
Mechatronics Research Lab Publications
List still being populated due to webpage maintenance
2019

Juan Heredia; Jonathan Tirado; Vladislav Panov; Miguel Altamirano Cabrera; Kamal Youcef-Toumi; Dzmitry Tsetserukou
RecyGlide: A Forearm-Worn Multi-Modal Haptic Display Aimed to Improve User VR Immersion Submission Proceedings Article
In: 25th ACM Symposium on Virtual Reality Software and Technology, pp. 1-2, Association for Computing Machinery, 2019, ISBN: 9781450370011.
Abstract | Links | BibTeX | Tags: Computational Intelligence, Control Theory, Data-driven learning for intelligent machine maintenance, Experimentation, intelligent systems, Mechatronic Design, Simulation, Visualization
@inproceedings{MRL_AFM_VR_Multi_Modal_Display,
title = {RecyGlide: A Forearm-Worn Multi-Modal Haptic Display Aimed to Improve User VR Immersion Submission},
author = {Juan Heredia and Jonathan Tirado and Vladislav Panov and Miguel Altamirano Cabrera and Kamal Youcef-Toumi and Dzmitry Tsetserukou},
url = {https://doi.org/10.1145/3359996.3364759},
doi = {10.1145/3359996.3364759},
isbn = {9781450370011},
year = {2019},
date = {2019-11-01},
booktitle = {25th ACM Symposium on Virtual Reality Software and Technology},
pages = {1-2},
publisher = {Association for Computing Machinery},
abstract = {Haptic devices have been employed to immerse users in VR environments. In particular, hand and finger haptic devices have been deeply developed. However, this type of devices occludes hand detection for some tracking systems, or, for some other tracking systems, it is uncomfortable for the users to wear two different devices (haptic and tracking device) on both hands. We introduce RecyGlide, a novel wearable multimodal display located at the forearm. The RecyGlide is composed of inverted five-bar linkages with 2 degrees of freedom (DoF) and vibration motors (see Fig. 1.(a). The device provides multimodal tactile feedback such as slippage, force vector, pressure, and vibration. We tested the discrimination ability of monomodal and multimodal stimuli patterns on the forearm and confirmed that the multimodal patterns have higher recognition rate. This haptic device was used in VR applications, and we proved that it enhances VR experience and makes it more interactive.},
keywords = {Computational Intelligence, Control Theory, Data-driven learning for intelligent machine maintenance, Experimentation, intelligent systems, Mechatronic Design, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
You Wu; Elizabeth Mittmann; Crystal Winston; Kamal Youcef-Toumi
A Practical Minimalism Approach to In-pipe Robot Localization Proceedings Article
In: 2019 American Control Conference (ACC), pp. 3180-3187, IEEE IEEE, 2019, ISBN: 978-1-5386-7926-5.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Pipe_Robot_Localization,
title = {A Practical Minimalism Approach to In-pipe Robot Localization},
author = {You Wu and Elizabeth Mittmann and Crystal Winston and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/8814648},
doi = {10.23919/ACC.2019.8814648},
isbn = {978-1-5386-7926-5},
year = {2019},
date = {2019-08-19},
booktitle = {2019 American Control Conference (ACC)},
pages = {3180-3187},
publisher = {IEEE},
organization = {IEEE},
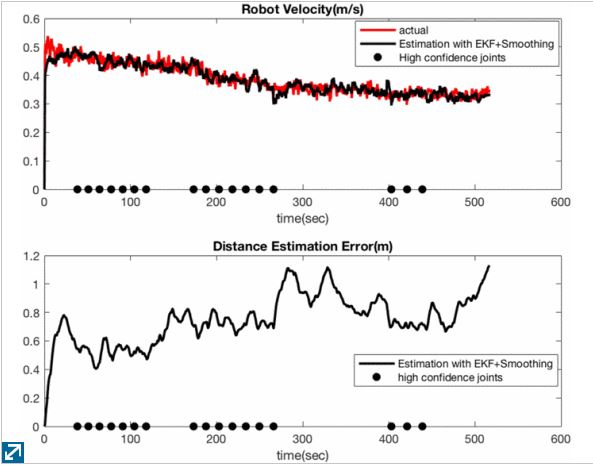
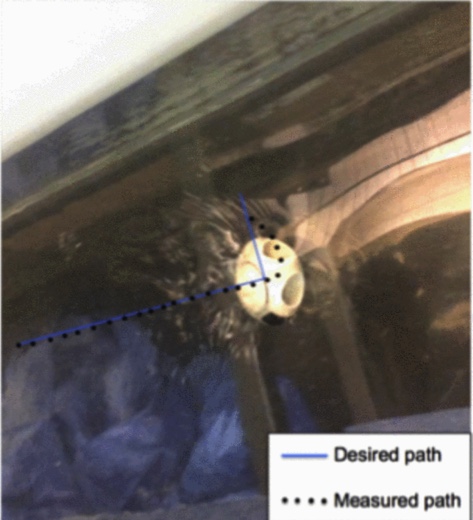
abstract = {Water pipe leakage is a common and significant problem around the world. In recent years, an increasing amount of effort has been put into developing effective leak detection solutions for water pipes. Among them, the pressure gradient based method developed at the Massachusetts Institute of Technology excels for its sensitivity in low pressure, small diameter pipes. It can also work in both plastic and metallic pipes. However, in order for leaks detected to be fixed, one must also know the locations of the leaks. In addition, sensing the robot's location via GPS or remote sensors requires greater power and relies on certain ground properties. Thus this paper sets out to localize the robot using only the on board sensors which are an IMU, gyro, and the leak sensors. Through pipe joint measurement and the extended Kalman filter simulations show the tracking error is about 0.5% of the total distance of the robotic inspection. With a minimal number of additional leak sensors added, a complementary method was developed to function in more heavily tuberculated pipes.},
keywords = {Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
Ishara Paranawithana; Zhong Hoo Chau; Liangjing Yang; Zhong Chen; Kamal Youcef-Toumi; U-Xuan Tan
Automatic Targeting of Plant Cells via Cell Segmentation and Robust Scene-Adaptive Tracking Proceedings Article
In: 2019 International Conference on Robotics and Automation (ICRA), pp. 7116-7122, IEEE IEEE, 2019, ISBN: 978-1-5386-6027-0.
Abstract | Links | BibTeX | Tags: Algorithms, Biological device for cancer cell characterization, Computational Intelligence, Experimentation, Mechatronic Design, Nanotechnology, Visualization
@inproceedings{MRL_AFM_Cell_Segment_Targeting,
title = {Automatic Targeting of Plant Cells via Cell Segmentation and Robust Scene-Adaptive Tracking},
author = {Ishara Paranawithana and Zhong Hoo Chau and Liangjing Yang and Zhong Chen and Kamal Youcef-Toumi and U-Xuan Tan},
url = {https://ieeexplore.ieee.org/document/8793944},
doi = {10.1109/ICRA.2019.8793944},
isbn = {978-1-5386-6027-0},
year = {2019},
date = {2019-08-12},
booktitle = {2019 International Conference on Robotics and Automation (ICRA)},
pages = {7116-7122},
publisher = {IEEE},
organization = {IEEE},
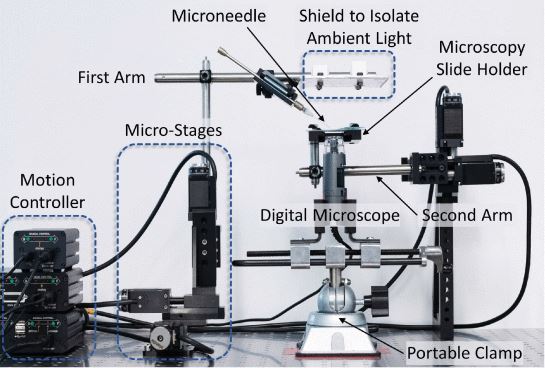
abstract = {Automatic targeting of plant cells to perform tasks like extraction of chloroplast is often desired in the study of plant biology. Hence, this paper proposes an improved cell segmentation method combined with a robust tracking algorithm for vision-guided micromanipulation in plant cells. The objective of this work is to develop an automatic plant cell detection and localization technique to complete the automated workflow for plant cell manipulation. The complex structural properties of plant cells make both segmentation of cells and visual tracking of the microneedle immensely challenging, unlike single animal cell applications. Thus, an improved version of watershed segmentation with adaptive thresholding is proposed to detect the plant cells without the need for staining of the cells or additional tedious preparations. To manipulate the needle to reach the identified centroid of the cells, tracking of the needle tip is required. Visual and motion information from two data sources namely, template tracking and projected manipulator trajectory are combined using score-based normalized weighted averaging to continuously track the microneedle. The selection of trackers is influenced by their complementary nature as the former and latter are individually robust against physical and visual uncertainties, respectively. Experimental results validate the effectiveness of the proposed method by detecting plant cell centroids accurately, tracking the microneedle constantly and reaching the plant cell of interest despite the presence of visual disturbances.},
keywords = {Algorithms, Biological device for cancer cell characterization, Computational Intelligence, Experimentation, Mechatronic Design, Nanotechnology, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
Fangzhou Xia; Chen Yang; Yi Wang; Kamal Youcef-Toumi; Christoph Reuter; Tzvetan Ivanov; Mathias Holz; Ivo W Rangelow
Lights Out! Nano-Scale Topography Imaging of Sample Surface in Opaque Liquid Environments with Coated Active Cantilever Probes Journal Article
In: Nanomaterials, vol. 9, no. 7, pp. 1013, 2019.
