
Mechatronics Research Lab Publications
List still being populated due to webpage maintenance
2021
Fangzhou Xia; James Quigley; Xiaotong Zhang; Chen Yang; Yi Wang; Kamal Youcef-Toumi
A modular low-cost atomic force microscope for precision mechatronics education Journal Article
In: Mechatronics, vol. 76, pp. 102550, 2021, ISSN: 0957-4158.
Abstract | Links | BibTeX | Tags: Experimentation, Fabrication, Instrumentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling
@article{MRL_AFM_Low_cost_AFM,
title = {A modular low-cost atomic force microscope for precision mechatronics education},
author = {Fangzhou Xia and James Quigley and Xiaotong Zhang and Chen Yang and Yi Wang and Kamal Youcef-Toumi},
url = {https://www.sciencedirect.com/science/article/pii/S0957415821000441},
doi = {https://doi.org/10.1016/j.mechatronics.2021.102550},
issn = {0957-4158},
year = {2021},
date = {2021-04-15},
journal = {Mechatronics},
volume = {76},
pages = {102550},
publisher = {ScienceDirect},
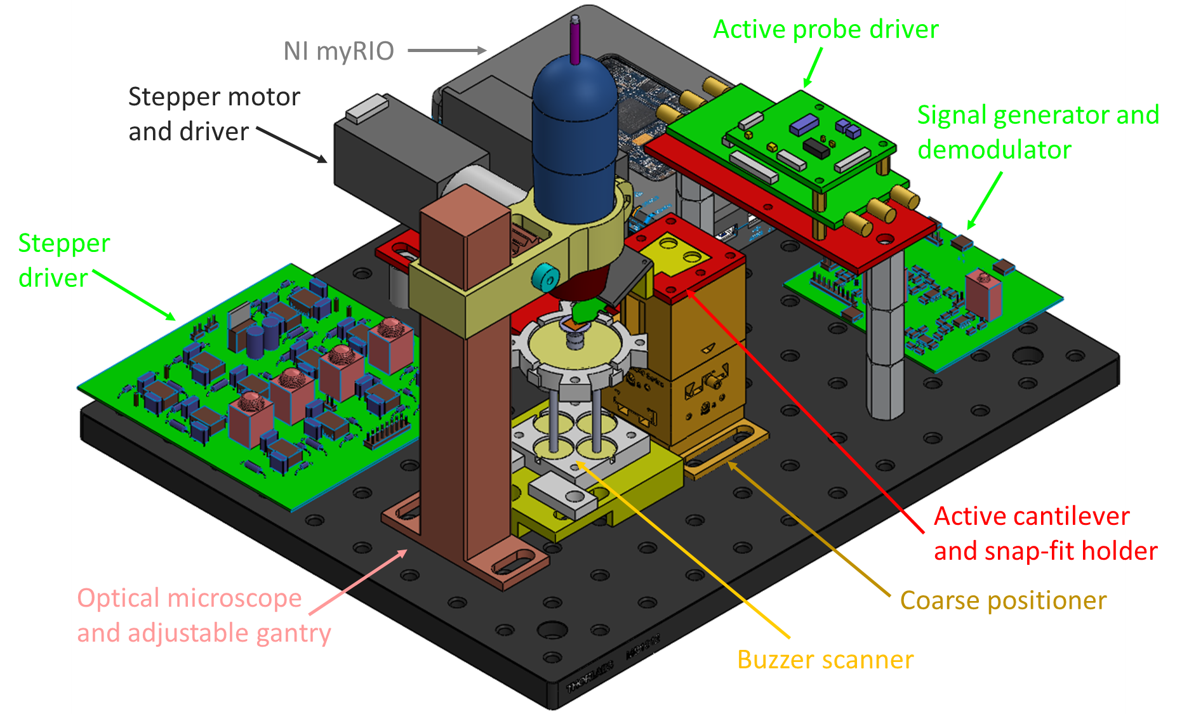
abstract = {Precision mechatronics and nanotechnology communities can both benefit from a course centered around an Atomic Force Microscope (AFM). Developing an AFM can provide precision mechatronics engineers with a valuable multidisciplinary hands-on training experience. In return, such expertise can be applied to the design and implementation of new precision instruments, which helps nanotechnology researchers make new scientific discoveries. However, existing AFMs are not suitable for mechatronics education due to their different original design intentions. Therefore, we address this challenge by developing an AFM intended for precision mechatronics education. This paper presents the design and implementation of an educational AFM and its corresponding precision mechatronics class. The modular educational AFM is low-cost (≤$4,000) and easy to operate. The cost reduction is enabled by new subsystem development of a buzzer-actuated scanner and demodulation electronics designed to interface with a myRIO data acquisition system. Moreover, the use of an active cantilever probe with piezoresistive sensing and thermomechanical actuation significantly reduced experiment setup overhead with improved operational safety. In the end, the developed AFM capabilities are demonstrated with imaging results. The paper also showcases the course design centered around selected subsystems. The new AFM design allows scientific-method-based learning, maximizes utilization of existing resources, and offers potential subsystem upgrades for high-end research applications. The presented instrument and course can help connect members of both the AFM and the mechatronics communities to further develop advanced techniques for new applications.},
keywords = {Experimentation, Fabrication, Instrumentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling},
pubstate = {published},
tppubtype = {article}
}
2020
L Yang; I Paranawithana; K Youcef-Toumi; U Tan
Confidence-Based Hybrid Tracking to Overcome Visual Tracking Failures in Calibration-Less Vision-Guided Micromanipulation Journal Article
In: IEEE Transactions on Automation Science and Engineering, vol. 17, no. 1, pp. 524-536, 2020, ISSN: 1558-3783.
Abstract | Links | BibTeX | Tags: Algorithms, Mechatronic Design, Nanotechnology, Physical System Modeling, Robotics & Automation
@article{MRL_AFM_Confidence_Based_Hybrid_Tracking,
title = {Confidence-Based Hybrid Tracking to Overcome Visual Tracking Failures in Calibration-Less Vision-Guided Micromanipulation},
author = {L Yang and I Paranawithana and K Youcef-Toumi and U Tan},
doi = {10.1109/TASE.2019.2932724},
issn = {1558-3783},
year = {2020},
date = {2020-01-01},
journal = {IEEE Transactions on Automation Science and Engineering},
volume = {17},
number = {1},
pages = {524-536},
publisher = {IEEE},
abstract = {This article proposes a confidence-based approach for combining two visual tracking techniques to minimize the influence of unforeseen visual tracking failures to achieve uninterrupted vision-based control. Despite research efforts in vision-guided micromanipulation, existing systems are not designed to overcome visual tracking failures, such as inconsistent illumination condition, regional occlusion, unknown structures, and nonhomogenous background scene. There remains a gap in expanding current procedures beyond the laboratory environment for practical deployment of vision-guided micromanipulation system. A hybrid tracking method, which combines motion-cue feature detection and score-based template matching, is incorporated in an uncalibrated vision-guided workflow capable of self-initializing and recovery during the micromanipulation. Weighted average, based on the respective confidence indices of the motion-cue feature localization and template-based trackers, is inferred from the statistical accuracy of feature locations and the similarity score-based template matches. Results suggest improvement of the tracking performance using hybrid tracking under the conditions. The mean errors of hybrid tracking are maintained at subpixel level under adverse experimental conditions while the original template matching approach has mean errors of 1.53, 1.73, and 2.08 pixels. The method is also demonstrated to be robust in the nonhomogeneous scene with an array of plant cells. By proposing a self-contained fusion method that overcomes unforeseen visual tracking failures using pure vision approach, we demonstrated the robustness in our developed low-cost micromanipulation platform.},
keywords = {Algorithms, Mechatronic Design, Nanotechnology, Physical System Modeling, Robotics & Automation},
pubstate = {published},
tppubtype = {article}
}
2019

Juan Heredia; Jonathan Tirado; Vladislav Panov; Miguel Altamirano Cabrera; Kamal Youcef-Toumi; Dzmitry Tsetserukou
RecyGlide: A Forearm-Worn Multi-Modal Haptic Display Aimed to Improve User VR Immersion Submission Proceedings Article
In: 25th ACM Symposium on Virtual Reality Software and Technology, pp. 1-2, Association for Computing Machinery, 2019, ISBN: 9781450370011.
