
Mechatronics Research Lab Publications
List still being populated due to webpage maintenance
2020
L Yang; I Paranawithana; K Youcef-Toumi; U Tan
Confidence-Based Hybrid Tracking to Overcome Visual Tracking Failures in Calibration-Less Vision-Guided Micromanipulation Journal Article
In: IEEE Transactions on Automation Science and Engineering, vol. 17, no. 1, pp. 524-536, 2020, ISSN: 1558-3783.
Abstract | Links | BibTeX | Tags: Algorithms, Mechatronic Design, Nanotechnology, Physical System Modeling, Robotics & Automation
@article{MRL_AFM_Confidence_Based_Hybrid_Tracking,
title = {Confidence-Based Hybrid Tracking to Overcome Visual Tracking Failures in Calibration-Less Vision-Guided Micromanipulation},
author = {L Yang and I Paranawithana and K Youcef-Toumi and U Tan},
doi = {10.1109/TASE.2019.2932724},
issn = {1558-3783},
year = {2020},
date = {2020-01-01},
journal = {IEEE Transactions on Automation Science and Engineering},
volume = {17},
number = {1},
pages = {524-536},
publisher = {IEEE},
abstract = {This article proposes a confidence-based approach for combining two visual tracking techniques to minimize the influence of unforeseen visual tracking failures to achieve uninterrupted vision-based control. Despite research efforts in vision-guided micromanipulation, existing systems are not designed to overcome visual tracking failures, such as inconsistent illumination condition, regional occlusion, unknown structures, and nonhomogenous background scene. There remains a gap in expanding current procedures beyond the laboratory environment for practical deployment of vision-guided micromanipulation system. A hybrid tracking method, which combines motion-cue feature detection and score-based template matching, is incorporated in an uncalibrated vision-guided workflow capable of self-initializing and recovery during the micromanipulation. Weighted average, based on the respective confidence indices of the motion-cue feature localization and template-based trackers, is inferred from the statistical accuracy of feature locations and the similarity score-based template matches. Results suggest improvement of the tracking performance using hybrid tracking under the conditions. The mean errors of hybrid tracking are maintained at subpixel level under adverse experimental conditions while the original template matching approach has mean errors of 1.53, 1.73, and 2.08 pixels. The method is also demonstrated to be robust in the nonhomogeneous scene with an array of plant cells. By proposing a self-contained fusion method that overcomes unforeseen visual tracking failures using pure vision approach, we demonstrated the robustness in our developed low-cost micromanipulation platform.},
keywords = {Algorithms, Mechatronic Design, Nanotechnology, Physical System Modeling, Robotics & Automation},
pubstate = {published},
tppubtype = {article}
}
2019
You Wu; Elizabeth Mittmann; Crystal Winston; Kamal Youcef-Toumi
A Practical Minimalism Approach to In-pipe Robot Localization Proceedings Article
In: 2019 American Control Conference (ACC), pp. 3180-3187, IEEE IEEE, 2019, ISBN: 978-1-5386-7926-5.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Pipe_Robot_Localization,
title = {A Practical Minimalism Approach to In-pipe Robot Localization},
author = {You Wu and Elizabeth Mittmann and Crystal Winston and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/8814648},
doi = {10.23919/ACC.2019.8814648},
isbn = {978-1-5386-7926-5},
year = {2019},
date = {2019-08-19},
booktitle = {2019 American Control Conference (ACC)},
pages = {3180-3187},
publisher = {IEEE},
organization = {IEEE},
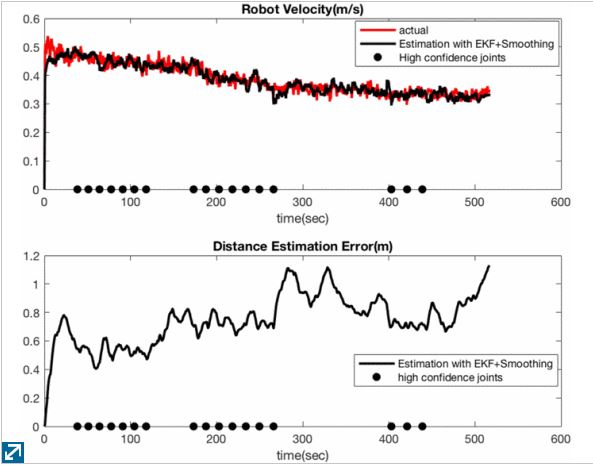
abstract = {Water pipe leakage is a common and significant problem around the world. In recent years, an increasing amount of effort has been put into developing effective leak detection solutions for water pipes. Among them, the pressure gradient based method developed at the Massachusetts Institute of Technology excels for its sensitivity in low pressure, small diameter pipes. It can also work in both plastic and metallic pipes. However, in order for leaks detected to be fixed, one must also know the locations of the leaks. In addition, sensing the robot's location via GPS or remote sensors requires greater power and relies on certain ground properties. Thus this paper sets out to localize the robot using only the on board sensors which are an IMU, gyro, and the leak sensors. Through pipe joint measurement and the extended Kalman filter simulations show the tracking error is about 0.5% of the total distance of the robotic inspection. With a minimal number of additional leak sensors added, a complementary method was developed to function in more heavily tuberculated pipes.},
keywords = {Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
C Yang; F Xia; Y Wang; S Truncale; K Youcef-Toumi
Design and Control of a Multi-Actuated Nanopositioning Stage with Stacked Structure Proceedings Article
In: 2019 American Control Conference (ACC), pp. 3782-3788, IEEE, 2019, ISSN: 2378-5861.