Abstract | Links | BibTeX | Tags: Experimentation, Fabrication, Full text available online, Instrumentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Visualization
@article{MRL_AFM_coated_probe,
title = {Lights Out! Nano-Scale Topography Imaging of Sample Surface in Opaque Liquid Environments with Coated Active Cantilever Probes},
author = {Fangzhou Xia and Chen Yang and Yi Wang and Kamal Youcef-Toumi and Christoph Reuter and Tzvetan Ivanov and Mathias Holz and Ivo W Rangelow},
url = {https://www.ncbi.nlm.nih.gov/pmc/articles/PMC6669515/},
doi = {10.3390/nano9071013},
year = {2019},
date = {2019-07-09},
journal = {Nanomaterials},
volume = {9},
number = {7},
pages = {1013},
publisher = {Multidisciplinary Digital Publishing Institute},
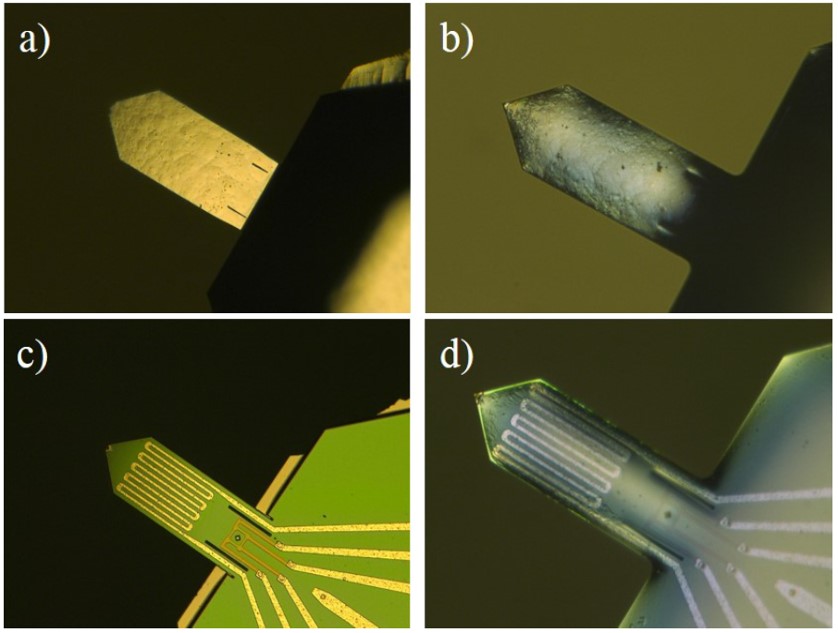
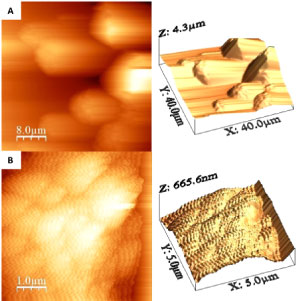
abstract = {Atomic force microscopy is a powerful topography imaging method used widely in nanoscale metrology and manipulation. A conventional Atomic Force Microscope (AFM) utilizes an optical lever system typically composed of a laser source, lenses and a four quadrant photodetector to amplify and measure the deflection of the cantilever probe. This optical method for deflection sensing limits the capability of AFM to obtaining images in transparent environments only. In addition, tapping mode imaging in liquid environments with transparent sample chamber can be difficult for laser-probe alignment due to multiple different refraction indices of materials. Spurious structure resonance can be excited from piezo actuator excitation. Photothermal actuation resolves the resonance confusion but makes optical setup more complicated. In this paper, we present the design and fabrication method of coated active scanning probes with piezoresistive deflection sensing, thermomechanical actuation and thin photoresist polymer surface coating. The newly developed probes are capable of conducting topography imaging in opaque liquids without the need of an optical system. The selected coating can withstand harsh chemical environments with high acidity (e.g., 35% sulfuric acid). The probes are operated in various opaque liquid environments with a custom designed AFM system to demonstrate the imaging performance. The development of coated active probes opens up possibilities for observing samples in their native environments.},
keywords = {Experimentation, Fabrication, Full text available online, Instrumentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Visualization},
pubstate = {published},
tppubtype = {article}
}
Ali Jahanian; Quang H Le; Kamal Youcef-Toumi; Dzmitry Tsetserukou
See the E-Waste! Training Visual Intelligence to See Dense Circuit Boards for Recycling Proceedings Article
In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, 2019.
Abstract | Links | BibTeX | Tags: Algorithms, Automated cellphone recycling, Computational Intelligence, Experimentation, Mechatronic Design, Robotics & Automation, Visualization
@inproceedings{MRL_AFM_Training_CB_Recycling,
title = {See the E-Waste! Training Visual Intelligence to See Dense Circuit Boards for Recycling},
author = {Ali Jahanian and Quang H Le and Kamal Youcef-Toumi and Dzmitry Tsetserukou},
url = {https://openaccess.thecvf.com/content_CVPRW_2019/html/cv4gc/Jahanian_See_the_E-Waste_Training_Visual_Intelligence_to_See_Dense_Circuit_CVPRW_2019_paper.html},
year = {2019},
date = {2019-06-01},
booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops},
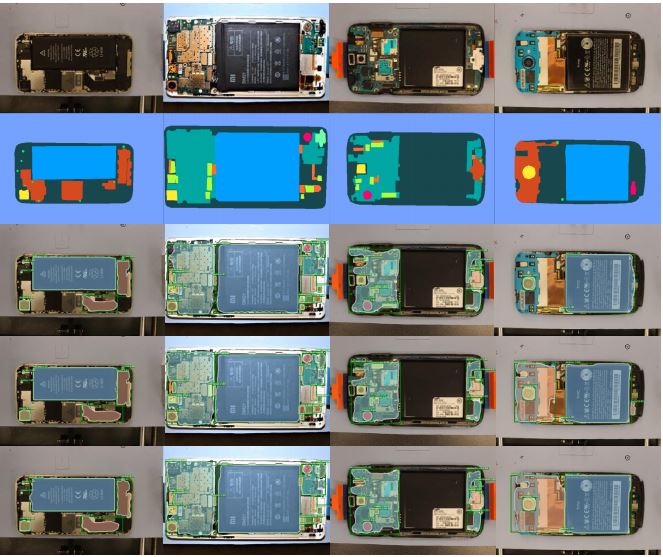
abstract = {The state-of-the-art semantic segmentation and object detection deep learning models are taking the leap to generalize and leverage automation, but have yet to be useful in real-world tasks such as those in dense circuit board robotic manipulation. Consider a cellphone circuit board that because of small components and a couple of hundred microns gaps between them challenges any manipulation task. For effective automation and robotics usage in manufacturing, we tackle this problem by building a convolutional neural networks optimized for multi-task learning of instance semantic segmentation and detection while accounting for crisp boundaries of small components inside dense boards. We explore the feature learning mechanism, and add the auxiliary task of boundary detection to encourage the network to learn the objects' geometric properties along with the other objectives. We examine the performance of the networks in the visual tasks (separately and all together), and the extent of generalization on the recycling phone dataset. Our network outperformed the state-of-the-art in the visual tasks while maintaining the high speed of computation. To facilitate this globally concerning topic, we provide a benchmark for Ewaste visual tasks research, and publicize our collected dataset and code, as well as demos on our in-lab robot at https://github.com/MIT-MRL/recybot. pubstate = published},
keywords = {Algorithms, Automated cellphone recycling, Computational Intelligence, Experimentation, Mechatronic Design, Robotics & Automation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
2017
Ivo W Rangelow; Tzvetan Ivanov; Ahmad Ahmad; Marcus Kaestner; Claudia Lenk; Iman Soltani Bozchalooi; Fangzhou Xia; Kamal Youcef-Toumi; Mathias Holz; Alexander Reum
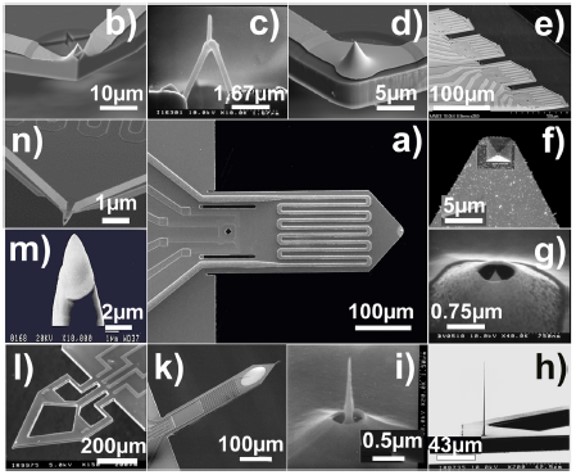
Review Article: Active scanning probes: A versatile toolkit for fast imaging and emerging nanofabrication Journal Article
In: Journal of Vacuum Science & Technology B, Nanotechnology and Microelectronics: Materials, Processing, Measurement, and Phenomena, vol. 35, no. 6, pp. 06G101, 2017.
Abstract | Links | BibTeX | Tags: Instrumentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Visualization
@article{MRL_AFM_active_probe_review,
title = {Review Article: Active scanning probes: A versatile toolkit for fast imaging and emerging nanofabrication},
author = {Ivo W Rangelow and Tzvetan Ivanov and Ahmad Ahmad and Marcus Kaestner and Claudia Lenk and Iman Soltani Bozchalooi and Fangzhou Xia and Kamal Youcef-Toumi and Mathias Holz and Alexander Reum},
url = {https://avs.scitation.org/doi/full/10.1116/1.4992073},
doi = {10.1116/1.4992073},
year = {2017},
date = {2017-11-03},
journal = {Journal of Vacuum Science & Technology B, Nanotechnology and Microelectronics: Materials, Processing, Measurement, and Phenomena},
volume = {35},
number = {6},
pages = {06G101},
publisher = {American Vacuum Society},
abstract = {With the recent advances in the field of nanotechnology, measurement and manipulation requirements at the nanoscale have become more stringent than ever before. In atomic force microscopy, high-speed performance alone is not sufficient without considerations of other aspects of the measurement task, such as the feature aspect ratio, required range, or acceptable probe-sample interaction forces. In this paper, the authors discuss these requirements and the research directions that provide the highest potential in meeting them. The authors elaborate on the efforts toward the downsizing of self-sensed and self-actuated probes as well as on upscaling by active cantilever arrays. The authors present the fabrication process of active probes along with the tip customizations carriedout targeting specific application fields. As promising application in scope of nanofabrication, field emission scanning probe lithography is introduced. The authors further discuss their control and design approach. Here, microactuators, e.g., multilayer microcantilevers, and macroactuators, e.g., flexure scanners, are combined in order to simultaneously meet both the range and speed requirements of a new generation of scanning probe microscopes.},
keywords = {Instrumentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Visualization},
pubstate = {published},
tppubtype = {article}
}
2016
Bekir Yilbas; Haider Ali; Naseer Al-Aqeeli; Mazen Khaled; Syed Said; Abu Dheir N; Necar Merah; Kamal Youcef-Toumi; Kripa Varanasi
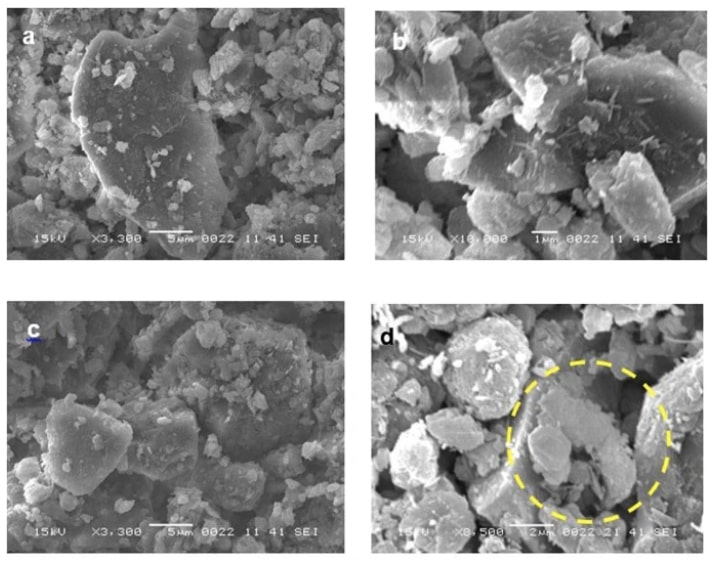
Characterization of Environmental Dust in the Dammam Area and Mud After-Effects on Bisphenol-A Polycarbonate Sheets Journal Article
In: Scientific Reports, vol. 6, pp. 24308, 2016, ISSN: 24308.