Abstract | Links | BibTeX | Tags: Computational Intelligence, Control Theory, Data-driven learning for intelligent machine maintenance, Experimentation, intelligent systems, Mechatronic Design, Simulation, Visualization
@inproceedings{MRL_AFM_VR_Multi_Modal_Display,
title = {RecyGlide: A Forearm-Worn Multi-Modal Haptic Display Aimed to Improve User VR Immersion Submission},
author = {Juan Heredia and Jonathan Tirado and Vladislav Panov and Miguel Altamirano Cabrera and Kamal Youcef-Toumi and Dzmitry Tsetserukou},
url = {https://doi.org/10.1145/3359996.3364759},
doi = {10.1145/3359996.3364759},
isbn = {9781450370011},
year = {2019},
date = {2019-11-01},
booktitle = {25th ACM Symposium on Virtual Reality Software and Technology},
pages = {1-2},
publisher = {Association for Computing Machinery},
abstract = {Haptic devices have been employed to immerse users in VR environments. In particular, hand and finger haptic devices have been deeply developed. However, this type of devices occludes hand detection for some tracking systems, or, for some other tracking systems, it is uncomfortable for the users to wear two different devices (haptic and tracking device) on both hands. We introduce RecyGlide, a novel wearable multimodal display located at the forearm. The RecyGlide is composed of inverted five-bar linkages with 2 degrees of freedom (DoF) and vibration motors (see Fig. 1.(a). The device provides multimodal tactile feedback such as slippage, force vector, pressure, and vibration. We tested the discrimination ability of monomodal and multimodal stimuli patterns on the forearm and confirmed that the multimodal patterns have higher recognition rate. This haptic device was used in VR applications, and we proved that it enhances VR experience and makes it more interactive.},
keywords = {Computational Intelligence, Control Theory, Data-driven learning for intelligent machine maintenance, Experimentation, intelligent systems, Mechatronic Design, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
Chen Yang; Fangzhou Xia; Yi Wang; Stephen Truncale; Kamal Youcef-Toumi
Design and Control of a Multi-Actuated Nanopositioning Stage with Stacked Structure Proceedings Article
In: 2019 American Control Conference (ACC), pp. 3782–3788, IEEE IEEE, 2019, ISBN: 978-1-5386-7926-5.
Abstract | Links | BibTeX | Tags: Experimentation, Fabrication, Instrumentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Simulation
@inproceedings{MRL_AFM_Stacked_Nanopositioner,
title = {Design and Control of a Multi-Actuated Nanopositioning Stage with Stacked Structure},
author = {Chen Yang and Fangzhou Xia and Yi Wang and Stephen Truncale and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/8815299},
doi = {10.23919/ACC.2019.8815299},
isbn = {978-1-5386-7926-5},
year = {2019},
date = {2019-08-29},
booktitle = {2019 American Control Conference (ACC)},
pages = {3782--3788},
publisher = {IEEE},
organization = {IEEE},
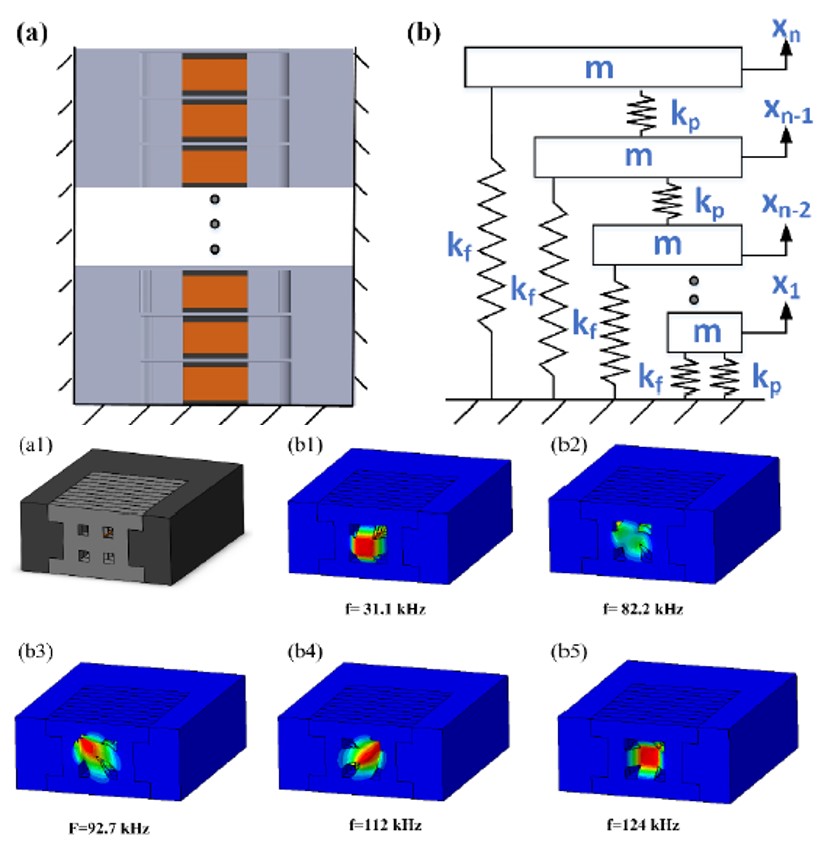
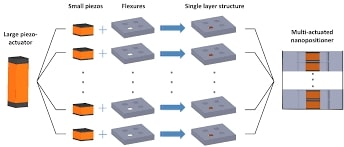
abstract = {A novel multi-actuated nanopositioning stage with stacked structure has been developed. The aim is to achieve both high bandwidth and large motion range. Symmetric flexures are designed to obtain equal stiffness along any direction in the lateral plane. With this design, the lateral stiffness and corresponding bending mode resonance frequency can be optimized. Both analytical model and finite element analysis are employed to predict the dominant resonance frequency. Experimental results indicate that the dominant resonance of nanopositioner is at 28.2 kHz, with a motion range of 16.5J.1m. A disturbance-observer-based controller is implemented to suppress the hysteretic nonlinearity. The new design and control system enable high-bandwidth and high-precision nanopositioning up to 2 kHz.},
keywords = {Experimentation, Fabrication, Instrumentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
Ishara Paranawithana; Zhong Hoo Chau; Liangjing Yang; Zhong Chen; Kamal Youcef-Toumi; U-Xuan Tan
Automatic Targeting of Plant Cells via Cell Segmentation and Robust Scene-Adaptive Tracking Proceedings Article
In: 2019 International Conference on Robotics and Automation (ICRA), pp. 7116-7122, IEEE IEEE, 2019, ISBN: 978-1-5386-6027-0.
Abstract | Links | BibTeX | Tags: Algorithms, Biological device for cancer cell characterization, Computational Intelligence, Experimentation, Mechatronic Design, Nanotechnology, Visualization
@inproceedings{MRL_AFM_Cell_Segment_Targeting,
title = {Automatic Targeting of Plant Cells via Cell Segmentation and Robust Scene-Adaptive Tracking},
author = {Ishara Paranawithana and Zhong Hoo Chau and Liangjing Yang and Zhong Chen and Kamal Youcef-Toumi and U-Xuan Tan},
url = {https://ieeexplore.ieee.org/document/8793944},
doi = {10.1109/ICRA.2019.8793944},
isbn = {978-1-5386-6027-0},
year = {2019},
date = {2019-08-12},
booktitle = {2019 International Conference on Robotics and Automation (ICRA)},
pages = {7116-7122},
publisher = {IEEE},
organization = {IEEE},
abstract = {Automatic targeting of plant cells to perform tasks like extraction of chloroplast is often desired in the study of plant biology. Hence, this paper proposes an improved cell segmentation method combined with a robust tracking algorithm for vision-guided micromanipulation in plant cells. The objective of this work is to develop an automatic plant cell detection and localization technique to complete the automated workflow for plant cell manipulation. The complex structural properties of plant cells make both segmentation of cells and visual tracking of the microneedle immensely challenging, unlike single animal cell applications. Thus, an improved version of watershed segmentation with adaptive thresholding is proposed to detect the plant cells without the need for staining of the cells or additional tedious preparations. To manipulate the needle to reach the identified centroid of the cells, tracking of the needle tip is required. Visual and motion information from two data sources namely, template tracking and projected manipulator trajectory are combined using score-based normalized weighted averaging to continuously track the microneedle. The selection of trackers is influenced by their complementary nature as the former and latter are individually robust against physical and visual uncertainties, respectively. Experimental results validate the effectiveness of the proposed method by detecting plant cell centroids accurately, tracking the microneedle constantly and reaching the plant cell of interest despite the presence of visual disturbances.},
keywords = {Algorithms, Biological device for cancer cell characterization, Computational Intelligence, Experimentation, Mechatronic Design, Nanotechnology, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
C Yang; F Xia; Y Wang; S Truncale; K Youcef-Toumi
Design and Control of a Multi-Actuated Nanopositioning Stage with Stacked Structure Proceedings Article
In: 2019 American Control Conference (ACC), pp. 3782-3788, IEEE, 2019, ISSN: 2378-5861.
