe, leak detection system. The detection principle is based on the presence of a pressure gradient in the neighborhood of a leak in a pressurized pipe. This phenomenon is translated into force measurements via a carefully designed and instrumented mechanical embodiment (MIT Leak Detector). We then introduce a detection and estimation scheme. The latter one allows not only for the reliable detection, but also for the estimation of the incidence angle and the magnitude of the forces that are associated with the leak. Finally, a prototype is built and experiments in pipes are conducted to demonstrate the efficacy of the proposed methodology.},
keywords = {Algorithms, Control Theory, Experimentation, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics and Automation, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
Soltani I Bozchalooi; Kamal Youcef-Toumi
Control design for division and compensation with application to high-speed/large-range nano-positioning Proceedings Article
In: 2014 American Control Conference, pp. 1643-1648, IEEE IEEE, 2014, ISBN: 978-1-4799-3274-0.
Abstract | Links | BibTeX | Tags: Control Theory, Experimentation, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation, Visualization
@inproceedings{MRL_AFM_Nano_Positioning_Control,
title = {Control design for division and compensation with application to high-speed/large-range nano-positioning},
author = {Soltani I Bozchalooi and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/6859262},
doi = {10.1109/ACC.2014.6859262},
isbn = {978-1-4799-3274-0},
year = {2014},
date = {2014-07-21},
booktitle = {2014 American Control Conference},
pages = {1643-1648},
publisher = {IEEE},
organization = {IEEE},
abstract = {In this paper an easy to implement control design strategy is proposed to achieve large range and high speed nano-positioning. The designed controllers aim to divide the positioning task between multiple large range/low speed and small range/high speed nano-positioners. Each controller assigns the proper frequency range to individual nano-positioners, and simultaneously compensates for the corresponding excited dynamics at high positioning speeds. Control design is formulated in the form of several single input-single output (SISO) system identification problems. The proposed approach removes the need for fundamental changes in the design of the conventional scanners such as piezo tubes for applications necessitating high speed and large range nano-positioning.},
keywords = {Control Theory, Experimentation, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
Ethan B Heller; Kamal Youcef-Toumi
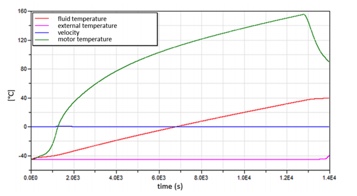
Analysis and control of a thermal management system for robots in temperature-restricted environments Proceedings Article
In: 2014 American Control Conference, 2014, ISBN: 978-1-4799-3274-0.
Abstract | Links | BibTeX | Tags: Control Theory, Data-driven learning for intelligent machine maintenance, intelligent systems, Physical System Modeling, Simulation
@inproceedings{MRL_DDL_Thermal_Robot_Management,
title = {Analysis and control of a thermal management system for robots in temperature-restricted environments},
author = {Ethan B Heller and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=6858774&isnumber=6858556},
doi = {10.1109/ACC.2014.6858774},
isbn = {978-1-4799-3274-0},
year = {2014},
date = {2014-06-01},
booktitle = {2014 American Control Conference},
abstract = {Detailed simulations were performed with a model of a proposed thermal management system (TMS) that allows robots to operate within environments that are hostile to the free expulsion of waste heat. Previous simulations have shown that a closed-loop control method is necessary for the proposed TMS to maintain proper robot operation for long missions. A closed-loop control based on model-predictive methods was constructed in MATLAB around the model of the TMS so long missions are possible without violating any of the operating constraints of the robot or the environment. The closed-loop simulations results show that the control successfully maintains robot operation within the environment for a long mission.},
keywords = {Control Theory, Data-driven learning for intelligent machine maintenance, intelligent systems, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
Apoorva Santhosh; Amro Farid; Kamal Youcef-Toumi
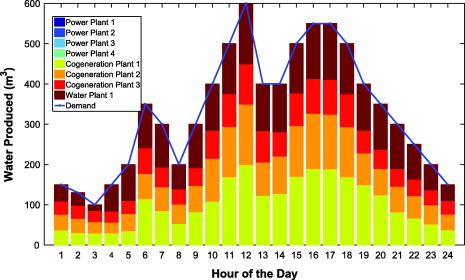
Real-time economic dispatch for the supply side of the energy-water nexus Journal Article
In: Applied Energy, vol. 122, pp. 42–52, 2014.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Control Theory, Data-driven learning for intelligent machine maintenance, intelligent systems, Simulation
@article{MRL_AFM_Economic_Energy_Water_Nexus,
title = {Real-time economic dispatch for the supply side of the energy-water nexus},