Abstract | Links | BibTeX | Tags: Data-driven learning for intelligent machine maintenance, Mechatronic Design, Physical System Modeling, Robotics & Automation, Simulation, Visualization
@article{MRL_AFM_Environmental_Dust,
title = {Characterization of Environmental Dust in the Dammam Area and Mud After-Effects on Bisphenol-A Polycarbonate Sheets},
author = {Bekir Yilbas and Haider Ali and Naseer Al-Aqeeli and Mazen Khaled and Syed Said and Abu Dheir N and Necar Merah and Kamal Youcef-Toumi and Kripa Varanasi},
doi = {10.1038/srep24308},
issn = {24308},
year = {2016},
date = {2016-04-16},
journal = {Scientific Reports},
volume = {6},
pages = {24308},
publisher = {Nature},
abstract = {Owing to recent climate changes, dust storms are increasingly common, particularly in the Middle East region. Dust accumulation and subsequent mud formation on solid surfaces in humid environments typically have adverse effects on surface properties such as optical transmittance, surface texture and microhardness. This is usually because the mud, which contains alkaline and ionic species, adheres strongly to the surface, often through chemical bonds and is therefore difficult to remove. In this study, environmental dust and the after-effects of mud formed on a polycarbonate sheet, which is commonly used as a protective glass in photovoltaic cells. Ionic compounds (OH−) are shown to significantly affect the optical, mechanical and textural characteristics of the polycarbonate surface and to increase the adhesion work required to remove the dry mud from the polycarbonate surface upon drying. Such ability to modify characteristics of the polycarbonate surface could address the dust/mud-related limitations of superhydrophobic surfaces.},
keywords = {Data-driven learning for intelligent machine maintenance, Mechatronic Design, Physical System Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {article}
}
Iman Soltani Bozchalooi; Andrew Careaga Houck; Jwaher M. AlGhamdi; Kamal Youcef-Toumi
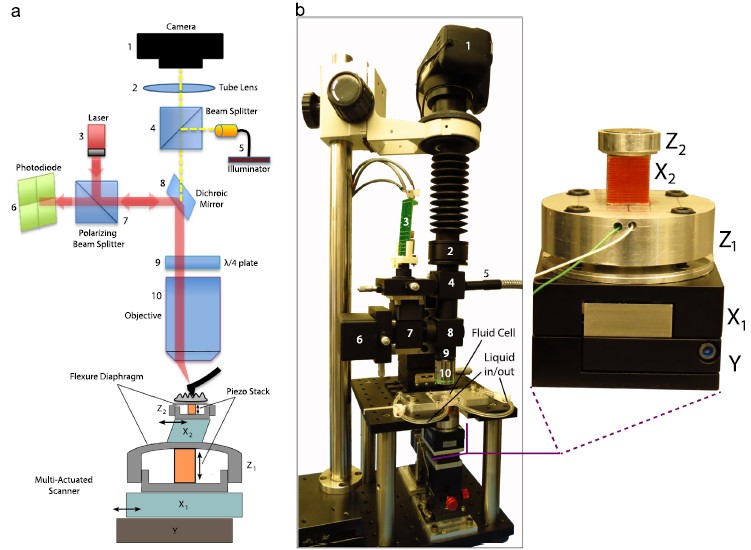
Design and control of multi-actuated atomic force microscope for large-range and high-speed imaging Journal Article
In: vol. 160, pp. 213 - 224, 2016, ISSN: 0304-3991.
Abstract | Links | BibTeX | Tags: Control Theory, Experimentation, Fabrication, Instrumentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Simulation, Visualization
@article{MRL_AFM_LRHS_imaging,
title = {Design and control of multi-actuated atomic force microscope for large-range and high-speed imaging},
author = {Iman Soltani Bozchalooi and Andrew Careaga Houck and Jwaher M. AlGhamdi and Kamal Youcef-Toumi},
url = {http://www.sciencedirect.com/science/article/pii/S0304399115300528 https://www.youtube.com/watch?v=PQ-zE6wA61c},
doi = {https://doi.org/10.1016/j.ultramic.2015.10.016},
issn = {0304-3991},
year = {2016},
date = {2016-01-01},
volume = {160},
pages = {213 - 224},
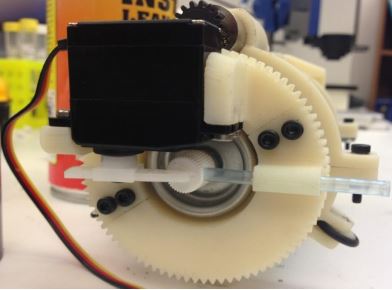
abstract = {This paper presents the design and control of a high-speed and large-range atomic force microscopy (AFM). A multi-actuation scheme is proposed where several nano-positioners cooperate to achieve the range and speed requirements. A simple data-based control design methodology is presented to effectively operate the AFM scanner components. The proposed controllers compensate for the coupled dynamics and divide the positioning responsibilities between the scanner components. As a result, the multi-actuated scanner behavior is equivalent to that of a single X–Y–Z positioner with large range and high speed. The scanner of the designed AFM is composed of five nano-positioners, features 6μm out-of-plane and 120μm lateral ranges and is capable of high-speed operation. The presented AFM has a modular design with laser spot size of 3.5μm suitable for small cantilever, an optical view of the sample and probe, a conveniently large waterproof sample stage and a 20MHz data throughput for high resolution image acquisition at high imaging speeds. This AFM is used to visualize etching of calcite in a solution of sulfuric acid. Layer-by-layer dissolution and pit formation along the crystalline lines in a low pH environment is observed in real time.},
keywords = {Control Theory, Experimentation, Fabrication, Instrumentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Simulation, Visualization},
pubstate = {published},
tppubtype = {article}
}
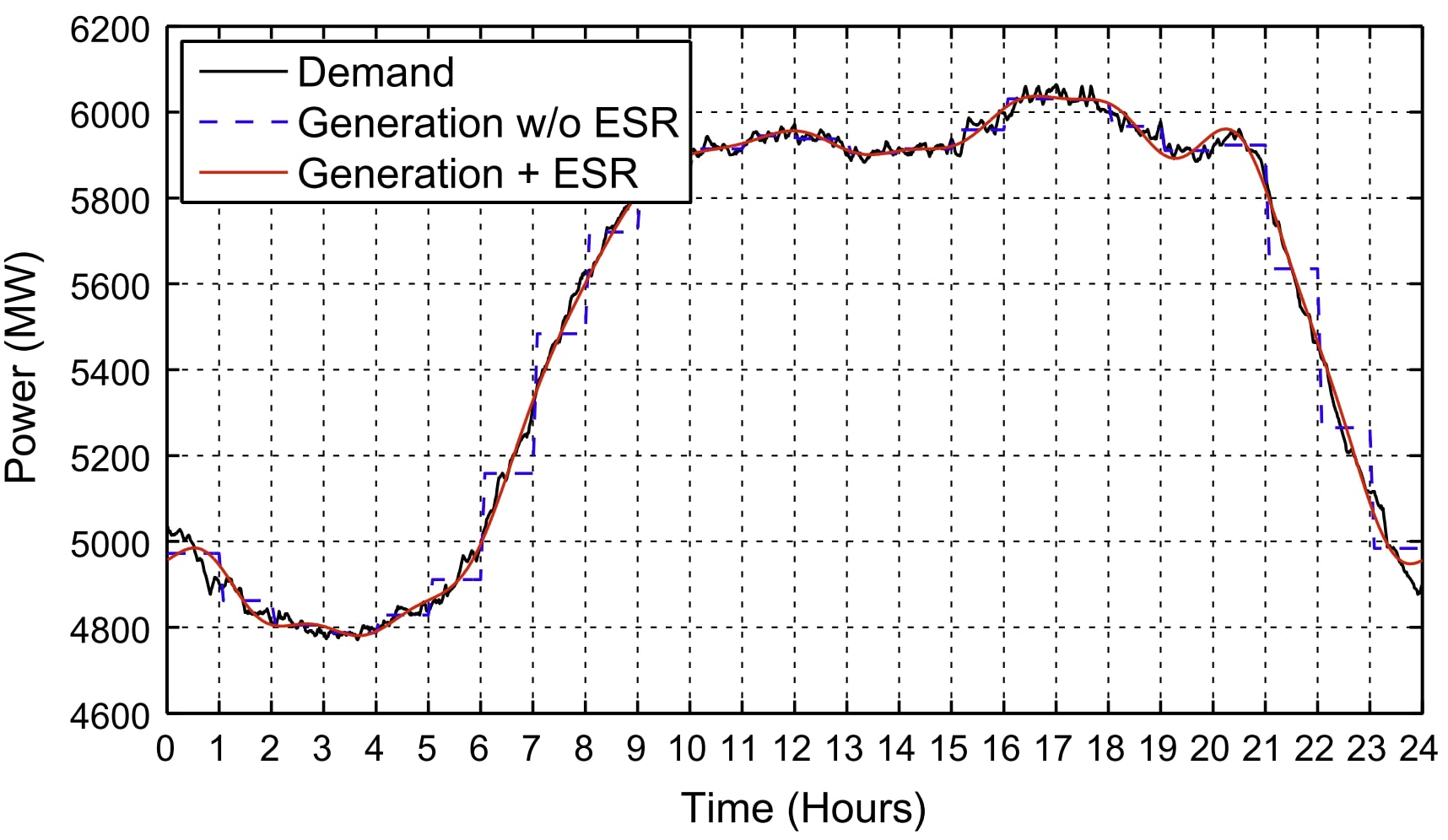
Aramazd Muzhikyan; Amro M Farid; Kamal Youcef-Toumi
Relative merits of load following reserves & energy storage market integration towards power system imbalances Journal Article
In: International Journal of Electrical Power & Energy Systems, vol. 74, pp. 222-229, 2016, ISSN: 0142-0615.