Abstract | Links | BibTeX | Tags: Control Theory, Direct-drive robots for laser cutting manufacturing, Fabrication, Instrumentation, Mechatronic Design, Robotics & Automation
@inproceedings{MRL_AFM_Nanopositioning_Stage_Stacked,
title = {Design and Control of a Multi-Actuated Nanopositioning Stage with Stacked Structure},
author = {C Yang and F Xia and Y Wang and S Truncale and K Youcef-Toumi},
doi = {10.23919/ACC.2019.8815299},
issn = {2378-5861},
year = {2019},
date = {2019-07-12},
booktitle = {2019 American Control Conference (ACC)},
journal = {xplore},
pages = {3782-3788},
publisher = {IEEE},
abstract = {A novel multi-actuated nanopositioning stage with stacked structure has been developed. The aim is to achieve both high bandwidth and large motion range. Symmetric flexures are designed to obtain equal stiffness along any direction in the lateral plane. With this design, the lateral stiffness and corresponding bending mode resonance frequency can be optimized. Both analytical model and finite element analysis are employed to predict the dominant resonance frequency. Experimental results indicate that the dominant resonance of nanopositioner is at 28.2 kHz, with a motion range of 16.5J.1m. A disturbance-observer-based controller is implemented to suppress the hysteretic nonlinearity. The new design and control system enable high-bandwidth and high-precision nanopositioning up to 2 kHz.},
keywords = {Control Theory, Direct-drive robots for laser cutting manufacturing, Fabrication, Instrumentation, Mechatronic Design, Robotics & Automation},
pubstate = {published},
tppubtype = {inproceedings}
}
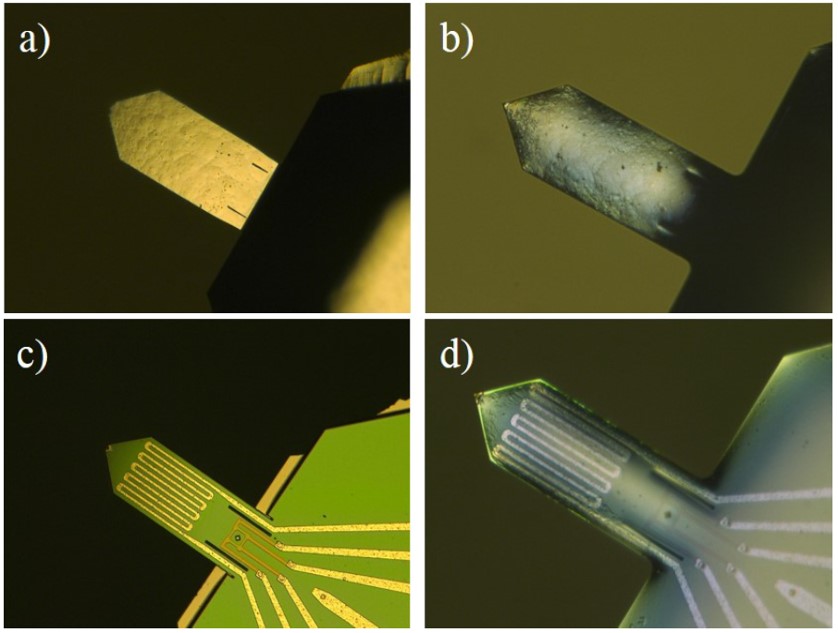
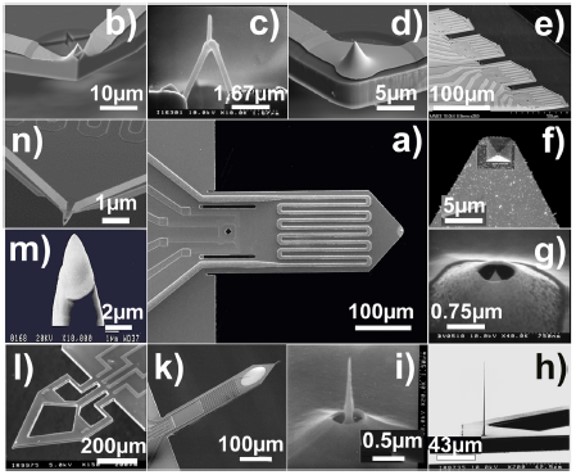
Fangzhou Xia; Chen Yang; Yi Wang; Kamal Youcef-Toumi; Christoph Reuter; Tzvetan Ivanov; Mathias Holz; Ivo W Rangelow
Lights Out! Nano-Scale Topography Imaging of Sample Surface in Opaque Liquid Environments with Coated Active Cantilever Probes Journal Article
In: Nanomaterials, vol. 9, no. 7, pp. 1013, 2019.
Abstract | Links | BibTeX | Tags: Experimentation, Fabrication, Full text available online, Instrumentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Visualization
@article{MRL_AFM_coated_probe,
title = {Lights Out! Nano-Scale Topography Imaging of Sample Surface in Opaque Liquid Environments with Coated Active Cantilever Probes},
author = {Fangzhou Xia and Chen Yang and Yi Wang and Kamal Youcef-Toumi and Christoph Reuter and Tzvetan Ivanov and Mathias Holz and Ivo W Rangelow},
url = {https://www.ncbi.nlm.nih.gov/pmc/articles/PMC6669515/},
doi = {10.3390/nano9071013},
year = {2019},
date = {2019-07-09},
journal = {Nanomaterials},
volume = {9},
number = {7},
pages = {1013},
publisher = {Multidisciplinary Digital Publishing Institute},
abstract = {Atomic force microscopy is a powerful topography imaging method used widely in nanoscale metrology and manipulation. A conventional Atomic Force Microscope (AFM) utilizes an optical lever system typically composed of a laser source, lenses and a four quadrant photodetector to amplify and measure the deflection of the cantilever probe. This optical method for deflection sensing limits the capability of AFM to obtaining images in transparent environments only. In addition, tapping mode imaging in liquid environments with transparent sample chamber can be difficult for laser-probe alignment due to multiple different refraction indices of materials. Spurious structure resonance can be excited from piezo actuator excitation. Photothermal actuation resolves the resonance confusion but makes optical setup more complicated. In this paper, we present the design and fabrication method of coated active scanning probes with piezoresistive deflection sensing, thermomechanical actuation and thin photoresist polymer surface coating. The newly developed probes are capable of conducting topography imaging in opaque liquids without the need of an optical system. The selected coating can withstand harsh chemical environments with high acidity (e.g., 35% sulfuric acid). The probes are operated in various opaque liquid environments with a custom designed AFM system to demonstrate the imaging performance. The development of coated active probes opens up possibilities for observing samples in their native environments.},
keywords = {Experimentation, Fabrication, Full text available online, Instrumentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Visualization},
pubstate = {published},
tppubtype = {article}
}
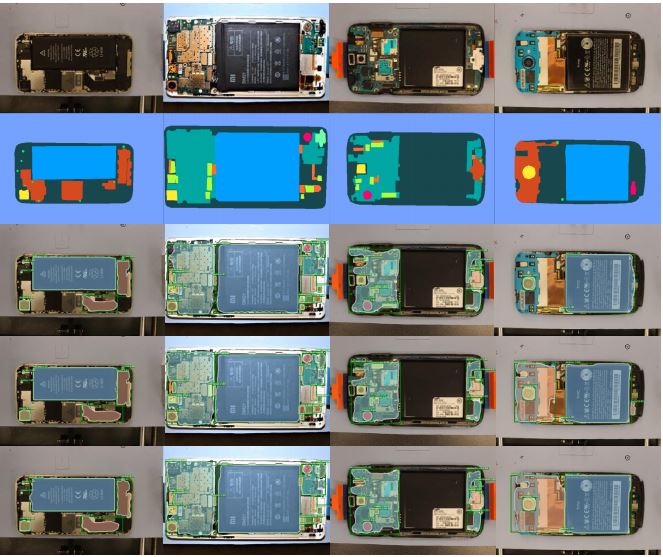
Ali Jahanian; Quang H Le; Kamal Youcef-Toumi; Dzmitry Tsetserukou
See the E-Waste! Training Visual Intelligence to See Dense Circuit Boards for Recycling Proceedings Article
In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, 2019.
Abstract | Links | BibTeX | Tags: Algorithms, Automated cellphone recycling, Computational Intelligence, Experimentation, Mechatronic Design, Robotics & Automation, Visualization
@inproceedings{MRL_AFM_Training_CB_Recycling,
title = {See the E-Waste! Training Visual Intelligence to See Dense Circuit Boards for Recycling},
author = {Ali Jahanian and Quang H Le and Kamal Youcef-Toumi and Dzmitry Tsetserukou},
url = {https://openaccess.thecvf.com/content_CVPRW_2019/html/cv4gc/Jahanian_See_the_E-Waste_Training_Visual_Intelligence_to_See_Dense_Circuit_CVPRW_2019_paper.html},
year = {2019},
date = {2019-06-01},
booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops},
abstract = {The state-of-the-art semantic segmentation and object detection deep learning models are taking the leap to generalize and leverage automation, but have yet to be useful in real-world tasks such as those in dense circuit board robotic manipulation. Consider a cellphone circuit board that because of small components and a couple of hundred microns gaps between them challenges any manipulation task. For effective automation and robotics usage in manufacturing, we tackle this problem by building a convolutional neural networks optimized for multi-task learning of instance semantic segmentation and detection while accounting for crisp boundaries of small components inside dense boards. We explore the feature learning mechanism, and add the auxiliary task of boundary detection to encourage the network to learn the objects' geometric properties along with the other objectives. We examine the performance of the networks in the visual tasks (separately and all together), and the extent of generalization on the recycling phone dataset. Our network outperformed the state-of-the-art in the visual tasks while maintaining the high speed of computation. To facilitate this globally concerning topic, we provide a benchmark for Ewaste visual tasks research, and publicize our collected dataset and code, as well as demos on our in-lab robot at https://github.com/MIT-MRL/recybot. pubstate = published},
keywords = {Algorithms, Automated cellphone recycling, Computational Intelligence, Experimentation, Mechatronic Design, Robotics & Automation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
2018
Fangzhou Xia; Stephen Truncale; Yi Wang; Kamal Youcef-Toumi
Design and Control of a Multi-actuated High-bandwidth and Large-range Scanner for Atomic Force Microscopy Proceedings Article
In: 2018 Annual American Control Conference (ACC), pp. 4330–4335, IEEE IEEE, 2018.