author = {Apoorva Santhosh and Amro Farid and Kamal Youcef-Toumi},
doi = {10.1016/j.apenergy.2014.01.062},
year = {2014},
date = {2014-06-01},
journal = {Applied Energy},
volume = {122},
pages = {42–52},
publisher = {researchgate},
abstract = {Clean energy and water are two essential resources that any society must securely deliver. Their usage raises sustainability issues and questions of nations’ resilience in face of global changes and mega-trends such as population growth, global climate change, and economic growth. Traditionally, the infrastructure systems that deliver these precious commodities, the water distribution and power transmission networks are thought of as separate, uncoupled systems. However, in reality, they are very much coupled in what is commonly known as the energy-water nexus. Although this subject has recently caught the attention of numerous policy and regulatory agencies, rarely is it holistically addressed in terms of an integrated engineering system for its management, planning, and regulation as an interdisciplinary concern. This work specifically fills this gap by addressing the supply side of this integrated engineering system. Specifically, it develops the multi-plant real-time simultaneous economic dispatch of power and water. While significant background literature has addressed traditional power dispatch, and the emerging co-dispatch of power and heat, as of now there does not exist a parameterized model for the optimized dispatch of power and water for multiple power, water, and coproduction facilities. The work presents such a model where production costs are minimized subject to capacity, demand and process constraints. It is demonstrated on an illustrative example of modest size. Interesting results were observed suggesting that the coproduction minimum capacity limits and process constraints can lead to scenarios where cheaper single product plants can be crowded out of the dispatch. The program provides a systematic method of achieving optimal results and can serve as a basis for set-points upon which individual plants can implement their optimal control. In so doing, it makes a supply-side contribution to the ongoing grand-challenge of improving the sustainability of the energy-water nexus.},
keywords = {Algorithms, Computational Intelligence, Control Theory, Data-driven learning for intelligent machine maintenance, intelligent systems, Simulation},
pubstate = {published},
tppubtype = {article}
}
D Chatzigeorgiou; K Youcef-Toumi; R Ben-Mansour
Design of a Novel In-Pipe Reliable Leak Detector Journal Article
In: IEEE/ASME Transactions on Mechatronics, vol. 20, no. 2, pp. 824-833, 2014, ISSN: 1941-014X.
Abstract | Links | BibTeX | Tags: Control Theory, Experimentation, Inspection, Physical System Modeling, repair & intelligence for water distribution pipes, Robotics & Automation
@article{MRL_AFM_Leak_Detector,
title = {Design of a Novel In-Pipe Reliable Leak Detector},
author = {D Chatzigeorgiou and K Youcef-Toumi and R Ben-Mansour},
url = {https://ieeexplore.ieee.org/document/6778062?arnumber=6778062},
doi = {10.1109/TMECH.2014.2308145},
issn = {1941-014X},
year = {2014},
date = {2014-03-25},
journal = {IEEE/ASME Transactions on Mechatronics},
volume = {20},
number = {2},
pages = {824-833},
publisher = {IEEE},
abstract = {Leakage is the major factor for unaccounted losses in every pipe network around the world (oil, gas, or water). In most cases, the deleterious effects associated with the occurrence of leaks may present serious economical and health problems. Therefore, leaks must be quickly detected, located, and repaired. Unfortunately, most state-of-the-art leak detection systems have limited applicability, are neither reliable nor robust, while others depend on the user experience. In this paper, we present a new in-pipe leak detection system. It performs autonomous leak detection in pipes and, thus, eliminates the need for the user experience. This paper focuses on the detection module and its main characteristics. Detection in based on the presence of a pressure gradient in the neighborhood of the leak. Moreover, the proposed detector can sense leaks at any angle around the circumference of the pipe with only two sensors. We validate the concepts by building a prototype and evaluate the system's performance under real conditions in an experimental laboratory setup.},
keywords = {Control Theory, Experimentation, Inspection, Physical System Modeling, repair & intelligence for water distribution pipes, Robotics & Automation},
pubstate = {published},
tppubtype = {article}
}
Iman Soltani Bozchalooi; Kamal Youcef-Toumi
Multi-actuation and PI control: A simple recipe for high-speed and large-range atomic force microscopy Journal Article
In: Ültramicroscopy, vol. 146, pp. 117 - 124, 2014, ISSN: 0304-3991.