Abstract | Links | BibTeX | Tags: Control Theory, intelligent systems, Modeling; sizing and control for smart grids, Visualization
@article{MRL_Market_Integration_Power_System,
title = {Relative merits of load following reserves & energy storage market integration towards power system imbalances},
author = {Aramazd Muzhikyan and Amro M Farid and Kamal Youcef-Toumi},
url = {https://www.sciencedirect.com/science/article/pii/S0142061515002999},
doi = {https://doi.org/10.1016/j.ijepes.2015.07.013},
issn = {0142-0615},
year = {2016},
date = {2016-01-01},
journal = {International Journal of Electrical Power & Energy Systems},
volume = {74},
pages = {222-229},
publisher = {ScienceDirect},
abstract = {Traditionally, power system balancing operations consist of three consecutive control techniques, namely security-constrained unit commitment (SCUC), security-constrained economic dispatch (SCED), and automatic generation control (AGC). Each of these have their corresponding type of operating reserves. Similarly, energy storage resources (ESRs) may be integrated as energy, load following, or regulation resources. A review of the existing literature shows that most ESR integration studies are focused on a single control function. In contrast, recent work on renewable energy integration has employed the concept of enterprise control where the multiple layers of balancing operations have been integrated into a single model. This paper now uses such an enterprise control model to demonstrate the relative merits of load following reserves and energy storage integrated into the resource scheduling and balancing action layers. The results show that load following reserves and energy storage resources mitigate imbalances in fundamentally different ways. The latter becomes an increasingly effective balancing resource for high net-load variability and small day-ahead market time step.},
keywords = {Control Theory, intelligent systems, Modeling; sizing and control for smart grids, Visualization},
pubstate = {published},
tppubtype = {article}
}
2015
You Wu; Antoine Noel; David Donghyun Kim; Kamal Youcef-Toumi; Rached Ben-Mansour
Design of a maneuverable swimming robot for in-pipe missions Proceedings Article
In: 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 4864-4871, IEEE IEEE, 2015, ISBN: 978-1-4799-9994-1.
Abstract | Links | BibTeX | Tags: Experimentation, Inspection; repair and intelligence for water distribution pipes, intelligent systems, Physical System Modeling, Simulation, Visualization
@inproceedings{MRL_WDP_In_Pipe_Missions,
title = {Design of a maneuverable swimming robot for in-pipe missions},
author = {You Wu and Antoine Noel and David Donghyun Kim and Kamal Youcef-Toumi and Rached Ben-Mansour},
url = {https://ieeexplore.ieee.org/document/7354061},
doi = {10.1109/IROS.2015.7354061},
isbn = {978-1-4799-9994-1},
year = {2015},
date = {2015-12-17},
booktitle = {2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages = {4864-4871},
publisher = {IEEE},
organization = {IEEE},
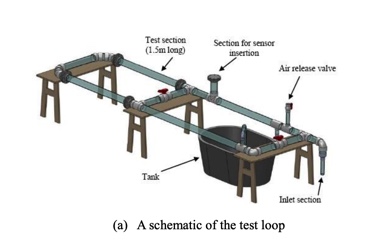
abstract = {Autonomous underwater robots provide opportunities to perform missions in confined environments such as water pipe networks. They can carry sensors in these pipes and perform tasks such as mapping and inspection. Those robots must have a high level of maneuverability in order to navigate through complex networks of pipes with irregularities due to rust and calcite deposition. We propose a fully integrated, untethered robot capable of carrying sensors and maneuver into water pipe networks. The objective of this paper is to present (i) the optimal shape design and (ii) a propulsion system selection and sizing procedure for such robots. A prototype is built to demonstrate the basic elements of maneuverability, including following straight lines and making sharp turns.},
keywords = {Experimentation, Inspection; repair and intelligence for water distribution pipes, intelligent systems, Physical System Modeling, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
Ahmed Owais; Mazen M Khaled; Bekir S Yilbas; Numan Abu-Dheir; Kripa K Varanasi; Kamal Y Toumi
Surface and wetting characteristics of textured bisphenol-A based polycarbonate surfaces: Acetone-induced crystallization texturing methods Journal Article
In: Journal of Applied Polymer Science, vol. 133, no. 14, 2015, ISSN: 43074.
Abstract | Links | BibTeX | Tags: Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation, Visualization
@article{MRL_AFM_Surface_Wetting_Poly_Surfaces,
title = {Surface and wetting characteristics of textured bisphenol-A based polycarbonate surfaces: Acetone-induced crystallization texturing methods},
author = {Ahmed Owais and Mazen M Khaled and Bekir S Yilbas and Numan Abu-Dheir and Kripa K Varanasi and Kamal Y Toumi},
url = {https://onlinelibrary.wiley.com/doi/abs/10.1002/app.43074},
doi = {https://doi.org/10.1002/app.43074},
issn = {43074},
year = {2015},
date = {2015-11-12},
journal = {Journal of Applied Polymer Science},
volume = {133},
number = {14},
publisher = {Wiley},
abstract = {ABSTRACT Polycarbonate (PC) sheet is a promising material for facile patterning to induce hydrophobic self-cleaning and dust repelling properties for photovoltaic panels’ protection. An investigation to texture PC sheet surfaces to develop a self-cleaning structure using solvent induced-crystallization is carried out using acetone. Acetone is applied in both liquid and vapor states to generate a hierarchically structured surface that would improve its contacts angle and therefore improve hydrophobicity. The surface texture is investigated and characterized using atomic force microscopy, contact angle technique (Goniometer), optical microscopy, ultraviolet-visible spectroscopy (UV–vis) and Fourier transform infrared spectroscopy. The findings revealed that the liquid acetone-induced crystallization of PC surface leads to a hierarchal and hydrophobic surface with an average contact angle of 135° and average transmittance <2%. However, the acetone vapor induced-crystallization results in a slightly hydrophilic hierarchal textured surface with high transmittance; in which case, average contact angle of 89° and average transmittance of 69% are achieved. © 2015 Wiley Periodicals, Inc. J. Appl. Polym. Sci. 2016, 133, 43074.},
keywords = {Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation, Visualization},
pubstate = {published},
tppubtype = {article}
}
Bo Jiang; Amro M Farid; Kamal Youcef-Toumi
Impacts of Industrial Baseline Errors on Costs and Social Welfare in the Demand Side Management of Day-Ahead Wholesale Markets Proceedings Article
In: ASME 2015 13th International Conference on Fuel Cell Science, Engineering and Technology, and the ASME 2015 Nuclear Forum, pp. 7390-7395, IEEE IEEE, 2015, ISSN: 1558-3783.
Abstract | Links | BibTeX | Tags: Control Theory, Experimentation, Nanotechnology, Physical System Modeling, Simulation, Visualization
@inproceedings{MRL_WDP_Pipe_Leak_Repair,
title = {Impacts of Industrial Baseline Errors on Costs and Social Welfare in the Demand Side Management of Day-Ahead Wholesale Markets},
author = {Bo Jiang and Amro M Farid and Kamal Youcef-Toumi},
url = {https://asmedigitalcollection.asme.org/ES/proceedings/ES2015/56857/V002T12A003/230063},
doi = {https://doi.org/10.1115/ES2015-49459},
issn = {1558-3783},
year = {2015},
date = {2015-10-27},
booktitle = {ASME 2015 13th International Conference on Fuel Cell Science, Engineering and Technology, and the ASME 2015 Nuclear Forum},
journal = {IEEE Transactions on Automation Science and Engineering},
volume = {15},
number = {4},
pages = {7390-7395},
publisher = {IEEE},
organization = {IEEE},
abstract = {Demand Side Management (DSM},
keywords = {Control Theory, Experimentation, Nanotechnology, Physical System Modeling, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
2014
B N Shapiro; R Adhikari; J Driggers; J Kissel; B Lantz; J Rollins; K Youcef-Toumi
Noise and control decoupling of Advanced LIGO suspensions Journal Article
In: Classical and Quantum Gravity, vol. 32, no. 1, pp. 015004, 2014.
Abstract | Links | BibTeX | Tags: Control Theory, Experimentation, intelligent systems, Physical System Modeling, Simulation, Uncertainty estimation and calibration for modeling, Visualization
@article{MRL_AFM_Noise_Control_Decoupling,
title = {Noise and control decoupling of Advanced LIGO suspensions},
author = {B N Shapiro and R Adhikari and J Driggers and J Kissel and B Lantz and J Rollins and K Youcef-Toumi},
url = {https://doi.org/10.1088/0264-9381/32/1/015004},
doi = {10.1088/0264-9381/32/1/015004},
year = {2014},
date = {2014-12-10},
journal = {Classical and Quantum Gravity},
volume = {32},
number = {1},
pages = {015004},
publisher = {IOP Publishing},
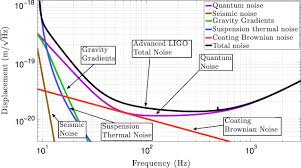
abstract = {Ground-based interferometric gravitational wave observatories such as Advanced LIGO must isolate their optics from ground vibrations with suspension systems to meet their stringent noise requirements. These suspensions typically have very high quality-factor resonances that require active damping. The sensor noise associated with this damping is a potential significant contributor to the sensitivity of these interferometers. This paper introduces a novel scheme for suspension damping that isolates much of this noise and permits greater amounts of damping. It also decouples the damping feedback design from the interferometer control. The scheme works by invoking a change from a local coordinate frame associated with each suspension, to a coordinate frame aligned with the interferometric readout. In this way, degrees of freedom invisible to the readout can employ effective, but noisy damping. The degree of freedom measured by the readout is then damped using low noise interferometer signals, eliminating the need to use the usual noisy sensors. Simulated and experimental results validate the concepts presented in this paper.},
keywords = {Control Theory, Experimentation, intelligent systems, Physical System Modeling, Simulation, Uncertainty estimation and calibration for modeling, Visualization},
pubstate = {published},
tppubtype = {article}
}

Dimitris Chatzigeorgiou; You Wu; Kamal Youcef-Toumi; Rached Ben-Mansour
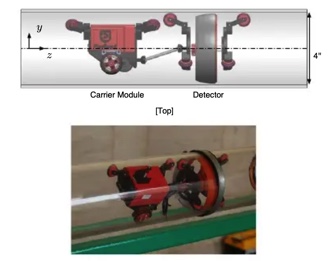
MIT Leak Detector: An in-pipe leak detection robot Proceedings Article
In: 2014 IEEE International Conference on Robotics and Automation (ICRA), pp. 2091-2091, IEEE IEEE, 2014, ISBN: 978-1-4799-3685-4.