Abstract | Links | BibTeX | Tags: Control Theory, Experimentation, Fabrication, Instrumentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation
@inproceedings{MRL_AFM_Dual_Actuated_Scanner,
title = {Design and Control of a Multi-actuated High-bandwidth and Large-range Scanner for Atomic Force Microscopy},
author = {Fangzhou Xia and Stephen Truncale and Yi Wang and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/8431801},
doi = {10.23919/ACC.2018.8431801},
year = {2018},
date = {2018-08-16},
booktitle = {2018 Annual American Control Conference (ACC)},
pages = {4330--4335},
publisher = {IEEE},
organization = {IEEE},
abstract = {Atomic force microscopes (AFMs) with high-speed and large-range capabilities open up possibilities for many new applications. It is desirable to have a large scanning range along with zooming ability to obtain high resolution and high frame-rate imaging. Such capabilities will increase the imaging throughput and allow more sophisticated observations at the nanoscale. Unfortunately, in-plane scanning of conventional piezo tube scanners typically covers a large range of hundreds of microns but has limited bandwidth up to several hundred Hertz. The main focus of this paper is the multi-actuated piezo scanner design and control algorithm to achieve high-speed tracking. Three design strategies for structure bandwidth and operational range consideration are presented and evaluated. The non-linear hysteresis effect of the piezo actuators is modeled using the Preisach hysteresis model. PID control, iterative learning control and repetitive control strategies were investigated in simulation. Based on the controllers performance, the repetitive controller is implemented on a high-speed FPGA device and experimentally verified. The new AFM scanner design is capable of 10 kHz tracking at 3 μm range and 200 Hz tracking at 100 μm range.},
keywords = {Control Theory, Experimentation, Fabrication, Instrumentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
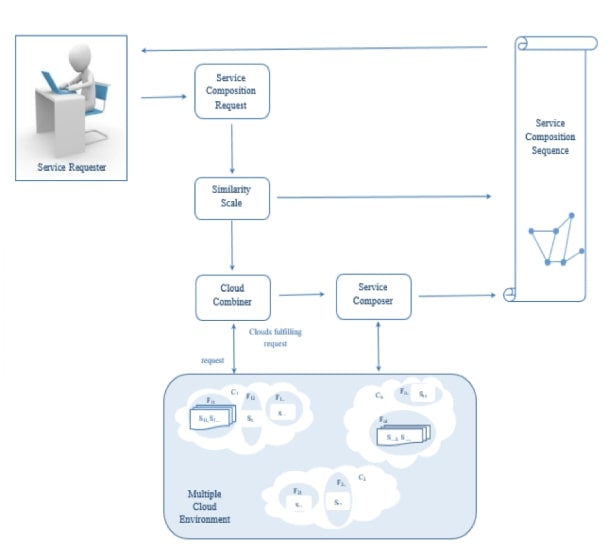
H Kurdi; F Ezzat; L Altoaimy; S H Ahmed; K Youcef-Toumi
MultiCuckoo: Multi-Cloud Service Composition Using a Cuckoo-Inspired Algorithm for the Internet of Things Applications Journal Article
In: IEEE Access, vol. 6, pp. 56737-56749, 2018, ISSN: 2169-3536.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Data-driven learning for intelligent machine maintenance, intelligent systems, Mechatronic Design, Simulation
@article{MRL_AFM_MultiCuckoo,
title = {MultiCuckoo: Multi-Cloud Service Composition Using a Cuckoo-Inspired Algorithm for the Internet of Things Applications},
author = {H Kurdi and F Ezzat and L Altoaimy and S H Ahmed and K Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/8476294?denied=},
doi = {10.1109/ACCESS.2018.2872744},
issn = {2169-3536},
year = {2018},
date = {2018-01-01},
journal = {IEEE Access},
volume = {6},
pages = {56737-56749},
publisher = {IEEE},
abstract = {Internet of things (IoT) applications aim to provide access to widespread interconnected networks of smart devices, services, and information. This can be achieved by integrating IoT and cloud computing (CC). By using cloud computing service composition (SC), multiple services from various providers can be combined to meet users' requirements. However, SC is known for its complexity and is classified as an NP-hard problem; such problems are usually approached using heuristics, such as bioinspired algorithms. This paper aims at developing a bio-inspired algorithm that mimics the behavior of cuckoo birds (which examine the nests of other birds to find eggs similar to their own) to find a composite service that fulfills a user's request in a multi-cloud environment (MCE). Previous work on cuckoo-inspired algorithms has generally utilized metaheuristics, which try to fit a “good”solution to a general optimization problem. In contrast, we propose a problem-dependent heuristic that considers the SC problem and its particularities in MCE. The proposed algorithm, MultiCuckoo, was thoroughly evaluated based on a well-controlled experimental framework that benchmarks the performance of the new algorithm to other outstanding SC algorithms, including the all clouds combination algorithm, base cloud combination algorithm, and combinatorial optimization algorithm for multiple cloud service Composition. The results show that our algorithm is more efficient in terms of decreasing the number of examined services, the composed clouds, and the running time in comparison to the benchmark algorithms.},
keywords = {Algorithms, Computational Intelligence, Data-driven learning for intelligent machine maintenance, intelligent systems, Mechatronic Design, Simulation},
pubstate = {published},
tppubtype = {article}
}
2017
Ivo W Rangelow; Tzvetan Ivanov; Ahmad Ahmad; Marcus Kaestner; Claudia Lenk; Iman Soltani Bozchalooi; Fangzhou Xia; Kamal Youcef-Toumi; Mathias Holz; Alexander Reum
Review Article: Active scanning probes: A versatile toolkit for fast imaging and emerging nanofabrication Journal Article
In: Journal of Vacuum Science & Technology B, Nanotechnology and Microelectronics: Materials, Processing, Measurement, and Phenomena, vol. 35, no. 6, pp. 06G101, 2017.
Abstract | Links | BibTeX | Tags: Instrumentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Visualization
@article{MRL_AFM_active_probe_review,
title = {Review Article: Active scanning probes: A versatile toolkit for fast imaging and emerging nanofabrication},
author = {Ivo W Rangelow and Tzvetan Ivanov and Ahmad Ahmad and Marcus Kaestner and Claudia Lenk and Iman Soltani Bozchalooi and Fangzhou Xia and Kamal Youcef-Toumi and Mathias Holz and Alexander Reum},
url = {https://avs.scitation.org/doi/full/10.1116/1.4992073},
doi = {10.1116/1.4992073},
year = {2017},
date = {2017-11-03},
journal = {Journal of Vacuum Science & Technology B, Nanotechnology and Microelectronics: Materials, Processing, Measurement, and Phenomena},
volume = {35},
number = {6},
pages = {06G101},
publisher = {American Vacuum Society},
abstract = {With the recent advances in the field of nanotechnology, measurement and manipulation requirements at the nanoscale have become more stringent than ever before. In atomic force microscopy, high-speed performance alone is not sufficient without considerations of other aspects of the measurement task, such as the feature aspect ratio, required range, or acceptable probe-sample interaction forces. In this paper, the authors discuss these requirements and the research directions that provide the highest potential in meeting them. The authors elaborate on the efforts toward the downsizing of self-sensed and self-actuated probes as well as on upscaling by active cantilever arrays. The authors present the fabrication process of active probes along with the tip customizations carriedout targeting specific application fields. As promising application in scope of nanofabrication, field emission scanning probe lithography is introduced. The authors further discuss their control and design approach. Here, microactuators, e.g., multilayer microcantilevers, and macroactuators, e.g., flexure scanners, are combined in order to simultaneously meet both the range and speed requirements of a new generation of scanning probe microscopes.},
keywords = {Instrumentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Visualization},
pubstate = {published},
tppubtype = {article}
}
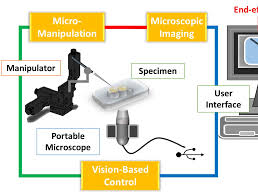
L Yang; I Paranawithana; K Youcef-Toumi; U Tan
Automatic Vision-Guided Micromanipulation for Versatile Deployment and Portable Setup Journal Article
In: IEEE Transactions on Automation Science and Engineering, vol. 15, no. 4, pp. 1609-1620, 2017, ISSN: 1558-3783.