Abstract | Links | BibTeX | Tags: Control Theory, Experimentation, Instrumentation, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation
@article{MRL_AFM_Multi_PI_control,
title = {Multi-actuation and PI control: A simple recipe for high-speed and large-range atomic force microscopy},
author = {Iman Soltani Bozchalooi and Kamal Youcef-Toumi},
url = {http://www.sciencedirect.com/science/article/pii/S0304399114001491},
doi = {https://doi.org/10.1016/j.ultramic.2014.07.010},
issn = {0304-3991},
year = {2014},
date = {2014-01-01},
journal = {Ültramicroscopy},
volume = {146},
pages = {117 - 124},
abstract = {High speed atomic force microscopy enables observation of dynamic nano-scale processes. However, maintaining a minimal interaction force between the sample and the probe is challenging at high speed specially when using conventional piezo-tubes. While rigid AFM scanners are operational at high speeds with the drawback of reduced tracking range, multi-actuation schemes have shown potential for high-speed and large-range imaging. Here we present a method to seamlessly incorporate additional actuators into conventional AFMs. The equivalent behavior of the resulting multi-actuated setup resembles that of a single high-speed and large-range actuator with maximally flat frequency response. To achieve this, the dynamics of the individual actuators and their couplings are treated through a simple control scheme. Upon the implementation of the proposed technique, commonly used PI controllers are able to meet the requirements of high-speed imaging. This forms an ideal platform for retroactive enhancement of existing AFMs with minimal cost and without compromise on the tracking range. A conventional AFM with tube scanner is retroactively enhanced through the proposed method and shows an order of magnitude improvement in closed loop bandwidth performance while maintaining large range. The effectiveness of the method is demonstrated on various types of samples imaged in contact and tapping modes, in air and in liquid.},
keywords = {Control Theory, Experimentation, Instrumentation, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {article}
}
2012
Brett Shapiro; Nergis Mavalvala; Kamal Youcef-Toumi
Modal damping of a quadruple pendulum for advanced gravitational wave detectors Proceedings Article
In: 2012 American Control Conference (ACC), pp. 1017-1022, ACC ACC, 2012, ISBN: 978-1-4577-1096-4.
Abstract | Links | BibTeX | Tags: Control Theory, Data-driven learning for intelligent machine maintanence, Experimentation, Fabrication, intelligent systems, Physical System Modeling, Simulation
@inproceedings{MRL_DDL_Gravity_Wave_Detectors,
title = {Modal damping of a quadruple pendulum for advanced gravitational wave detectors},
author = {Brett Shapiro and Nergis Mavalvala and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/6315185},
doi = {10.1109/ACC.2012.6315185},
isbn = {978-1-4577-1096-4},
year = {2012},
date = {2012-10-02},
booktitle = {2012 American Control Conference (ACC)},
pages = {1017-1022},
publisher = {ACC},
organization = {ACC},