Abstract | Links | BibTeX | Tags: Inspection; repair and intelligence for water distribution pipes, Physical Systems Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Leak_Detecting_Robot,
title = {MIT Leak Detector: An in-pipe leak detection robot},
author = {Dimitris Chatzigeorgiou and You Wu and Kamal Youcef-Toumi and Rached Ben-Mansour},
url = {https://ieeexplore.ieee.org/document/6907144},
doi = {10.1109/ICRA.2014.6907144},
isbn = {978-1-4799-3685-4},
year = {2014},
date = {2014-09-24},
booktitle = {2014 IEEE International Conference on Robotics and Automation (ICRA)},
pages = {2091-2091},
publisher = {IEEE},
organization = {IEEE},
abstract = {In this work we present a new in-pipe leak detection robot, the MIT Leak Detector. The system performs autonomous leak detection in gas pipes in a reliable and robust fashion. Detection in based on the presence of a pressure gradient in the neighborhood of the leak. As the MIT Leak Detector travels through pipes, it picks up the pressure gradient in case of leaks via a carefully designed detector. In this work we demonstrate the performance of the system in a lab setup, which consists of 100mm ID pipes containing pressurized air.},
keywords = {Inspection; repair and intelligence for water distribution pipes, Physical Systems Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
Dimitris Chatzigeorgiou; Kamal Youcef-Toumi; Rached Ben-Mansour
Modeling and analysis of an in-pipe robotic leak detector Proceedings Article
In: 2014 IEEE International Conference on Robotics and Automation (ICRA), pp. 3351-3357, IEEE, 2014, ISBN: 978-1-4799-3685-4.
Abstract | Links | BibTeX | Tags: Inspection; repair and intelligence for water distribution pipes, Physical Systems Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Analysis_Leak_Detection,
title = {Modeling and analysis of an in-pipe robotic leak detector},
author = {Dimitris Chatzigeorgiou and Kamal Youcef-Toumi and Rached Ben-Mansour},
url = {https://ieeexplore.ieee.org/abstract/document/6907341},
doi = {10.1109/ICRA.2014.6907341},
isbn = {978-1-4799-3685-4},
year = {2014},
date = {2014-09-24},
booktitle = {2014 IEEE International Conference on Robotics and Automation (ICRA)},
pages = {3351-3357},
publisher = {IEEE},
abstract = {Leakage is the most important factor for unaccounted losses in any pipe network around the world. Most state of the art leak detection systems have limited applicability, lack in reliability and depend on user experience for data extraction. This paper is about a novel system for robotic pipe integrity inspection. Unlike existing systems, detection in based on the presence of a pressure gradient in the neighborhood of a leak. This phenomenon is translated into force measurements via a specially designed and instrumented mechanical embodiment (detector). In this paper an analytic dynamic model of the robotic detector is derived and studied. A prototype is built and the main concepts are validated via experiments.},
keywords = {Inspection; repair and intelligence for water distribution pipes, Physical Systems Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
Soltani I Bozchalooi; Kamal Youcef-Toumi
Control design for division and compensation with application to high-speed/large-range nano-positioning Proceedings Article
In: 2014 American Control Conference, pp. 1643-1648, IEEE IEEE, 2014, ISBN: 978-1-4799-3274-0.
Abstract | Links | BibTeX | Tags: Control Theory, Experimentation, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation, Visualization
@inproceedings{MRL_AFM_Nano_Positioning_Control,
title = {Control design for division and compensation with application to high-speed/large-range nano-positioning},
author = {Soltani I Bozchalooi and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/6859262},
doi = {10.1109/ACC.2014.6859262},
isbn = {978-1-4799-3274-0},
year = {2014},
date = {2014-07-21},
booktitle = {2014 American Control Conference},
pages = {1643-1648},
publisher = {IEEE},
organization = {IEEE},
abstract = {In this paper an easy to implement control design strategy is proposed to achieve large range and high speed nano-positioning. The designed controllers aim to divide the positioning task between multiple large range/low speed and small range/high speed nano-positioners. Each controller assigns the proper frequency range to individual nano-positioners, and simultaneously compensates for the corresponding excited dynamics at high positioning speeds. Control design is formulated in the form of several single input-single output (SISO) system identification problems. The proposed approach removes the need for fundamental changes in the design of the conventional scanners such as piezo tubes for applications necessitating high speed and large range nano-positioning.},
keywords = {Control Theory, Experimentation, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
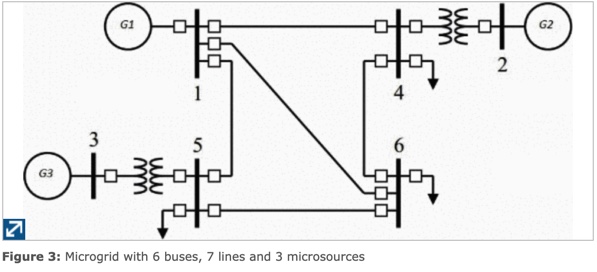
Sergio Rivera; Amro M Farid; Kamal Youcef-Toumi
A multi-agent system transient stability platform for resilient self-healing operation of multiple microgrids Proceedings Article
In: ISGT 2014, pp. 1-5, IEEE IEEE, 2014, ISBN: 978-1-4799-3653-3.
Abstract | Links | BibTeX | Tags: Computational Intelligence, intelligent systems, Modeling; Systems and Control of Smart Grids, Physical System Modeling, Simulation, Visualization
@inproceedings{MRL_SG_Multi_Agent_Micro_Grid,
title = {A multi-agent system transient stability platform for resilient self-healing operation of multiple microgrids},
author = {Sergio Rivera and Amro M Farid and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/6816377},
doi = {10.1109/ISGT.2014.6816377},
isbn = {978-1-4799-3653-3},
year = {2014},
date = {2014-05-19},
booktitle = {ISGT 2014},
pages = {1-5},
publisher = {IEEE},
organization = {IEEE},
abstract = {This paper proposes a multi-agent transient stability platform for the study of self-operation of multiple microgrids. This platform combines a MATLAB-based time domain simulation of the grid's transient stability with a JAVA-JADE (JAVA Agent DEvelopment Framework) which supports the development of multi-agent systems that utilize distributed artificial intelligence techniques that support simultaneous, geographically-distributed, and coordinated decision-making techniques. This hybrid platform leverages the numerical strengths of MATLAB with JAVA's multi-threaded decision-making capability. To that effect, the platform was tested on two complementary test cases: one to demonstrate a dynamic reconfiguration capability and another to demonstrate the decentralized dispatch of multiple microgrids. The work presents many opportunities for future developments in the domain of resilient self-healing operation of power grids.},
keywords = {Computational Intelligence, intelligent systems, Modeling; Systems and Control of Smart Grids, Physical System Modeling, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
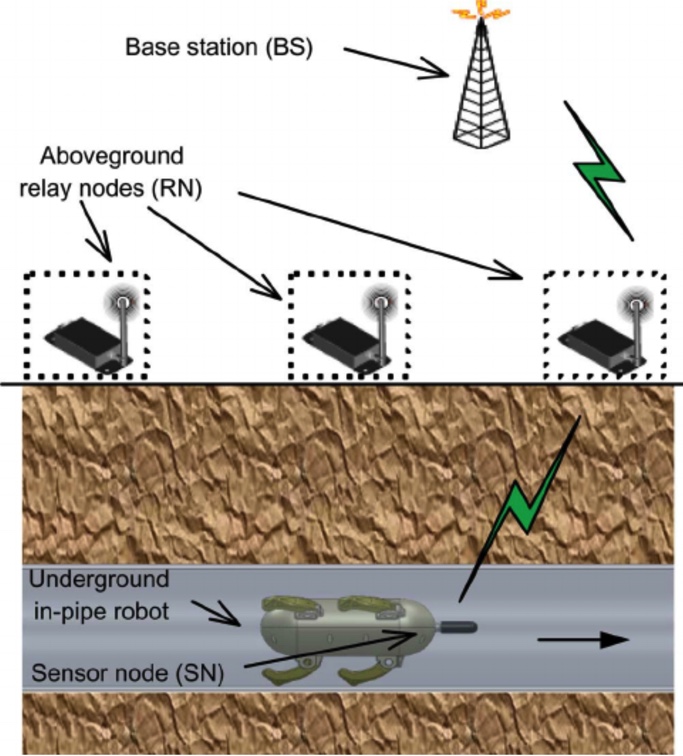
Dalei Wu; Dimitris Chatzigeorgiou; Kamal Youcef-Toumi; Samir Mekid; Rached Ben-Mansour
Channel-Aware Relay Node Placement in Wireless Sensor Networks for Pipeline Inspection Proceedings Article
In: Proceedings of the American Control Conference (2013), ACC ACC, 2014, ISSN: 1536-1276.