Abstract | Links | BibTeX | Tags: Control Theory, Mechatronic Design, Physical System Modeling, Robot operated modular fixtures, Robotics & Automation
@article{MRL_AFM_Automatic_Micromanipulation,
title = {Automatic Vision-Guided Micromanipulation for Versatile Deployment and Portable Setup},
author = {L Yang and I Paranawithana and K Youcef-Toumi and U Tan},
doi = {10.1109/TASE.2017.2754517},
issn = {1558-3783},
year = {2017},
date = {2017-10-23},
journal = {IEEE Transactions on Automation Science and Engineering},
volume = {15},
number = {4},
pages = {1609-1620},
publisher = {IEEE},
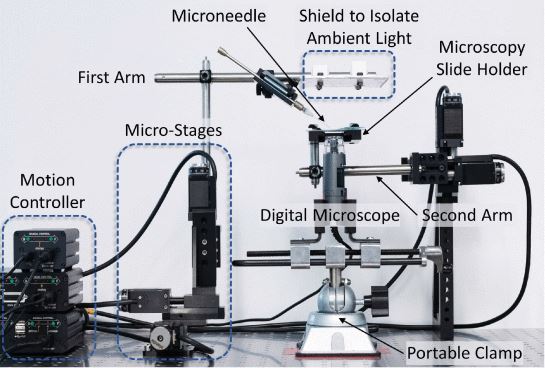
abstract = {In this paper, an automatic vision-guided micromanipulation approach to facilitate versatile deployment and portable setup is proposed. This paper is motivated by the importance of micromanipulation and the limitations in existing automation technology in micromanipulation. Despite significant advancements in micromanipulation techniques, there remain bottlenecks in integrating and adopting automation for this application. An underlying reason for the gaps is the difficulty in deploying and setting up such systems. To address this, we identified two important design requirements, namely, portability and versatility of the micromanipulation platform. A self-contained vision-guided approach requiring no complicated preparation or setup is proposed. This is achieved through an uncalibrated self-initializing workflow algorithm also capable of assisted targeting. The feasibility of the solution is demonstrated on a low-cost portable microscope camera and compact actuated microstages. Results suggest subpixel accuracy in localizing the tool tip during initialization steps. The self-focus mechanism could recover intentional blurring of the tip by autonomously manipulating it 95.3% closer to the focal plane. The average error in visual servo is less than a pixel with our depth compensation mechanism showing better maintaining of similarity score in tracking. Cell detection rate in a 1637-frame video stream is 97.7% with subpixels localization uncertainty. Our work addresses the gaps in existing automation technology in the application of robotic vision-guided micromanipulation and potentially contributes to the way cell manipulation is performed.},
keywords = {Control Theory, Mechatronic Design, Physical System Modeling, Robot operated modular fixtures, Robotics & Automation},
pubstate = {published},
tppubtype = {article}
}
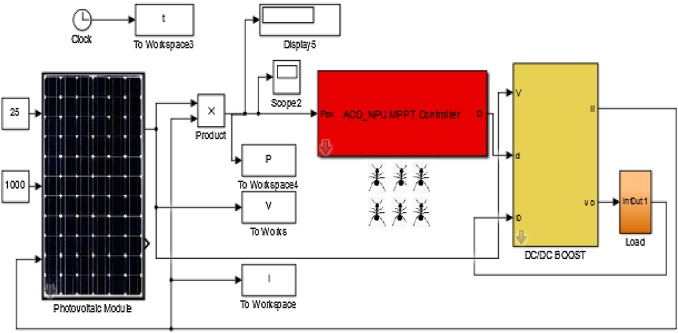
Sabrina Titri; Cherif Larbes; Kamal Youcef Toumi; Karima Benatchba
A new MPPT controller based on the Ant colony optimization algorithm for Photovoltaic systems under partial shading conditions Journal Article
In: Applied Soft Computing, vol. 58, pp. 465-479, 2017, ISSN: 1568-4946.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, intelligent systems, Mechatronic Design, Probabilistic neural networks for robust machine learning, Simulation
@article{MRL_AFM_MPPT_Controller_Ants,
title = {A new MPPT controller based on the Ant colony optimization algorithm for Photovoltaic systems under partial shading conditions},
author = {Sabrina Titri and Cherif Larbes and Kamal Youcef Toumi and Karima Benatchba},
url = {https://www.sciencedirect.com/science/article/pii/S1568494617302703},
doi = {https://doi.org/10.1016/j.asoc.2017.05.017},
issn = {1568-4946},
year = {2017},
date = {2017-09-01},
journal = {Applied Soft Computing},
volume = {58},
pages = {465-479},
abstract = {The Maximum Power Point Tracking controller (MPPT) is a key element in Photovoltaic systems (PV). It is used to maintain the PV operating point at its maximum under different temperatures and sunlight irradiations. The goal of a MPPT controller is to satisfy the following performances criteria: accuracy, precision, speed, robustness and handling the partial shading problem when climatic changes variations occur. To achieve this goal, several techniques have been proposed ranging from conventional methods to artificial intelligence and bio-inspired methods. Each technique has its own advantage and disadvantage. In this context, we propose in this paper, a new Bio- inspired MPPT controller based on the Ant colony Optimization algorithm with a New Pheromone Updating strategy (ACO_NPU MPPT) that saves the computation time and performs an excellent tracking capability with high accuracy, zero oscillations and high robustness. First, the different steps of the design of the proposed ACO_NPU MPPT controller are developed. Then, several tests are performed under standard conditions for the selection of the appropriate ACO_NPU parameters (number of ants, coefficients of evaporation, archive size, etc.). To evaluate the performances of the obtained ACO_NPU MPPT, in terms of its tracking speed, accuracy, stability and robustness, tests are carried out under slow and rapid variations of weather conditions (Irradiance and Temperature) and under different partial shading patterns. Moreover, to demonstrate the superiority and robustness of the proposed ACO_NPU_MPPT controller, the obtained results are analyzed and compared with others obtained from the Conventional Methods (P&O_MPPT) and the Soft Computing Methods with Artificial intelligence (ANN_MPPT, FLC_MPPT, ANFIS_MPPT, FL_GA_MPPT) and with the Bio Inspired methods (PSO) and (ACO) from the literature. The obtained results show that the proposed ACO_NPU MPPT controller gives the best performances under variables atmospheric conditions. In addition, it can easily track the global maximum power point (GMPP) under partial shading conditions.},
keywords = {Algorithms, Computational Intelligence, intelligent systems, Mechatronic Design, Probabilistic neural networks for robust machine learning, Simulation},
pubstate = {published},
tppubtype = {article}
}
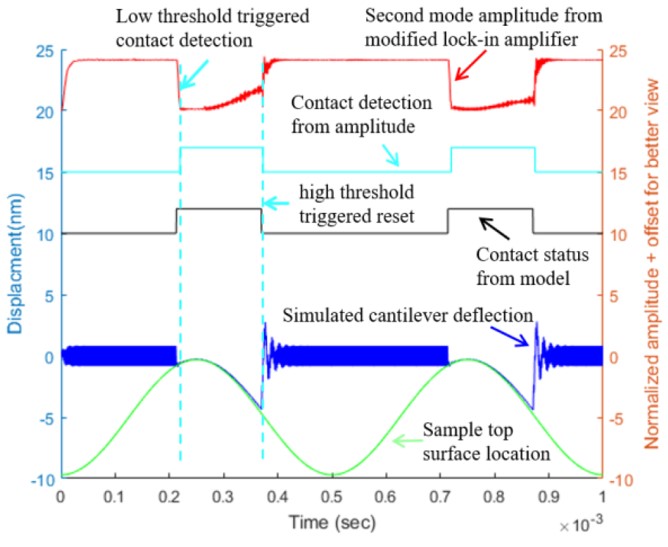
Fangzhou Xia; Iman Soltani Bozchalooi; Kamal Youcef-Toumi
Induced Vibration Contact Detection for Minimizing Cantilever Tip-Sample Interaction Forces in Jumping Mode Atomic Force Microscopy Proceedings Article
In: 2017 American Control Conference (ACC), pp. 4141–4146, IEEE IEEE, 2017, ISBN: 978-1-5090-5992-8.