abstract = {The Laser Interferometer Gravitational-Wave Observatory (LIGO) has begun a major set of upgrades to reach a sensitivity better than 10-19 m/√(Hz) in the 10Hz to 10 kHz frequency band. This advance is expected to bring gravitational wave observations of relativistic astrophysical events such as black hole mergers and supernovae into the realm of regular astronomy. These upgrades require complex vibration isolation systems to better decouple the test masses from ground disturbances. These high performance systems require correspondingly more complex and aggressive active control loops to meet the increased demand in instrument sensitivity. This paper applies a modal damping technique with state estimation to optimize the trade-off between disturbance rejection and sensor noise amplification. The state estimator design applies a customized cost function around the Linear Quadratic Regulator (LQR) algorithm.},
keywords = {Control Theory, Data-driven learning for intelligent machine maintanence, Experimentation, Fabrication, intelligent systems, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
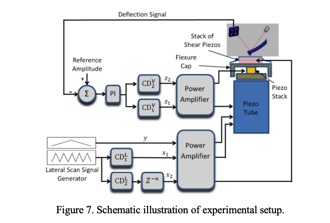
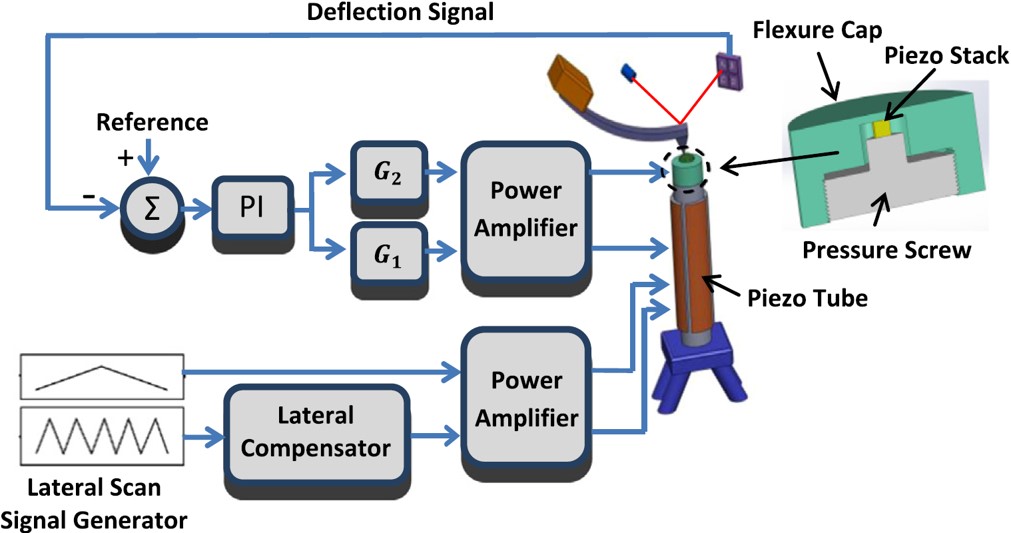
Soltani I Bozchalooi; Kamal Youcef-Toumi; D J Burns; Georg E Fantner
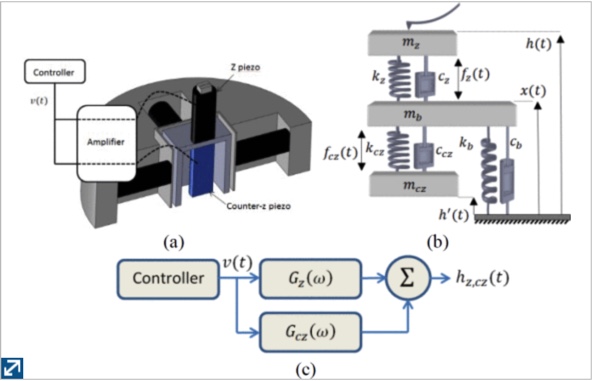
A vibration suppression approach to high-speed atomic force microscopy Proceedings Article
In: 2012 American Control Conference (ACC), pp. 3797-3802, ACC ACC, 2012, ISBN: 978-1-4577-1096-4.
Abstract | Links | BibTeX | Tags: Control Theory, Experimentation, Instrumentation, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation, Visualization
@inproceedings{MRL_AFM_Vibration_Suppression,
title = {A vibration suppression approach to high-speed atomic force microscopy},
author = {Soltani I Bozchalooi and Kamal Youcef-Toumi and D J Burns and Georg E Fantner},
url = {https://ieeexplore.ieee.org/document/6315281},
doi = {10.1109/ACC.2012.6315281},
isbn = {978-1-4577-1096-4},
year = {2012},
date = {2012-10-02},
booktitle = {2012 American Control Conference (ACC)},
pages = {3797-3802},
publisher = {ACC},
organization = {ACC},
abstract = {The possibility of many new applications and novel scientific observations can be provided by efficient and reliable high-speed atomic force microscopy techniques. However, the reliability of the AFM images decreases significantly as the imaging speed is increased to levels required for the targeted real-time observation of nano-scale phenomenon. One of the main reasons behind this limitation is the excitation of the AFM dynamics at high scan speeds. In this research we propose a piezo based, feedforward controlled, counter actuation mechanism to compensate for the excited out-of-plane scanner dynamics. For this purpose the AFM controller output is properly filtered via a linear compensator and then applied to a counter actuating piezo. The information required for compensator design is extracted from the cantilever deflection signal hence, eliminating the need for any additional sensors. The proposed approach is implemented and experimentally evaluated on the dynamic response of a custom made AFM. It is further assessed by comparing the imaging performance of the AFM with and without the application of the proposed technique and in comparison with the conventional counterbalancing methodology. The experimental results substantiate the effectiveness of the method in significantly improving the imaging performance of AFM at high scan speeds.},