Abstract | Links | BibTeX | Tags: Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Node_Pipeline_Inspection,
title = {Channel-Aware Relay Node Placement in Wireless Sensor Networks for Pipeline Inspection},
author = {Dalei Wu and Dimitris Chatzigeorgiou and Kamal Youcef-Toumi and Samir Mekid and Rached Ben-Mansour},
url = {https://www.researchgate.net/publication/261282962_Channel-Aware_Relay_Node_Placement_in_Wireless_Sensor_Networks_for_Pipeline_Inspection},
doi = {10.1109/TWC.2014.2314120},
issn = {1536-1276},
year = {2014},
date = {2014-03-24},
booktitle = {Proceedings of the American Control Conference (2013)},
publisher = {ACC},
organization = {ACC},
abstract = {Wireless sensor networks (WSNs) provide an effective approach for underground pipeline inspection. Such WSNs comprise of sensor nodes (SNs) and relay nodes (RNs) for information sensing and communication. WSNs can perform accurate and realtime inspection, especially in adverse environments. However, transmitting information between underground and aboveground nodes is very challenging due to the mobility and limited energy supply of the SNs as well as complex radio propagation environment. Therefore, proper deployment of a WSN is critical to provide reliable communications and efficient inspection. This paper presents a methodology for deploying aboveground RNs in WSNs. Specifically, it provides an optimum placement of RNs along with energy use so as to allow reliable communications. This method takes into account characteristics of the wireless channels, energy consumption, pipeline coverage requirements, and SN's transmission power levels. The paper provides a path loss model for radio propagation over multiple transmission media and an algorithm for optimization of RN placement and SN's transmission power. Simulation results show the efficacy of the proposed framework.},
keywords = {Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
2013
Apoorva Santhosh; Amro M Farid; Kamal Youcef-Toumi
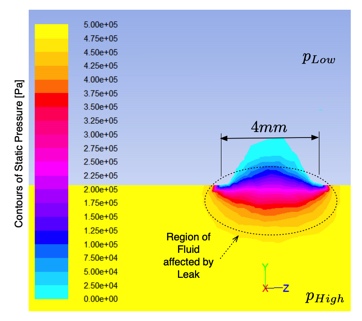
Design and Evaluation of an In-Pipe Leak Detection Sensing Technique Based on Force Transduction Proceedings Article
In: ASME 2012 International Mechanical Engineering Congress and Exposition, IEEE IEEE, 2013, ISBN: 978-0-7918-4520-2.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Force_Transduction_Leaking,
title = {Design and Evaluation of an In-Pipe Leak Detection Sensing Technique Based on Force Transduction},
author = {Apoorva Santhosh and Amro M Farid and Kamal Youcef-Toumi},
url = {https://asmedigitalcollection.asme.org/IMECE/proceedings/IMECE2012/45202/489/254570},
doi = {10.1115/IMECE2012-87493},
isbn = {978-0-7918-4520-2},
year = {2013},
date = {2013-10-08},
booktitle = {ASME 2012 International Mechanical Engineering Congress and Exposition},
publisher = {IEEE},
organization = {IEEE},
abstract = {Leakage is the major factor for unaccounted fluid losses in almost every pipe network. In most cases the deleterious effects associated with the occurrence of leaks may present serious economical and health problems and therefore, leaks must be quickly detected, located and repaired. The problem of leakage becomes even more serious when it is concerned with the vital supply of fresh water to the community. Leaking water pipelines can develop large health threats to people mostly because of the infiltration of contaminants into the water network. Such possibilities of environmental health disasters have spurred research into the development of methods for pipeline leakage detection. Most state of the art leak detection techniques have limited applicability, while some of them are not reliable enough and sometimes depend on user experience. Our goal in this work is to design and develop a reliable leak detection sensing system. The proposed technology utilizes the highly localized pressure gradient in the vicinity of a small opening due to leakage in a pressurized pipeline. In this paper we study this local phenomenon in detail and try to understand it with the help of numerical simulations in leaking pipelines (CFD studies). Finally a new system for leak detection is presented. The proposed system is designed in order to reduce the number of sensing elements required for detection. The main concept and detailed design are laid out. A prototype is fabricated and presented as a proof of concept. The prototype is tested in a simple experimental setup with artificial leakages for experimental evaluation. The sensing technique discussed in this work can be deployed in water, oil and gas pipelines without significant changes in the design, since the concepts remain the same in all cases.},
keywords = {Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
Hadi Nia; Iman Soltani; Yang Li; Lin Han; Han-Hwa Hung; Eliot Frank; Kamal Youcef-Toumi; Christine Ortiz; Alan Grodzinsky
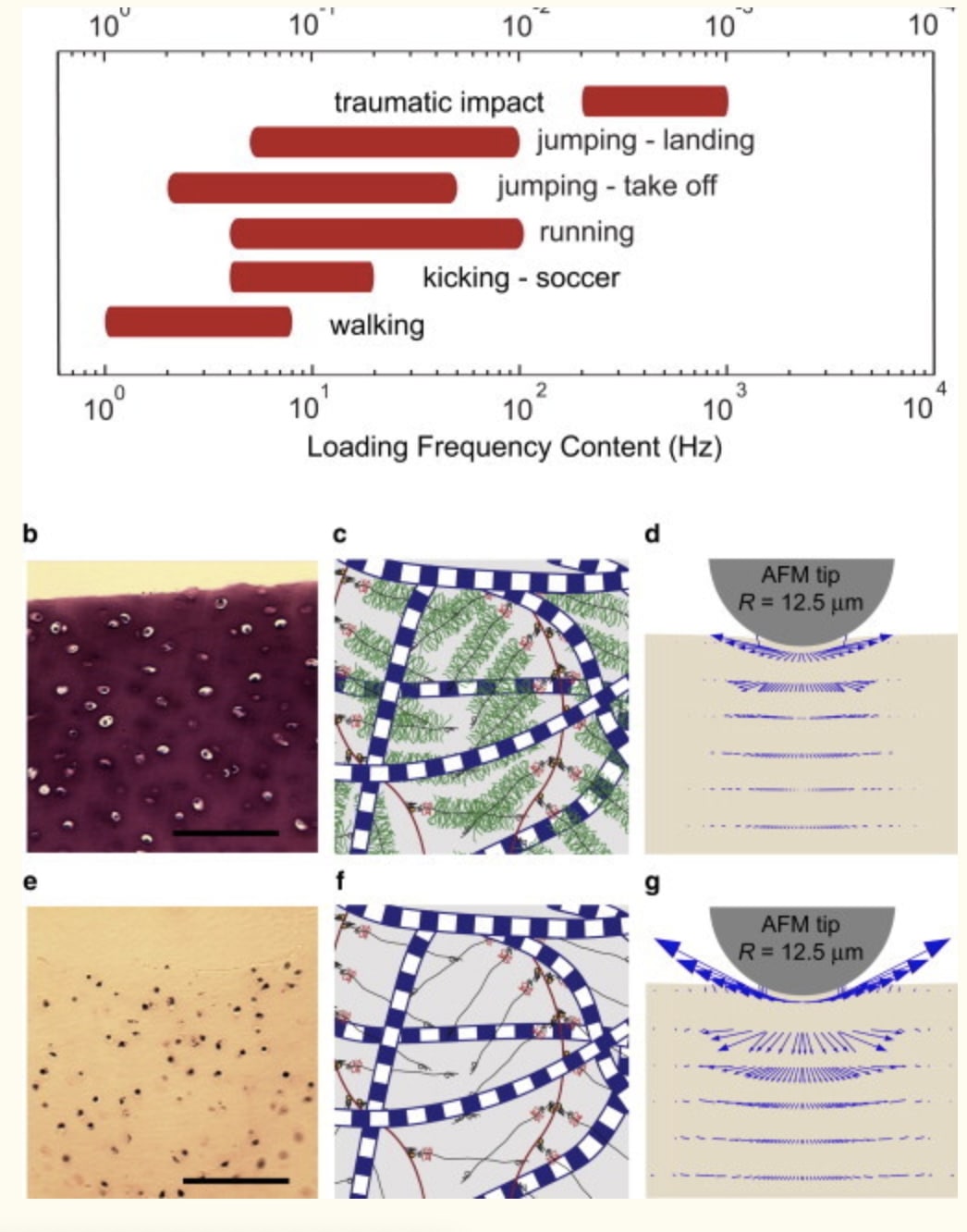
High-Bandwidth AFM-Based Rheology Reveals that Cartilage is Most Sensitive to High Loading Rates at Early Stages of Impairment Journal Article
In: Biophysical journal, vol. 104, pp. 1529-37, 2013, ISSN: 00063496.
Abstract | Links | BibTeX | Tags: Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Visualization
@article{MRL_AFM_Cartilage_Early_Impairment,
title = {High-Bandwidth AFM-Based Rheology Reveals that Cartilage is Most Sensitive to High Loading Rates at Early Stages of Impairment},
author = {Hadi Nia and Iman Soltani and Yang Li and Lin Han and Han-Hwa Hung and Eliot Frank and Kamal Youcef-Toumi and Christine Ortiz and Alan Grodzinsky},
url = {https://dspace.mit.edu/handle/1721.1/92000},
doi = {10.1016/j.bpj.2013.02.048},
issn = {00063496},
year = {2013},
date = {2013-04-02},
journal = {Biophysical journal},
volume = {104},
pages = {1529-37},
publisher = {Elsevier B.V},
abstract = {Utilizing a newly developed atomic-force-microscopy-based wide-frequency rheology system, we measured the dynamic nanomechanical behavior of normal and glycosaminoglycan (GAG)-depleted cartilage, the latter representing matrix degradation that occurs at the earliest stages of osteoarthritis. We observed unique variations in the frequency-dependent stiffness and hydraulic permeability of cartilage in the 1 Hz-to-10 kHz range, a frequency range that is relevant to joint motions from normal ambulation to high-frequency impact loading. Measurement in this frequency range is well beyond the capabilities of typical commercial atomic force microscopes. We showed that the dynamic modulus of cartilage undergoes a dramatic alteration after GAG loss, even with the collagen network still intact: whereas the magnitude of the dynamic modulus decreased two- to threefold at higher frequencies, the peak frequency of the phase angle of the modulus (representing fluid-solid frictional dissipation) increased 15-fold from 55 Hz in normal cartilage to 800 Hz after GAG depletion. These results, based on a fibril-reinforced poroelastic finite-element model, demonstrated that GAG loss caused a dramatic increase in cartilage hydraulic permeability (up to 25-fold), suggesting that early osteoarthritic cartilage is more vulnerable to higher loading rates than to the conventionally studied “loading magnitude”. Thus, over the wide frequency range of joint motion during daily activities, hydraulic permeability appears the most sensitive marker of early tissue degradation.},
keywords = {Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Visualization},
pubstate = {published},
tppubtype = {article}
}
Dimitris Chatzigeorgiou; You Wu; Kamal Youcef-Toumi; Rached Ben-Mansour
Reliable Sensing of Leaks in Pipelines Proceedings Article
In: AWWA Annual Conference and Exposition, 2014, ASME ASME, 2013, ISBN: 978-0-7918-5613-0.
