
Mechatronics Research Lab Publications
List still being populated due to webpage maintenance
2014
Dimitris Chatzigeorgiou; Kamal Youcef-Toumi; Rached Ben-Mansour
Detection estimation algorithms for in-pipe leak detection Proceedings Article
In: 2014 American Control Conference, pp. 5508-5514, 2014, ISBN: 978-1-4799-3274-0.
Abstract | Links | BibTeX | Tags: Algorithms, Control Theory, Experimentation, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics and Automation, Simulation
@inproceedings{MRL_WDP_Estimation_Algorithms,
title = {Detection estimation algorithms for in-pipe leak detection},
author = {Dimitris Chatzigeorgiou and Kamal Youcef-Toumi and Rached Ben-Mansour},
url = {https://ieeexplore.ieee.org/document/6859203},
doi = {10.1109/ACC.2014.6859203},
isbn = {978-1-4799-3274-0},
year = {2014},
date = {2014-07-21},
booktitle = {2014 American Control Conference},
pages = {5508-5514},
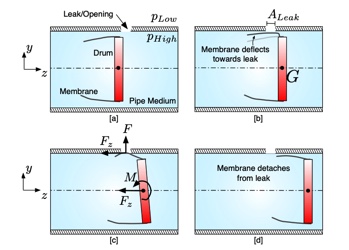
abstract = {Leakage is the most important factor for unaccounted losses in any pipe network around the world. However, most state of the art leak detection systems have limited applicability, lack in reliability and/or depend on user experience for data interpretation. In this paper we present a new, autonomous, in-pipe, leak detection system. The detection principle is based on the presence of a pressure gradient in the neighborhood of a leak in a pressurized pipe. This phenomenon is translated into force measurements via a carefully designed and instrumented mechanical embodiment (MIT Leak Detector). We then introduce a detection and estimation scheme. The latter one allows not only for the reliable detection, but also for the estimation of the incidence angle and the magnitude of the forces that are associated with the leak. Finally, a prototype is built and experiments in pipes are conducted to demonstrate the efficacy of the proposed methodology.},
keywords = {Algorithms, Control Theory, Experimentation, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics and Automation, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
2012
C Choi; D Chatzigeorgiou; R Ben-Mansour; K Youcef-Toumi
Design and analysis of novel friction controlling mechanism with minimal energy for in-pipe robot applications Proceedings Article
In: 2012 IEEE International Conference on Robotics and Automation, pp. 4118-4123, IEEE IEEE, 2012, ISBN: 978-1-4673-1405-3.
Abstract | Links | BibTeX | Tags: Experimentation, Fabrication, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics and Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Friction_Minimization,
title = {Design and analysis of novel friction controlling mechanism with minimal energy for in-pipe robot applications},
author = {C Choi and D Chatzigeorgiou and R Ben-Mansour and K Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/6225380},
doi = {10.1109/ICRA.2012.6225380},
isbn = {978-1-4673-1405-3},
year = {2012},
date = {2012-06-28},
booktitle = {2012 IEEE International Conference on Robotics and Automation},
pages = {4118-4123},
publisher = {IEEE},
organization = {IEEE},
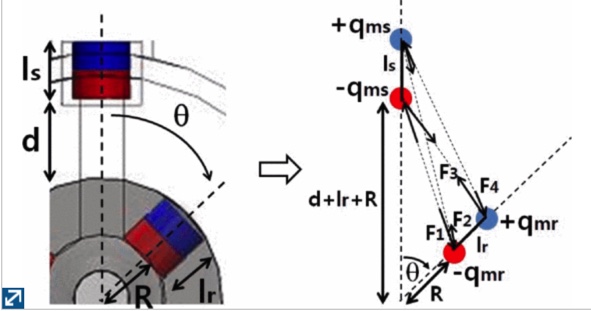
abstract = {In-pipe wheeled robots require friction on the wheels to maintain traction. Ability to vary this friction is highly desirable but conventionally used linkage mechanism is not suitable for it. This paper presents a novel mechanism generating adjustable friction with minimal energy consumption for in-pipe robots. The mechanism uses permanent magnets to achieve the objective. An appropriate model for the system is also presented and discussed. The paper identifies the important design parameters, and more importantly establishes the relation between the design parameters and the system's performance. In addition, a prototype of the mechanism was designed, fabricated and tested for validation.},
keywords = {Experimentation, Fabrication, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics and Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
2010
Pablo Valdivia y Alvarado; Stephanie Chin; Winston Larson; Anirban Mazumdar; Kamal Youcef-Toumi
A soft body under-actuated approach to multi degree of freedom biomimetic robots: A stingray example Proceedings Article
In: 2010 3rd IEEE RAS EMBS International Conference on Biomedical Robotics and Biomechatronics, pp. 473-478, IEEE IEEE, 2010, ISBN: 978-1-4244-7709-8.
Abstract | Links | BibTeX | Tags: Biomimetic robotic fish for underwater monitoring, Experimentation, Mechatronic Design, Physical System Modeling, Robotics and Automation, Simulation, Visualization
@inproceedings{MRL_BRF_Multi_DOF_Stingray,
title = {A soft body under-actuated approach to multi degree of freedom biomimetic robots: A stingray example},
author = {Pablo Valdivia y Alvarado and Stephanie Chin and Winston Larson and Anirban Mazumdar and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/5627803},
doi = {10.1109/BIOROB.2010.5627803},
isbn = {978-1-4244-7709-8},
year = {2010},
date = {2010-11-11},
booktitle = {2010 3rd IEEE RAS EMBS International Conference on Biomedical Robotics and Biomechatronics},
pages = {473-478},
publisher = {IEEE},
organization = {IEEE},
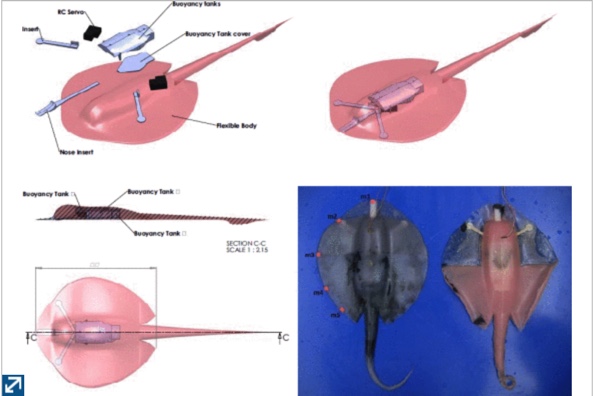
abstract = {In this paper we present a new application of the methodology our group is developing to design and prototype under-actuated biomimetic robots by determining appropriate body material property distributions. When excited, flexible bodies with proper anisotropic material distributions display modes of vibration that mimic required locomotion kinematics and require minimal actuation. Our previous prototypes explored simple two dimensional applications for fish-like swimming. In this paper, the three dimensional vibrational kinematics of a stingray are explored. A simple design is explained, and corresponding prototypes are presented along with preliminary performance data. Our methodology shows great promise to develop simple, robust, and inexpensive mobile robots that can efficiently accomplish locomotion.},
keywords = {Biomimetic robotic fish for underwater monitoring, Experimentation, Mechatronic Design, Physical System Modeling, Robotics and Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}