Abstract | Links | BibTeX | Tags: Algorithms, Control Theory, Experimentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation
@inproceedings{MRL_AFM_IVCD,
title = {Induced Vibration Contact Detection for Minimizing Cantilever Tip-Sample Interaction Forces in Jumping Mode Atomic Force Microscopy},
author = {Fangzhou Xia and Iman Soltani Bozchalooi and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/7963591},
doi = {10.23919/ACC.2017.7963591},
isbn = {978-1-5090-5992-8},
year = {2017},
date = {2017-07-03},
booktitle = {2017 American Control Conference (ACC)},
pages = {4141--4146},
publisher = {IEEE},
organization = {IEEE},
abstract = {Minimizing tip-sample interaction force is crucial for the performance of atomic force microscopes when imaging delicate samples. Conventional methods based on jumping mode such as peak force tapping require a prescribed maximum interaction force to detect tip-sample contact. However, due to the presence of drag forces (in aqueous environments), noises and cantilever dynamics, the minimal detectable peak force can be large. This results in large tip-sample interaction forces and hence sample damage. To minimize this force, we propose a method based on induction of surface or probe vibrations to detect contact between cantilever probe tip and sample substrate. To illustrate the effectiveness of the method, we report experimental results for contact detection on a PS-LDPE-12M polymer sample. A topography tracking control algorithm based on the proposed contact detection scheme is also presented.},
keywords = {Algorithms, Control Theory, Experimentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
S Mekid; D Wu; R Hussain; K Youcef-Toumi
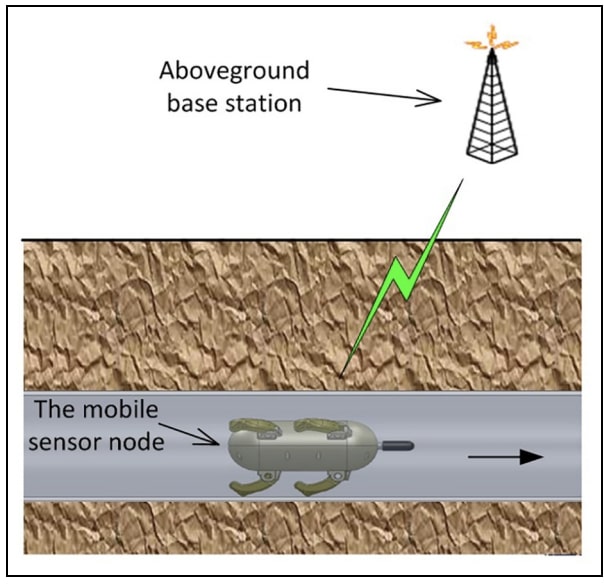
Channel modeling and testing of wireless transmission for underground in-pipe leak and material loss detection Journal Article
In: International Journal of Distributed Sensor Networks, vol. 13, no. 11, pp. 1550147717744715, 2017, ISSN: 1550147717744715.
Abstract | Links | BibTeX | Tags: Fabrication, Inspection, Inspection; repair and intelligence for water distribution pipes, Instrumentation, Mechatronic Design, Nanotechnology, Physical System Modeling
@article{MRL_AFM_Channel_Modeling,
title = {Channel modeling and testing of wireless transmission for underground in-pipe leak and material loss detection},
author = {S Mekid and D Wu and R Hussain and K Youcef-Toumi},
url = {https://doi.org/10.1177/1550147717744715},
doi = {10.1177/1550147717744715},
issn = {1550147717744715},
year = {2017},
date = {2017-01-01},
journal = {International Journal of Distributed Sensor Networks},
volume = {13},
number = {11},
pages = {1550147717744715},
publisher = {Sage},
abstract = {A systematic real-time methodology is adopted for leak detection in underground buried pipes. The wireless communication system is used to analyze the system performance based on the received power by monopole antenna deployed at the receiving side. Instrumentation designed for underground measurement and control such as leak and materials loss detection needs wireless communications to aboveground in both ways and in real-time mode. This constitutes one of the timely and challenging issues of battery-operated systems. The purpose of this work is to characterize the radio transmission between underground buried pipes and base station using multi-layer media including both theoretical and experimental approaches by utilizing various modulation schemes. The objective is to identify the range of operating communication frequencies having lower energy loss, lower resulting bit error rate, and the power needed to transfer packets designed to carry data through the media. This will support the on-device power management to secure large autonomy operations. Experimental tests have shown that the overall received energy was mixed with ambient energy if the latter is sent at the same frequency and that the optimum frequency range used to transmit energy was rather at low frequency range of 100–200 MHz.},
keywords = {Fabrication, Inspection, Inspection; repair and intelligence for water distribution pipes, Instrumentation, Mechatronic Design, Nanotechnology, Physical System Modeling},
pubstate = {published},
tppubtype = {article}
}
2016
Taha Elmokadem; Mohamed Zribi; Kamal Youcef-Toumi
Terminal sliding mode control for the trajectory tracking of underactuated Autonomous Underwater Vehicles Journal Article
In: Ocean Engineering, vol. 129, pp. 613-625, 2016, ISSN: 0029-8018.
Abstract | Links | BibTeX | Tags: Computer vision for autonomous vehicle sensing, Instrumentation, Mechatronic Design, Physical System Modeling, Robotics & Automation
@article{MRL_AFM_Terminal_Trajectory_Tracking,
title = {Terminal sliding mode control for the trajectory tracking of underactuated Autonomous Underwater Vehicles},
author = {Taha Elmokadem and Mohamed Zribi and Kamal Youcef-Toumi},
url = {https://www.sciencedirect.com/science/article/pii/S0029801816304759},
doi = {https://doi.org/10.1016/j.oceaneng.2016.10.032},
issn = {0029-8018},
year = {2016},
date = {2016-11-06},
journal = {Ocean Engineering},
volume = {129},
pages = {613-625},
publisher = {elsevier},
abstract = {The aim of this paper is to develop robust control schemes for the lateral motion of underactuated autonomous underwater vehicles (AUVs). The AUV complex dynamics makes their control a challenging task. These challenges include the AUV nonlinear dynamics, unmodeled dynamics, system uncertainties and environmental disturbances. The objective of the proposed control schemes is to solve the trajectory tracking problem of AUVs. These controllers are designed using the concepts of terminal sliding mode control. The control performance of an example AUV (the REMUS AUV), using the proposed control schemes, is evaluated through computer simulations. The simulation results show that the proposed control schemes work well. Moreover, simulation studies are given to evaluate the performance of the proposed control schemes when bounded disturbances are acting on the vehicle. These studies indicate that the proposed control schemes are robust under bounded disturbances.},
keywords = {Computer vision for autonomous vehicle sensing, Instrumentation, Mechatronic Design, Physical System Modeling, Robotics & Automation},
pubstate = {published},
tppubtype = {article}
}
Bekir Yilbas; Haider Ali; Naseer Al-Aqeeli; Mazen Khaled; Syed Said; Abu Dheir N; Necar Merah; Kamal Youcef-Toumi; Kripa Varanasi
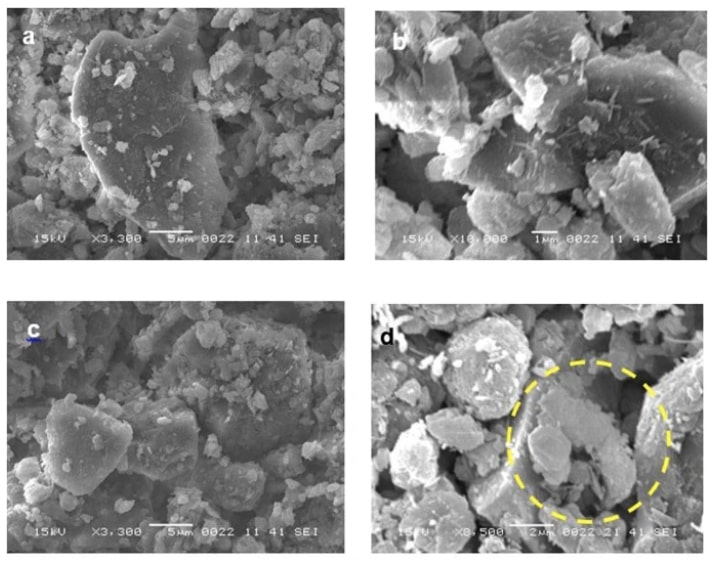
Characterization of Environmental Dust in the Dammam Area and Mud After-Effects on Bisphenol-A Polycarbonate Sheets Journal Article
In: Scientific Reports, vol. 6, pp. 24308, 2016, ISSN: 24308.