Abstract | Links | BibTeX | Tags: Inspection; repair and intelligence for water distribution pipes, Physical Systems Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Reliable_Leak_Sensing,
title = {Reliable Sensing of Leaks in Pipelines},
author = {Dimitris Chatzigeorgiou and You Wu and Kamal Youcef-Toumi and Rached Ben-Mansour},
url = {https://www.academia.edu/8791279/Chatzigeorgiou_D._Wu_Y._Youcef-Toumi_K._and_Ben-Mansour_R._Reliable_Sensing_of_Leaks_in_Pipelines_ASME_Dynamic_Systems_and_Control_Conference_2013},
isbn = {978-0-7918-5613-0},
year = {2013},
date = {2013-01-01},
booktitle = {AWWA Annual Conference and Exposition, 2014},
publisher = {ASME},
organization = {ASME},
abstract = {Leakage is the major factor for unaccounted losses in every pipe network around the world (oil, gas or water). In most cases the deleterious effects associated with the occurrence of leaks may present serious economical and health problems. Therefore, leaks must be quickly detected, located and repaired. Unfortunately, most state of the art leak detection systems have limited applicability, are neither reliable nor robust, while others depend on user experience. In this work we present a new in-pipe leak detection system, PipeGuard. PipeGuard performs autonomous leak detection in pipes and, thus, eliminates the need for user experience. This paper focuses on the detection module and its main characteristics. Detection in based on the presence of a pressure gradient in the neighborhood of the leak. Moreover, the proposed detector can sense leaks at any angle around the circumference of the pipe with only two sensors. We have validated the concepts by building a prototype and evaluated its performance under real conditions in an experimental laboratory setup.},
keywords = {Inspection; repair and intelligence for water distribution pipes, Physical Systems Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
2012
Soltani I Bozchalooi; Kamal Youcef-Toumi; D J Burns; Georg E Fantner
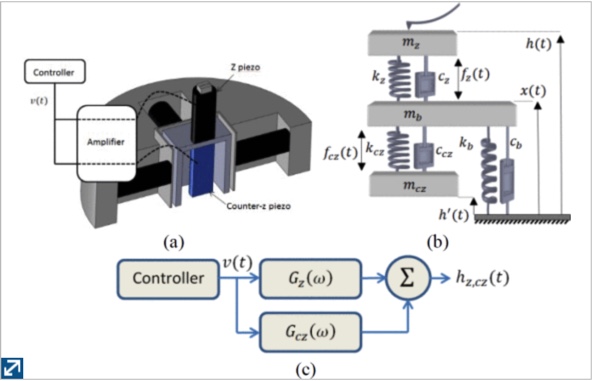
A vibration suppression approach to high-speed atomic force microscopy Proceedings Article
In: 2012 American Control Conference (ACC), pp. 3797-3802, ACC ACC, 2012, ISBN: 978-1-4577-1096-4.
Abstract | Links | BibTeX | Tags: Control Theory, Experimentation, Instrumentation, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation, Visualization
@inproceedings{MRL_AFM_Vibration_Suppression,
title = {A vibration suppression approach to high-speed atomic force microscopy},
author = {Soltani I Bozchalooi and Kamal Youcef-Toumi and D J Burns and Georg E Fantner},
url = {https://ieeexplore.ieee.org/document/6315281},
doi = {10.1109/ACC.2012.6315281},
isbn = {978-1-4577-1096-4},
year = {2012},
date = {2012-10-02},
booktitle = {2012 American Control Conference (ACC)},
pages = {3797-3802},
publisher = {ACC},
organization = {ACC},
abstract = {The possibility of many new applications and novel scientific observations can be provided by efficient and reliable high-speed atomic force microscopy techniques. However, the reliability of the AFM images decreases significantly as the imaging speed is increased to levels required for the targeted real-time observation of nano-scale phenomenon. One of the main reasons behind this limitation is the excitation of the AFM dynamics at high scan speeds. In this research we propose a piezo based, feedforward controlled, counter actuation mechanism to compensate for the excited out-of-plane scanner dynamics. For this purpose the AFM controller output is properly filtered via a linear compensator and then applied to a counter actuating piezo. The information required for compensator design is extracted from the cantilever deflection signal hence, eliminating the need for any additional sensors. The proposed approach is implemented and experimentally evaluated on the dynamic response of a custom made AFM. It is further assessed by comparing the imaging performance of the AFM with and without the application of the proposed technique and in comparison with the conventional counterbalancing methodology. The experimental results substantiate the effectiveness of the method in significantly improving the imaging performance of AFM at high scan speeds.},
keywords = {Control Theory, Experimentation, Instrumentation, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
Atia E Khalifa; Rached Ben-Mansour; Kamal Youcef-Toumi; Changrak Choi
Characterization of In-Pipe Acoustic Wave for Water Leak Detection Proceedings Article
In: ASME 2011 International Mechanical Engineering Congress and Exposition, pp. 995-1000, ACC ACC, 2012, ISBN: 978-0-7918-5494-5.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Acoustic_Wave_Pipe_Leakage,
title = {Characterization of In-Pipe Acoustic Wave for Water Leak Detection},
author = {Atia E Khalifa and Rached Ben-Mansour and Kamal Youcef-Toumi and Changrak Choi},
url = {https://asmedigitalcollection.asme.org/IMECE/proceedings/IMECE2011/54945/995/355499},
doi = {10.1115/IMECE2011-62333},
isbn = {978-0-7918-5494-5},
year = {2012},
date = {2012-08-01},
booktitle = {ASME 2011 International Mechanical Engineering Congress and Exposition},
pages = {995-1000},
publisher = {ACC},
organization = {ACC},
abstract = {This paper presents experimental observations on the characteristics of the acoustic signal propagation and attenuation inside water-filled pipes. An acoustic source (exciter) is mounted on the internal pipe wall, at a fixed location, and produces a tonal sound to simulate a leak noise with controlled frequency and amplitude, under different flow conditions. A hydrophone is aligned with the pipe centerline and can be re-positioned to capture the acoustic signal at different locations. Results showed that the wave attenuation depends on the source frequency and the line pressure. High frequency signals get attenuated more with increasing distance from the source. The optimum location to place the hydrophone for capturing the acoustic signal is not at the vicinity of source location. The optimum location also depends on the frequency and line pressure. It was also observed that the attenuation of the acoustic waves is higher in more flexible pipes like PVC ones.},
keywords = {Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
C Choi; D Chatzigeorgiou; R Ben-Mansour; K Youcef-Toumi
Design and analysis of novel friction controlling mechanism with minimal energy for in-pipe robot applications Proceedings Article
In: 2012 IEEE International Conference on Robotics and Automation, pp. 4118-4123, IEEE IEEE, 2012, ISBN: 978-1-4673-1405-3.
Abstract | Links | BibTeX | Tags: Experimentation, Fabrication, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics and Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Friction_Minimization,
title = {Design and analysis of novel friction controlling mechanism with minimal energy for in-pipe robot applications},
author = {C Choi and D Chatzigeorgiou and R Ben-Mansour and K Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/6225380},
doi = {10.1109/ICRA.2012.6225380},
isbn = {978-1-4673-1405-3},
year = {2012},
date = {2012-06-28},
booktitle = {2012 IEEE International Conference on Robotics and Automation},
pages = {4118-4123},
publisher = {IEEE},
organization = {IEEE},
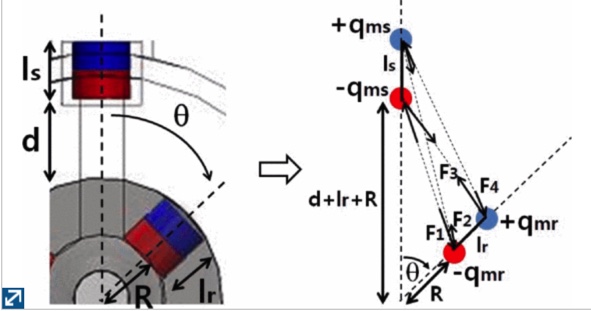
abstract = {In-pipe wheeled robots require friction on the wheels to maintain traction. Ability to vary this friction is highly desirable but conventionally used linkage mechanism is not suitable for it. This paper presents a novel mechanism generating adjustable friction with minimal energy consumption for in-pipe robots. The mechanism uses permanent magnets to achieve the objective. An appropriate model for the system is also presented and discussed. The paper identifies the important design parameters, and more importantly establishes the relation between the design parameters and the system's performance. In addition, a prototype of the mechanism was designed, fabricated and tested for validation.},
keywords = {Experimentation, Fabrication, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics and Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
Dimitris M Chatzigeorgiou; Atia E Khalifa; Kamal Youcef-Toumi; Rached Ben-Mansour
An In-Pipe Leak Detection Sensor: Sensing Capabilities and Evaluation Proceedings Article
In: ASME 2011 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, pp. 481-489, ACC ACC, 2012, ISBN: 978-0-7918-5480-8.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Leak_Capability_Sensor,
title = {An In-Pipe Leak Detection Sensor: Sensing Capabilities and Evaluation},
author = {Dimitris M Chatzigeorgiou and Atia E Khalifa and Kamal Youcef-Toumi and Rached Ben-Mansour},
url = {https://asmedigitalcollection.asme.org/IDETC-CIE/proceedings/IDETC-CIE2011/54808/481/351961},
doi = {10.1115/DETC2011-48411},
isbn = {978-0-7918-5480-8},
year = {2012},
date = {2012-06-12},
booktitle = {ASME 2011 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference},
pages = {481-489},
publisher = {ACC},
organization = {ACC},
abstract = {In most cases the deleterious effects associated with the occurrence of leak may present serious problems and therefore leaks must be quickly detected, located and repaired. The problem of leakage becomes even more serious when it is concerned with the vital supply of fresh water to the community. In addition to waste of resources, contaminants may infiltrate into the water supply. The possibility of environmental health disasters due to delay in detection of water pipeline leaks has spurred research into the development of methods for pipeline leak and contamination detection. Leaks in water pipes create acoustic emissions, which can be sensed to identify and localize leaks. Leak noise correlators and listening devices have been reported in the literature as successful approaches to leak detection but they have practical limitations in terms of cost, sensitivity, reliability and scalability. To overcome those limitations the development of an in-pipe traveling leak detection system is proposed. The development of such a system requires a clear understanding of acoustic signals generated from leaks and the study of the variation of those signals with different pipe loading conditions, leak sizes and surrounding media. This paper discusses those signals and evaluates the merits of an in-pipe-floating sensor.},
keywords = {Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