keywords = {Control Theory, Experimentation, Instrumentation, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
Rached Ben-Mansour; Kabir Suara; Kamal Youcef-Toumi
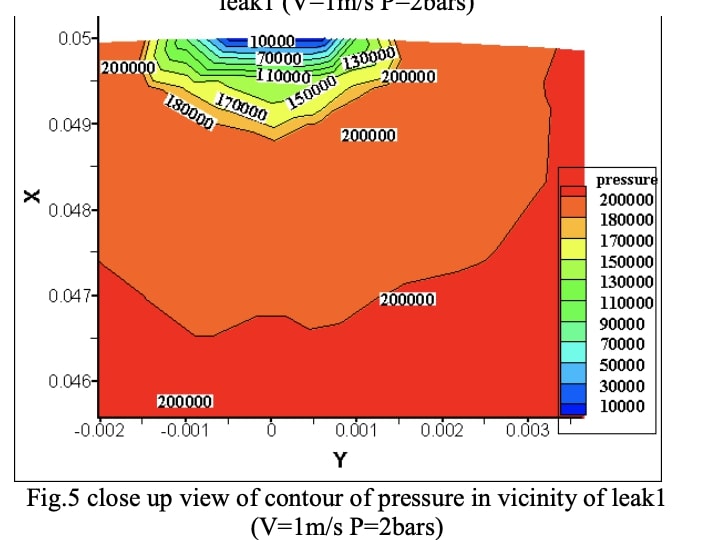
Determination of important flow characteristics for leak detection in water pipelines-networks Journal Article
In: Computational Thermal Sciences, vol. 5, pp. 143-151, 2012, ISSN: 143-151.
Abstract | Links | BibTeX | Tags: Control Theory, Inspection, Physical System Modeling, repair & intelligence for water distribution pipes, Robotics & Automation, Simulation
@article{MRL_AFM_Flow_Leak_Detection,
title = {Determination of important flow characteristics for leak detection in water pipelines-networks},
author = {Rached Ben-Mansour and Kabir Suara and Kamal Youcef-Toumi},
url = {http://www.dl.begellhouse.com/journals/648192910890cd0e,1c6ade0932d1248e,18dcce9156c09e65.html},
doi = {10.1615/ComputThermalScien.2013006301},
issn = {143-151},
year = {2012},
date = {2012-07-16},
journal = {Computational Thermal Sciences},
volume = {5},
pages = {143-151},
publisher = {begellhouse},
abstract = {The accuracy of a leak detection method depends greatly on the flow and leak parameters in a given pipeline. This paper gives some insight into the flow characteristics around simulated small leaks. The present computational fluid dynamics (CFD) studies have indicated clear distinctive features in fluid pressure and fluid acceleration that can be used for the early detection of small leaks (<1 of the total flow) in water distribution pipelines. The present CFD simulations based on a steady state standard к − ε turbulent flow model are carried out for different pressure lines in 4 in. (100 m) ID pipe. Based on these simulations, it has been found out that the pressure gradients in the vicinity of the leaks are quite large, hence a leak detection method based on pressure gradient measurement is proposed. In addition, these simulations have shown remarkable gradients in the axial flow acceleration along the centerline of the pipe. These discovered flow features can offer another leak detection method based on the use of accelerometers.},
keywords = {Control Theory, Inspection, Physical System Modeling, repair & intelligence for water distribution pipes, Robotics & Automation, Simulation},
pubstate = {published},
tppubtype = {article}
}
R Ben-Mansour; M A Habib; A Khalifa; K Youcef-Toumi; D Chatzigeorgiou
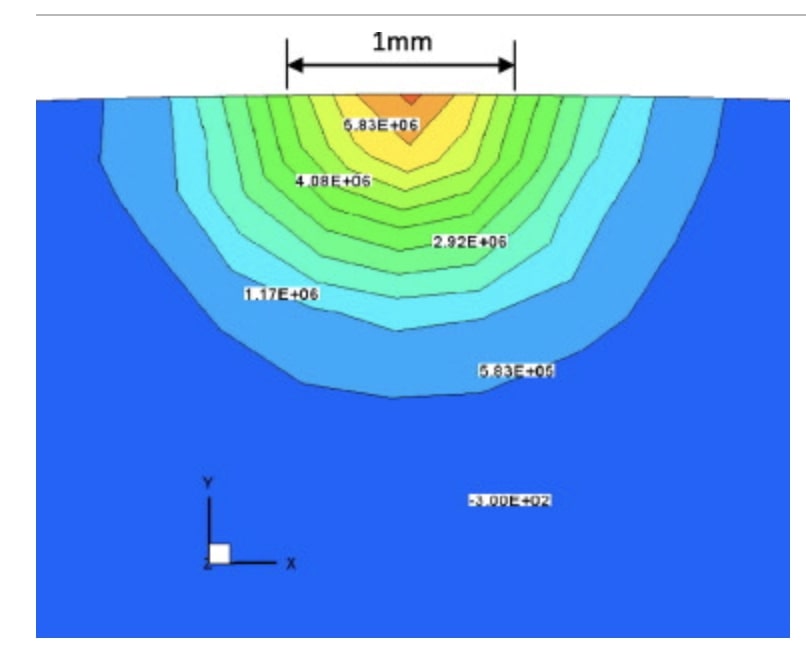
Computational fluid dynamic simulation of small leaks in water pipelines for direct leak pressure transduction Journal Article
In: Computers & Fluids, vol. 57, pp. 110-123, 2012, ISSN: 0045-7930.