Abstract | Links | BibTeX | Tags: Data-driven learning for intelligent machine maintenance, Mechatronic Design, Physical System Modeling, Robotics & Automation, Simulation, Visualization
@article{MRL_AFM_Environmental_Dust,
title = {Characterization of Environmental Dust in the Dammam Area and Mud After-Effects on Bisphenol-A Polycarbonate Sheets},
author = {Bekir Yilbas and Haider Ali and Naseer Al-Aqeeli and Mazen Khaled and Syed Said and Abu Dheir N and Necar Merah and Kamal Youcef-Toumi and Kripa Varanasi},
doi = {10.1038/srep24308},
issn = {24308},
year = {2016},
date = {2016-04-16},
journal = {Scientific Reports},
volume = {6},
pages = {24308},
publisher = {Nature},
abstract = {Owing to recent climate changes, dust storms are increasingly common, particularly in the Middle East region. Dust accumulation and subsequent mud formation on solid surfaces in humid environments typically have adverse effects on surface properties such as optical transmittance, surface texture and microhardness. This is usually because the mud, which contains alkaline and ionic species, adheres strongly to the surface, often through chemical bonds and is therefore difficult to remove. In this study, environmental dust and the after-effects of mud formed on a polycarbonate sheet, which is commonly used as a protective glass in photovoltaic cells. Ionic compounds (OH−) are shown to significantly affect the optical, mechanical and textural characteristics of the polycarbonate surface and to increase the adhesion work required to remove the dry mud from the polycarbonate surface upon drying. Such ability to modify characteristics of the polycarbonate surface could address the dust/mud-related limitations of superhydrophobic surfaces.},
keywords = {Data-driven learning for intelligent machine maintenance, Mechatronic Design, Physical System Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {article}
}
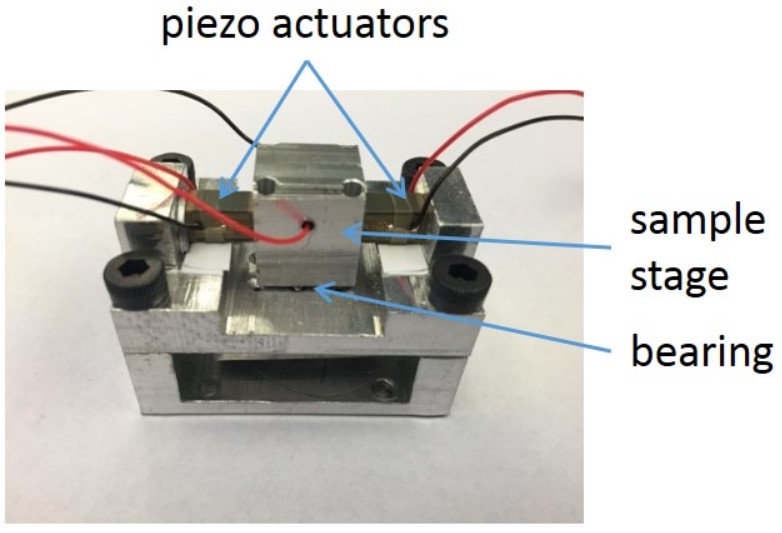
Iman Soltani Bozchalooi; Andrew Careaga Houck; Jwaher M. AlGhamdi; Kamal Youcef-Toumi
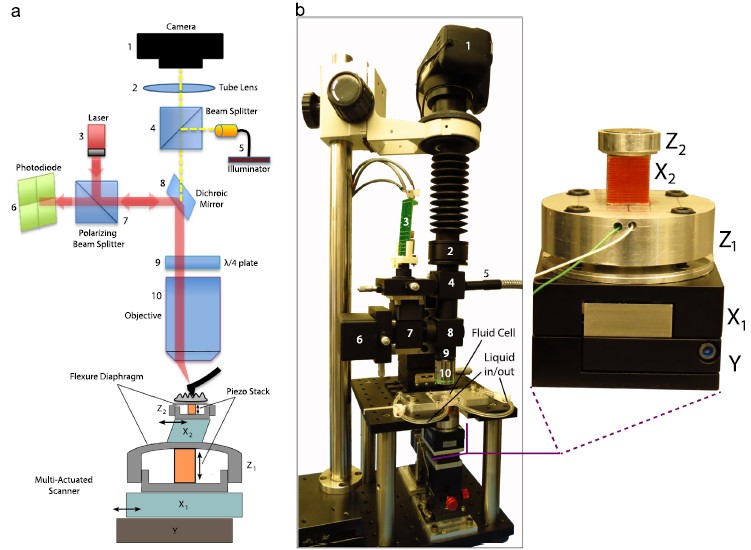
Design and control of multi-actuated atomic force microscope for large-range and high-speed imaging Journal Article
In: vol. 160, pp. 213 - 224, 2016, ISSN: 0304-3991.
Abstract | Links | BibTeX | Tags: Control Theory, Experimentation, Fabrication, Instrumentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Simulation, Visualization
@article{MRL_AFM_LRHS_imaging,
title = {Design and control of multi-actuated atomic force microscope for large-range and high-speed imaging},
author = {Iman Soltani Bozchalooi and Andrew Careaga Houck and Jwaher M. AlGhamdi and Kamal Youcef-Toumi},
url = {http://www.sciencedirect.com/science/article/pii/S0304399115300528 https://www.youtube.com/watch?v=PQ-zE6wA61c},
doi = {https://doi.org/10.1016/j.ultramic.2015.10.016},
issn = {0304-3991},
year = {2016},
date = {2016-01-01},
volume = {160},
pages = {213 - 224},
abstract = {This paper presents the design and control of a high-speed and large-range atomic force microscopy (AFM). A multi-actuation scheme is proposed where several nano-positioners cooperate to achieve the range and speed requirements. A simple data-based control design methodology is presented to effectively operate the AFM scanner components. The proposed controllers compensate for the coupled dynamics and divide the positioning responsibilities between the scanner components. As a result, the multi-actuated scanner behavior is equivalent to that of a single X–Y–Z positioner with large range and high speed. The scanner of the designed AFM is composed of five nano-positioners, features 6μm out-of-plane and 120μm lateral ranges and is capable of high-speed operation. The presented AFM has a modular design with laser spot size of 3.5μm suitable for small cantilever, an optical view of the sample and probe, a conveniently large waterproof sample stage and a 20MHz data throughput for high resolution image acquisition at high imaging speeds. This AFM is used to visualize etching of calcite in a solution of sulfuric acid. Layer-by-layer dissolution and pit formation along the crystalline lines in a low pH environment is observed in real time.},
keywords = {Control Theory, Experimentation, Fabrication, Instrumentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Simulation, Visualization},
pubstate = {published},
tppubtype = {article}
}
2014

David Donghyun Kim; You Wu; Antoine Noel; Kamal Youcef-Toumi
RIM Propeller for Micro Autonomous Underwater Vehicles Proceedings Article
In: ASME 2014 Dynamic Systems and Control Conference, ASME ASME, 2014, ISBN: 978-0-7918-4620-9.
Abstract | Links | BibTeX | Tags: Computer vision for autonomous vehicle sensing, Control Theory, Experimentation, Fabrication, intelligent systems, Mechatronic Design, Simulation
@inproceedings{MRL_AVS_AUV_RIM_Control,
title = {RIM Propeller for Micro Autonomous Underwater Vehicles},
author = {David Donghyun Kim and You Wu and Antoine Noel and Kamal Youcef-Toumi},
url = {https://asmedigitalcollection.asme.org/DSCC/proceedings/DSCC2014/46209/V003T44A005/229722},
doi = {10.1115/DSCC2014-6282},
isbn = {978-0-7918-4620-9},
year = {2014},
date = {2014-12-19},
booktitle = {ASME 2014 Dynamic Systems and Control Conference},
publisher = {ASME},
organization = {ASME},
abstract = {Micro autonomous underwater vehicles (AUVs) need small-scale, powerful and safe propulsion systems especially when they are performing missions in pipes and other confined environments. However, the most conventional propulsion systems do not satisfy all three requirements: small, powerful and safe. A micro propulsion system meeting those requirements are developed based on the RIM propeller concept. It is compact and powerful; the complete motor-propeller assembly is 33mm in diameter, 12mm in depth and 16g in weight, and it is capable of producing 0.4N thrust in static water given a 7.1W power input. The paper presents the design, manufacturing and integration of the micro RIM propeller in an AUV.},
keywords = {Computer vision for autonomous vehicle sensing, Control Theory, Experimentation, Fabrication, intelligent systems, Mechatronic Design, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
2013
Ajay Deshpande; Sanjay E Sarma; Kamal Youcef-Toumi; Samir Mekid
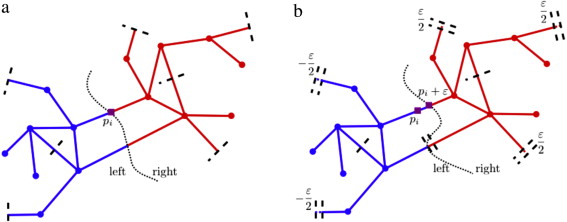
Optimal coverage of an infrastructure network using sensors with distance-decaying sensing quality Journal Article
In: Automatica, vol. 49, no. 11, pp. 3351-3358, 2013, ISSN: 0005-1098.