Dimitris M Chatzigeorgiou; Kamal Youcef-Toumi; Atia E Khalifa; Rached Ben-Mansour
Analysis and Design of an In-Pipe System for Water Leak Detection Proceedings Article
In: ASME 2011 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, pp. 1007-1016, ASME ASME, 2012, ISBN: 978-0-7918-5482-2.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Design_Water_Leak_Detection,
title = {Analysis and Design of an In-Pipe System for Water Leak Detection},
author = {Dimitris M Chatzigeorgiou and Kamal Youcef-Toumi and Atia E Khalifa and Rached Ben-Mansour},
url = {https://asmedigitalcollection.asme.org/IDETC-CIE/proceedings/IDETC-CIE2011/54822/1007/353866},
doi = {10.1115/DETC2011-48395},
isbn = {978-0-7918-5482-2},
year = {2012},
date = {2012-06-12},
booktitle = {ASME 2011 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference},
pages = {1007-1016},
publisher = {ASME},
organization = {ASME},
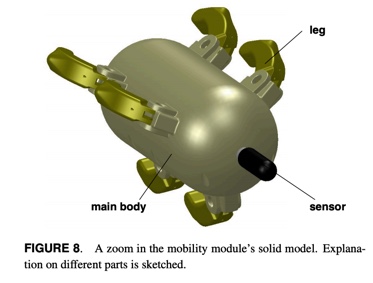
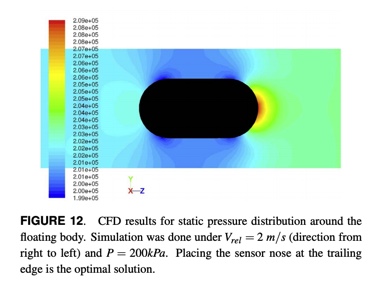
abstract = {In most cases the deleterious effects associated with the occurrence of leaks may present serious problems and therefore, leaks must be quickly detected, located and repaired. The problem of leakage becomes even more serious when it is concerned with the vital supply of fresh water to the community. In addition to waste of resources, contaminants may infiltrate into the water supply. The possibility of environmental health disasters due to delay in detection of water pipeline leaks has spurred research into the development of methods for pipeline leak and contamination detection. Leaking in water networks has been a very significant problem worldwide, especially in developing countries, where water is sparse. Many different techniques have been developed to detect leaks, either from the inside or from the outside of the pipe; each one of them with their advantages, complexities but also limitations. To overcome those limitations we focus our work on the development of an in-pipe-floating sensor. The present paper discusses the design considerations of a novel autonomous system for in-pipe water leak detection. The system is carefully designed to be minimally invasive to the flow within the pipe and thus not to affect the delicate leak signal. One of its characteristics is the controllable motion inside the pipe. The system is capable of pinpointing leaks in pipes while operating in real network conditions, i.e. pressurized pipes and high water flow rates, which are major challenges.},
keywords = {Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
2010
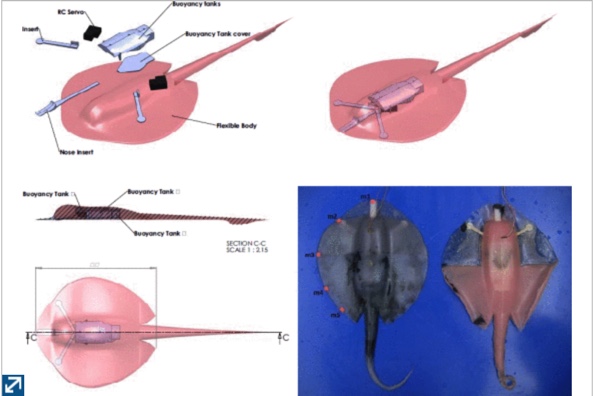
Pablo Valdivia y Alvarado; Stephanie Chin; Winston Larson; Anirban Mazumdar; Kamal Youcef-Toumi
A soft body under-actuated approach to multi degree of freedom biomimetic robots: A stingray example Proceedings Article
In: 2010 3rd IEEE RAS EMBS International Conference on Biomedical Robotics and Biomechatronics, pp. 473-478, IEEE IEEE, 2010, ISBN: 978-1-4244-7709-8.
Abstract | Links | BibTeX | Tags: Biomimetic robotic fish for underwater monitoring, Experimentation, Mechatronic Design, Physical System Modeling, Robotics and Automation, Simulation, Visualization
@inproceedings{MRL_BRF_Multi_DOF_Stingray,
title = {A soft body under-actuated approach to multi degree of freedom biomimetic robots: A stingray example},
author = {Pablo Valdivia y Alvarado and Stephanie Chin and Winston Larson and Anirban Mazumdar and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/5627803},
doi = {10.1109/BIOROB.2010.5627803},
isbn = {978-1-4244-7709-8},
year = {2010},
date = {2010-11-11},
booktitle = {2010 3rd IEEE RAS EMBS International Conference on Biomedical Robotics and Biomechatronics},
pages = {473-478},
publisher = {IEEE},
organization = {IEEE},
abstract = {In this paper we present a new application of the methodology our group is developing to design and prototype under-actuated biomimetic robots by determining appropriate body material property distributions. When excited, flexible bodies with proper anisotropic material distributions display modes of vibration that mimic required locomotion kinematics and require minimal actuation. Our previous prototypes explored simple two dimensional applications for fish-like swimming. In this paper, the three dimensional vibrational kinematics of a stingray are explored. A simple design is explained, and corresponding prototypes are presented along with preliminary performance data. Our methodology shows great promise to develop simple, robust, and inexpensive mobile robots that can efficiently accomplish locomotion.},
keywords = {Biomimetic robotic fish for underwater monitoring, Experimentation, Mechatronic Design, Physical System Modeling, Robotics and Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
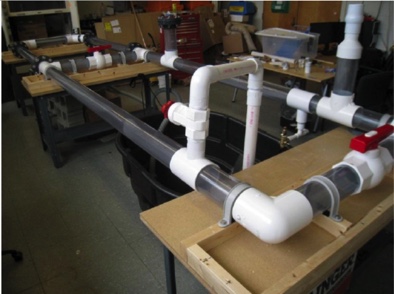
Dimitris M Chatzigeorgiou; Sumeet Kumar; Atia E Khalifa; Ajay Deshpande; Kamal Youcef-Toumi; Sanjay Sarma; Rached Ben-Mansour
In-pipe Acoustic Characterization of Leak Signals in Plastic Water-filled Pipes Proceedings Article
In: AWWA Annual Conference and Exposition (ACE) 2010, AWWA AWWA, 2010.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Acoustic_Leak_Signals,
title = {In-pipe Acoustic Characterization of Leak Signals in Plastic Water-filled Pipes},
author = {Dimitris M Chatzigeorgiou and Sumeet Kumar and Atia E Khalifa and Ajay Deshpande and Kamal Youcef-Toumi and Sanjay Sarma and Rached Ben-Mansour},
url = {https://www.researchgate.net/publication/277303127_In-pipe_Acoustic_Characterization_of_Leak_Signals_in_Plastic_Water-filled_Pipes},
year = {2010},
date = {2010-01-01},
booktitle = {AWWA Annual Conference and Exposition (ACE) 2010},
publisher = {AWWA},
organization = {AWWA},
abstract = {Acoustic emissions can be sensed to identify and localize leaks in water pipes. Leak noise correlators and listening devices have been reported in literature as successful approaches to leak detection but they have practical limitations in terms of cost, sensitivity, reliability and scalability. A possible efficient solution is the development of an in-pipe traveling leak detection system. It has been reported that in-pipe sensing is more accurate and efficient since the sensing element can be very close to the sound source. Currently in-pipe approaches are limited to large leaks and larger diameter pipes. Development of such a system requires clear understanding of acoustic signals generated from leaks and their variation with different pipe loading conditions, leak sizes and surrounding media. This paper discusses the acoustic characterization of leak signals in controlled environments. A lab experimental setup was designed and built in which measurements were taken from inside 4 inch PVC water pipes using a hydrophone. Signals were collected for a wide range of conditions: different pressures and leak flow rates to better understand the leak signal signatures. Experiments were conducted with different pipe connecting elements like valves and junctions, and different external conditions such as pipes placed in water, air and soil. Signals were collected at various distances from the leak location (upstream and downstream) to understand the opportunities of spatial cross-correlation techniques in localizing leaks and the effect of sensor position on the signal. Characterizations of different datasets are presented in frequency domain. The implications of acoustic characterization on the design of algorithms for leak detection are discussed and a simple algorithm to decide whether or not a leak is present near the sensor location is proposed, based on signal power calculations. The characterization gives insights, which will pave ways for the development of smart, autonomous pipe-traversing systems capable of detecting and localizing leaks on a city level water distribution network.},
keywords = {Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
0000
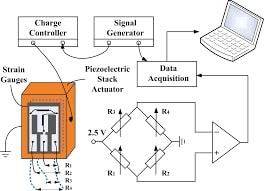
C Yang; C Li; F Xia; Y Zhu; J Zhao; K Youcef-Toumi
Charge Controller With Decoupled and Self-Compensating Configurations for Linear Operation of Piezoelectric Actuators in a Wide Bandwidth Journal Article
In: IEEE Transactions on Industrial Electronics, vol. 66, no. 7, pp. 5392-5402, 0000, ISSN: 1557-9948.
Abstract | Links | BibTeX | Tags: Control Theory, Instrumentation, Nanotechnology, Physical System Modeling, Robot operated modular fixtures, Visualization
@article{MRL_AFM_Charge_Controller_Compensating_Configs,
title = {Charge Controller With Decoupled and Self-Compensating Configurations for Linear Operation of Piezoelectric Actuators in a Wide Bandwidth},
author = {C Yang and C Li and F Xia and Y Zhu and J Zhao and K Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/8466119},
doi = {10.1109/TIE.2018.2868321},
issn = {1557-9948},
journal = {IEEE Transactions on Industrial Electronics},
volume = {66},
number = {7},
pages = {5392-5402},
abstract = {Charge control is a well-known sensorless approach to operate piezoelectric actuators, which has been proposed for more than 30 years. However, it is rarely used in industry because the implemented controllers suffer from the issues of limited low-frequency performance, long settling time, floating-load, and loss of stroke, etc. In this paper, a novel controller circuit dedicated to overcome these issues is presented. In the proposed scheme, a grounded-load charge controller with decoupled configuration is developed, which separates high-frequency and low-frequency paths, thus achieving arbitrarily low transition frequency without increasing the settling time. Based on this, a self-compensating configuration is further proposed and integrated into the controller circuit, which makes full use of controller output to improve its own control performance at low frequencies. Experimental results show that the presented charge controller can effectively reduce more than 88% of the hysteretic nonlinearity even when operating close to the transition frequency. To demonstrate its practical value, we then integrate it into a custom-designed high-speed atomic force microscope system. By comparing images obtained from using voltage drive and charge controller, it is clear that the piezoelectric hysteresis has been significantly reduced in a wide bandwidth.},
keywords = {Control Theory, Instrumentation, Nanotechnology, Physical System Modeling, Robot operated modular fixtures, Visualization},
pubstate = {published},
tppubtype = {article}
}