Abstract | Links | BibTeX | Tags: Control Theory, Inspection, Physical System Modeling, repair & intelligence for water distribution pipes, Robotics & Automation, Simulation
@article{MRL_AFM_Dynamic_Simulation_Leak_Pipe,
title = {Computational fluid dynamic simulation of small leaks in water pipelines for direct leak pressure transduction},
author = {R Ben-Mansour and M A Habib and A Khalifa and K Youcef-Toumi and D Chatzigeorgiou},
url = {https://www.sciencedirect.com/science/article/pii/S0045793011003884},
doi = {https://doi.org/10.1016/j.compfluid.2011.12.016},
issn = {0045-7930},
year = {2012},
date = {2012-03-30},
journal = {Computers & Fluids},
volume = {57},
pages = {110-123},
publisher = {Science Direct},
abstract = {Computational fluid dynamic simulation of small leaks in a pipe having 0.1m diameter has been performed under realistic velocities and pressures using a 3D turbulent flow model of well tested CFD code. The steady state simulations have shown clear signature in the pressure and pressure gradient variations along the pipe. For very small leaks (below 1l/min), this signature in not very strong in the pressure variation, but very clear in the pressure gradient. The averaged power spectral density (PSD) as well as FFT of the pressure fluctuations based on transient Detached Eddy Simulations (DESs) are presented for different locations around the leak position. These results show that the presence of a leak causes measurable differences in the magnitude and frequency of the pressure signal spectrum and also in the averaged PSD for the range of 220–500Hz frequency.},
keywords = {Control Theory, Inspection, Physical System Modeling, repair & intelligence for water distribution pipes, Robotics & Automation, Simulation},
pubstate = {published},
tppubtype = {article}
}
2011
Vijay Shilpiekandula; Kamal Youcef-Toumi
Integrated Design and Control of Flexure-Based Nanopositioning Systems — Part I: Methodology Proceedings Article
In: pp. 9406-9412, IFAC, 2011, ISSN: 1474-6670, (18th IFAC World Congress).
Abstract | Links | BibTeX | Tags: Control Theory, Mechatronic Design, Nanotechnology, Physical System Modeling, Robot operated modular fixtures, Simulation
@inproceedings{MRL_AFM_Flexure_Nanopositioning_Methodology,
title = {Integrated Design and Control of Flexure-Based Nanopositioning Systems — Part I: Methodology},
author = {Vijay Shilpiekandula and Kamal Youcef-Toumi},
url = {https://www.sciencedirect.com/science/article/pii/S1474667016451232},
doi = {https://doi.org/10.3182/20110828-6-IT-1002.03796},
issn = {1474-6670},
year = {2011},
date = {2011-09-01},
journal = {IFAC Proceedings Volumes},
volume = {44},
number = {1},
pages = {9406-9412},
publisher = {IFAC},
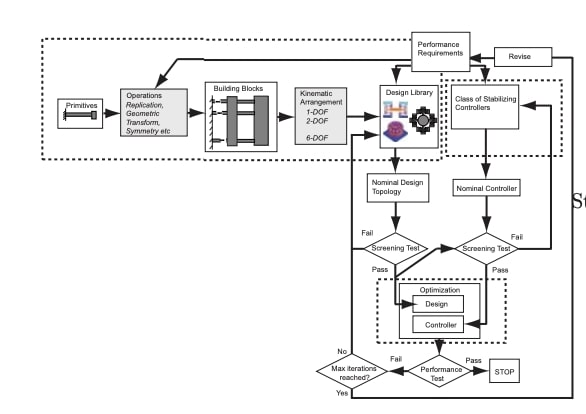
abstract = {Abstract
Flexure-based mechanisms, also referred to as flexures, are widely being used as motion-guidance, or bearing, elements in applications requiring multi-degree-of-freedom positioning and alignment. Unlike friction-bearings (such as sliding or rolling contact bearings), flexures can be designed to offer, to a large extent, reliable linear elastic motion with a high resolution (on the order of nanometers) over small ranges of motion (on order of micrometers). Example applications include positioning a probe or sample in atomic force microscopy, alignment of tool and sample in stamping processes, and fine-positioning of wafers and masks in semiconductor manufacturing. These applications are often required satisfy critical functional requirements, such as load-capacity, bandwidth, resolution, and range. A systematic approach is needed to simultaneously address the design and control challenges involved, starting from the initial design concept generation stage to the final control implementation and testing. In this paper, we present an integrated design and control method for implementing flexure-based nanopositioning systems. We discuss the need for varying design topology and order of a controller in design and control optimization. An automation engine generates a set of flexure-based design topologies and also controllers of varying order in the optimization. A simple 1-DOF example is worked out to illustrate the steps involved in using this methodology. The outcome of the exercise is a novel design topology, with it shape and size optimized, and a controller synthesized such that a desired control bandwidth and design requirements of strength and modal separation are met.},