Abstract | Links | BibTeX | Tags: Experimentation, Fabrication, Instrumentation, Mechatronic Design, Modeling; sizing and control of smart grids, Physical System Modeling
@article{MRL_AFM_Distance_Decaying_Sensors,
title = {Optimal coverage of an infrastructure network using sensors with distance-decaying sensing quality},
author = {Ajay Deshpande and Sanjay E Sarma and Kamal Youcef-Toumi and Samir Mekid},
url = {https://www.sciencedirect.com/science/article/pii/S0005109813003774},
doi = {https://doi.org/10.1016/j.automatica.2013.07.029},
issn = {0005-1098},
year = {2013},
date = {2013-08-27},
journal = {Automatica},
volume = {49},
number = {11},
pages = {3351-3358},
publisher = {elsevier},
abstract = {Motivated by recent applications of wireless sensor networks in monitoring infrastructure networks, we address the problem of optimal coverage of infrastructure networks using sensors whose sensing performance decays with distance. We show that this problem can be formulated as a continuous p-median problem on networks. The literature has addressed the discrete p-median problem on networks and in continuum domains, and the continuous p-median problem in continuum domains extensively. However, in-depth analysis of the continuous p-median problem on networks has been lacking. With the sensing performance model that decays with distance, each sensor covers a region equivalent to its Voronoi partition on the network in terms of the shortest path distance metric. Using Voronoi partitions, we define a directional partial derivative of the coverage metric with respect to a sensor’s location. We then propose a gradient descent algorithm to obtain a locally optimal solution with guaranteed convergence. The quality of an optimal solution depends on the choice of the initial configuration of sensors. We obtain an initial configuration using two approaches: by solving the discrete p-median problem on a lumped network and by random sampling. We consider two methods of random sampling: uniform sampling and D2-sampling. The first approach with the initial solution of the discrete p-median problem leads to the best coverage performance for large networks, but at the cost of high running time. We also observe that the gradient descent on the initial solution with the D2-sampling method yields a solution that is within at most 7% of the previous solution and with much shorter running time.},
keywords = {Experimentation, Fabrication, Instrumentation, Mechatronic Design, Modeling; sizing and control of smart grids, Physical System Modeling},
pubstate = {published},
tppubtype = {article}
}
2011
Vijay Shilpiekandula; Kamal Youcef-Toumi
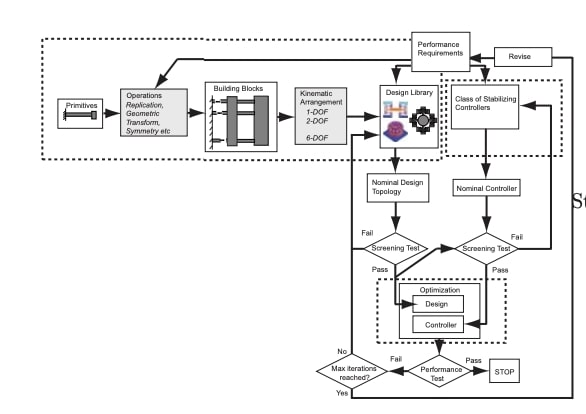
Integrated Design and Control of Flexure-Based Nanopositioning Systems — Part I: Methodology Proceedings Article
In: pp. 9406-9412, IFAC, 2011, ISSN: 1474-6670, (18th IFAC World Congress).
Abstract | Links | BibTeX | Tags: Control Theory, Mechatronic Design, Nanotechnology, Physical System Modeling, Robot operated modular fixtures, Simulation
@inproceedings{MRL_AFM_Flexure_Nanopositioning_Methodology,
title = {Integrated Design and Control of Flexure-Based Nanopositioning Systems — Part I: Methodology},
author = {Vijay Shilpiekandula and Kamal Youcef-Toumi},
url = {https://www.sciencedirect.com/science/article/pii/S1474667016451232},
doi = {https://doi.org/10.3182/20110828-6-IT-1002.03796},
issn = {1474-6670},
year = {2011},
date = {2011-09-01},
journal = {IFAC Proceedings Volumes},
volume = {44},
number = {1},
pages = {9406-9412},
publisher = {IFAC},
abstract = {Abstract
Flexure-based mechanisms, also referred to as flexures, are widely being used as motion-guidance, or bearing, elements in applications requiring multi-degree-of-freedom positioning and alignment. Unlike friction-bearings (such as sliding or rolling contact bearings), flexures can be designed to offer, to a large extent, reliable linear elastic motion with a high resolution (on the order of nanometers) over small ranges of motion (on order of micrometers). Example applications include positioning a probe or sample in atomic force microscopy, alignment of tool and sample in stamping processes, and fine-positioning of wafers and masks in semiconductor manufacturing. These applications are often required satisfy critical functional requirements, such as load-capacity, bandwidth, resolution, and range. A systematic approach is needed to simultaneously address the design and control challenges involved, starting from the initial design concept generation stage to the final control implementation and testing. In this paper, we present an integrated design and control method for implementing flexure-based nanopositioning systems. We discuss the need for varying design topology and order of a controller in design and control optimization. An automation engine generates a set of flexure-based design topologies and also controllers of varying order in the optimization. A simple 1-DOF example is worked out to illustrate the steps involved in using this methodology. The outcome of the exercise is a novel design topology, with it shape and size optimized, and a controller synthesized such that a desired control bandwidth and design requirements of strength and modal separation are met.},
note = {18th IFAC World Congress},
keywords = {Control Theory, Mechatronic Design, Nanotechnology, Physical System Modeling, Robot operated modular fixtures, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
Flexure-based mechanisms, also referred to as flexures, are widely being used as motion-guidance, or bearing, elements in applications requiring multi-degree-of-freedom positioning and alignment. Unlike friction-bearings (such as sliding or rolling contact bearings), flexures can be designed to offer, to a large extent, reliable linear elastic motion with a high resolution (on the order of nanometers) over small ranges of motion (on order of micrometers). Example applications include positioning a probe or sample in atomic force microscopy, alignment of tool and sample in stamping processes, and fine-positioning of wafers and masks in semiconductor manufacturing. These applications are often required satisfy critical functional requirements, such as load-capacity, bandwidth, resolution, and range. A systematic approach is needed to simultaneously address the design and control challenges involved, starting from the initial design concept generation stage to the final control implementation and testing. In this paper, we present an integrated design and control method for implementing flexure-based nanopositioning systems. We discuss the need for varying design topology and order of a controller in design and control optimization. An automation engine generates a set of flexure-based design topologies and also controllers of varying order in the optimization. A simple 1-DOF example is worked out to illustrate the steps involved in using this methodology. The outcome of the exercise is a novel design topology, with it shape and size optimized, and a controller synthesized such that a desired control bandwidth and design requirements of strength and modal separation are met.
2010
Pablo Valdivia y Alvarado; Stephanie Chin; Winston Larson; Anirban Mazumdar; Kamal Youcef-Toumi
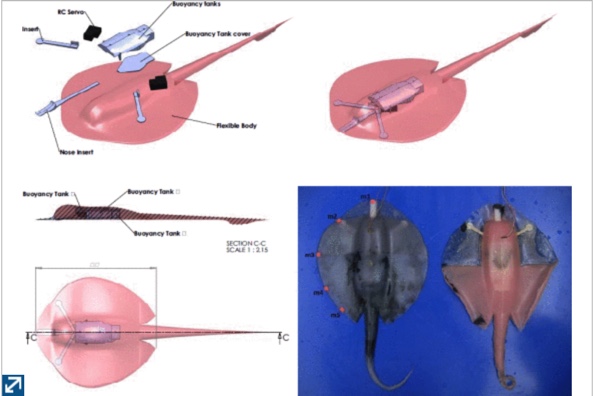
A soft body under-actuated approach to multi degree of freedom biomimetic robots: A stingray example Proceedings Article
In: 2010 3rd IEEE RAS EMBS International Conference on Biomedical Robotics and Biomechatronics, pp. 473-478, IEEE IEEE, 2010, ISBN: 978-1-4244-7709-8.
Abstract | Links | BibTeX | Tags: Biomimetic robotic fish for underwater monitoring, Experimentation, Mechatronic Design, Physical System Modeling, Robotics and Automation, Simulation, Visualization
@inproceedings{MRL_BRF_Multi_DOF_Stingray,
title = {A soft body under-actuated approach to multi degree of freedom biomimetic robots: A stingray example},
author = {Pablo Valdivia y Alvarado and Stephanie Chin and Winston Larson and Anirban Mazumdar and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/5627803},
doi = {10.1109/BIOROB.2010.5627803},
isbn = {978-1-4244-7709-8},
year = {2010},
date = {2010-11-11},
booktitle = {2010 3rd IEEE RAS EMBS International Conference on Biomedical Robotics and Biomechatronics},
pages = {473-478},
publisher = {IEEE},
organization = {IEEE},
abstract = {In this paper we present a new application of the methodology our group is developing to design and prototype under-actuated biomimetic robots by determining appropriate body material property distributions. When excited, flexible bodies with proper anisotropic material distributions display modes of vibration that mimic required locomotion kinematics and require minimal actuation. Our previous prototypes explored simple two dimensional applications for fish-like swimming. In this paper, the three dimensional vibrational kinematics of a stingray are explored. A simple design is explained, and corresponding prototypes are presented along with preliminary performance data. Our methodology shows great promise to develop simple, robust, and inexpensive mobile robots that can efficiently accomplish locomotion.},
keywords = {Biomimetic robotic fish for underwater monitoring, Experimentation, Mechatronic Design, Physical System Modeling, Robotics and Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}