@inproceedings{MRL_BRF_Multi_DOF_Stingray,
title = {A soft body under-actuated approach to multi degree of freedom biomimetic robots: A stingray example},
author = {Pablo Valdivia y Alvarado and Stephanie Chin and Winston Larson and Anirban Mazumdar and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/5627803},
doi = {10.1109/BIOROB.2010.5627803},
isbn = {978-1-4244-7709-8},
year = {2010},
date = {2010-11-11},
booktitle = {2010 3rd IEEE RAS EMBS International Conference on Biomedical Robotics and Biomechatronics},
pages = {473-478},
publisher = {IEEE},
organization = {IEEE},
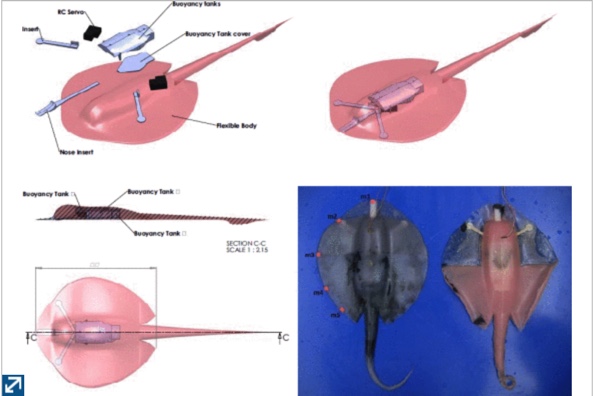
abstract = {In this paper we present a new application of the methodology our group is developing to design and prototype under-actuated biomimetic robots by determining appropriate body material property distributions. When excited, flexible bodies with proper anisotropic material distributions display modes of vibration that mimic required locomotion kinematics and require minimal actuation. Our previous prototypes explored simple two dimensional applications for fish-like swimming. In this paper, the three dimensional vibrational kinematics of a stingray are explored. A simple design is explained, and corresponding prototypes are presented along with preliminary performance data. Our methodology shows great promise to develop simple, robust, and inexpensive mobile robots that can efficiently accomplish locomotion.},
keywords = {Biomimetic robotic fish for underwater monitoring, Experimentation, Mechatronic Design, Physical System Modeling, Robotics and Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}