note = {18th IFAC World Congress},
keywords = {Control Theory, Mechatronic Design, Nanotechnology, Physical System Modeling, Robot operated modular fixtures, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
Flexure-based mechanisms, also referred to as flexures, are widely being used as motion-guidance, or bearing, elements in applications requiring multi-degree-of-freedom positioning and alignment. Unlike friction-bearings (such as sliding or rolling contact bearings), flexures can be designed to offer, to a large extent, reliable linear elastic motion with a high resolution (on the order of nanometers) over small ranges of motion (on order of micrometers). Example applications include positioning a probe or sample in atomic force microscopy, alignment of tool and sample in stamping processes, and fine-positioning of wafers and masks in semiconductor manufacturing. These applications are often required satisfy critical functional requirements, such as load-capacity, bandwidth, resolution, and range. A systematic approach is needed to simultaneously address the design and control challenges involved, starting from the initial design concept generation stage to the final control implementation and testing. In this paper, we present an integrated design and control method for implementing flexure-based nanopositioning systems. We discuss the need for varying design topology and order of a controller in design and control optimization. An automation engine generates a set of flexure-based design topologies and also controllers of varying order in the optimization. A simple 1-DOF example is worked out to illustrate the steps involved in using this methodology. The outcome of the exercise is a novel design topology, with it shape and size optimized, and a controller synthesized such that a desired control bandwidth and design requirements of strength and modal separation are met.
Brett Shapiro; Nergis Mavalvala; Kamal Youcef-Toumi
Actuator sizing of a quadruple pendulum for advanced gravitational wave detectors Proceedings Article
In: Proceedings of the 2011 American Control Conference, pp. 1358-1363, ACC ACC, 2011, ISBN: 978-1-4577-0081-1.
Abstract | Links | BibTeX | Tags: Control Theory, Data-driven learning for intelligent machine maintanence, Experimentation, Fabrication, intelligent systems, Physical System Modeling, Simulation
@inproceedings{MRL_DDL_Actuator_Sizing_Pendulum,
title = {Actuator sizing of a quadruple pendulum for advanced gravitational wave detectors},
author = {Brett Shapiro and Nergis Mavalvala and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/5991170},
doi = {10.1109/ACC.2011.5991170},
isbn = {978-1-4577-0081-1},
year = {2011},
date = {2011-08-18},
booktitle = {Proceedings of the 2011 American Control Conference},
pages = {1358-1363},
publisher = {ACC},
organization = {ACC},
abstract = {The Laser Interferometer Gravitational-Wave Observatory (LIGO) has begun a major set of upgrades to reach a sensitivity better than 10-19 m/√(Hz) in the 10 Hz to 10 kHz frequency band. This advance is expected to bring gravitational wave observations of relativistic astrophysical events such as black hole mergers and supernovae into the realm of regular astronomy. These upgrades require complex vibration isolation systems to better decouple the test masses from ground disturbances. These high performance systems require correspondingly more complex and aggressive active control loops to meet the increased demand in instrument sensitivity. Appropriately sized actuators are essential to achieving the necessary control performance while limiting the cost, noise, and complexity associated with larger actuators. This paper applies the plant's pseudoinverse transfer function to analyze the least squares dynamic range required by the actuators to reject the stochastic disturbances exciting the Advanced LIGO quadruple pendulum isolation systems.},
keywords = {Control Theory, Data-driven learning for intelligent machine maintanence, Experimentation, Fabrication, intelligent systems, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
Tavakoli H Nia; L Han; Y Li; Soltani I Bozchalooi; H Hung; E Frank; K Youcef-Toumi; A Grodzinsky; C Orti
The effect of GAG depletion on cartilage nanoscale hydraulic permeability Proceedings Article
In: ORS 2012 Annual Meeting, pp. 0282, ORS ORS, 2011, ISBN: 978-1-4577-1096-4.
Abstract | Links | BibTeX | Tags: Control Theory, Instrumentation, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation
@inproceedings{MRL_AFM_GAG_Depletion,
title = {The effect of GAG depletion on cartilage nanoscale hydraulic permeability},
author = {Tavakoli H Nia and L Han and Y Li and Soltani I Bozchalooi and H Hung and E Frank and K Youcef-Toumi and A Grodzinsky and C Orti},
url = {http://www.ors.org/Transactions/58/0282.pdf},
doi = {10.1109/ACC.2012.6315281},
isbn = {978-1-4577-1096-4},
year = {2011},
date = {2011-01-01},
booktitle = {ORS 2012 Annual Meeting},
pages = {0282},
publisher = {ORS},
organization = {ORS},
abstract = {The advent of new time-dependent nanomechanical methods has recently enabled the quantification of cartilage tissue poroelasticity and hydraulic permeability, k, at the nanoscale [1-3] and holds great potential for early detection of pathological changes and diagnosis of osteoarthritis (OA). It is known that at the macroscale, tissue hydraulic permeability can undergo several order-of-magnitude changes due to OA [4] while the equilibrium stiffness may vary by only a factor of 2 [5]. This is because GAG chains are the main determinant of the pore size (consequently, hydraulic permeability) of cartilage while they contribute only partially to the compression stiffness of the tissue. Here, we extend the technique of atomic force microscope-based dynamic oscillatory nanoindentation to a larger frequency range (1-10,000 Hz) and compare these data to finite element analysis simulations to study the effect of GAG content, relevant to early stage OA.},
keywords = {Control Theory, Instrumentation, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
0000
C Yang; C Li; F Xia; Y Zhu; J Zhao; K Youcef-Toumi
Charge Controller With Decoupled and Self-Compensating Configurations for Linear Operation of Piezoelectric Actuators in a Wide Bandwidth Journal Article
In: IEEE Transactions on Industrial Electronics, vol. 66, no. 7, pp. 5392-5402, 0000, ISSN: 1557-9948.
Abstract | Links | BibTeX | Tags: Control Theory, Instrumentation, Nanotechnology, Physical System Modeling, Robot operated modular fixtures, Visualization
@article{MRL_AFM_Charge_Controller_Compensating_Configs,
title = {Charge Controller With Decoupled and Self-Compensating Configurations for Linear Operation of Piezoelectric Actuators in a Wide Bandwidth},
author = {C Yang and C Li and F Xia and Y Zhu and J Zhao and K Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/8466119},
doi = {10.1109/TIE.2018.2868321},
issn = {1557-9948},
journal = {IEEE Transactions on Industrial Electronics},
volume = {66},
number = {7},
pages = {5392-5402},
abstract = {Charge control is a well-known sensorless approach to operate piezoelectric actuators, which has been proposed for more than 30 years. However, it is rarely used in industry because the implemented controllers suffer from the issues of limited low-frequency performance, long settling time, floating-load, and loss of stroke, etc. In this paper, a novel controller circuit dedicated to overcome these issues is presented. In the proposed scheme, a grounded-load charge controller with decoupled configuration is developed, which separates high-frequency and low-frequency paths, thus achieving arbitrarily low transition frequency without increasing the settling time. Based on this, a self-compensating configuration is further proposed and integrated into the controller circuit, which makes full use of controller output to improve its own control performance at low frequencies. Experimental results show that the presented charge controller can effectively reduce more than 88% of the hysteretic nonlinearity even when operating close to the transition frequency. To demonstrate its practical value, we then integrate it into a custom-designed high-speed atomic force microscope system. By comparing images obtained from using voltage drive and charge controller, it is clear that the piezoelectric hysteresis has been significantly reduced in a wide bandwidth.},
keywords = {Control Theory, Instrumentation, Nanotechnology, Physical System Modeling, Robot operated modular fixtures, Visualization},
pubstate = {published},
tppubtype = {article}
}