Abstract | Links | BibTeX | Tags: Control Theory, Direct-drive robots for laser cutting manufacturing, Fabrication, Instrumentation, Mechatronic Design, Robotics & Automation
@inproceedings{MRL_AFM_Nanopositioning_Stage_Stacked,
title = {Design and Control of a Multi-Actuated Nanopositioning Stage with Stacked Structure},
author = {C Yang and F Xia and Y Wang and S Truncale and K Youcef-Toumi},
doi = {10.23919/ACC.2019.8815299},
issn = {2378-5861},
year = {2019},
date = {2019-07-12},
booktitle = {2019 American Control Conference (ACC)},
journal = {xplore},
pages = {3782-3788},
publisher = {IEEE},
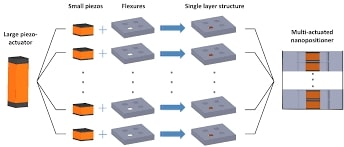
abstract = {A novel multi-actuated nanopositioning stage with stacked structure has been developed. The aim is to achieve both high bandwidth and large motion range. Symmetric flexures are designed to obtain equal stiffness along any direction in the lateral plane. With this design, the lateral stiffness and corresponding bending mode resonance frequency can be optimized. Both analytical model and finite element analysis are employed to predict the dominant resonance frequency. Experimental results indicate that the dominant resonance of nanopositioner is at 28.2 kHz, with a motion range of 16.5J.1m. A disturbance-observer-based controller is implemented to suppress the hysteretic nonlinearity. The new design and control system enable high-bandwidth and high-precision nanopositioning up to 2 kHz.},
keywords = {Control Theory, Direct-drive robots for laser cutting manufacturing, Fabrication, Instrumentation, Mechatronic Design, Robotics & Automation},
pubstate = {published},
tppubtype = {inproceedings}
}
Ali Jahanian; Quang H Le; Kamal Youcef-Toumi; Dzmitry Tsetserukou
See the E-Waste! Training Visual Intelligence to See Dense Circuit Boards for Recycling Proceedings Article
In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, 2019.
Abstract | Links | BibTeX | Tags: Algorithms, Automated cellphone recycling, Computational Intelligence, Experimentation, Mechatronic Design, Robotics & Automation, Visualization
@inproceedings{MRL_AFM_Training_CB_Recycling,
title = {See the E-Waste! Training Visual Intelligence to See Dense Circuit Boards for Recycling},
author = {Ali Jahanian and Quang H Le and Kamal Youcef-Toumi and Dzmitry Tsetserukou},
url = {https://openaccess.thecvf.com/content_CVPRW_2019/html/cv4gc/Jahanian_See_the_E-Waste_Training_Visual_Intelligence_to_See_Dense_Circuit_CVPRW_2019_paper.html},
year = {2019},
date = {2019-06-01},
booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops},
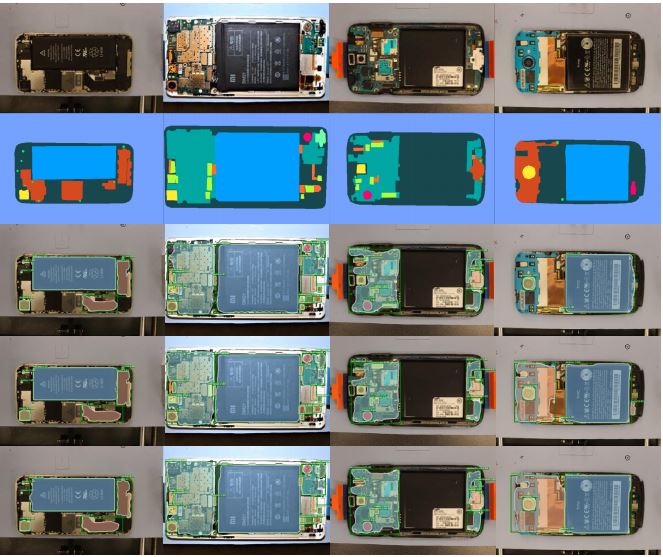
abstract = {The state-of-the-art semantic segmentation and object detection deep learning models are taking the leap to generalize and leverage automation, but have yet to be useful in real-world tasks such as those in dense circuit board robotic manipulation. Consider a cellphone circuit board that because of small components and a couple of hundred microns gaps between them challenges any manipulation task. For effective automation and robotics usage in manufacturing, we tackle this problem by building a convolutional neural networks optimized for multi-task learning of instance semantic segmentation and detection while accounting for crisp boundaries of small components inside dense boards. We explore the feature learning mechanism, and add the auxiliary task of boundary detection to encourage the network to learn the objects' geometric properties along with the other objectives. We examine the performance of the networks in the visual tasks (separately and all together), and the extent of generalization on the recycling phone dataset. Our network outperformed the state-of-the-art in the visual tasks while maintaining the high speed of computation. To facilitate this globally concerning topic, we provide a benchmark for Ewaste visual tasks research, and publicize our collected dataset and code, as well as demos on our in-lab robot at https://github.com/MIT-MRL/recybot. pubstate = published},
keywords = {Algorithms, Automated cellphone recycling, Computational Intelligence, Experimentation, Mechatronic Design, Robotics & Automation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
2017
L Yang; I Paranawithana; K Youcef-Toumi; U Tan
Automatic Vision-Guided Micromanipulation for Versatile Deployment and Portable Setup Journal Article
In: IEEE Transactions on Automation Science and Engineering, vol. 15, no. 4, pp. 1609-1620, 2017, ISSN: 1558-3783.
Abstract | Links | BibTeX | Tags: Control Theory, Mechatronic Design, Physical System Modeling, Robot operated modular fixtures, Robotics & Automation
@article{MRL_AFM_Automatic_Micromanipulation,
title = {Automatic Vision-Guided Micromanipulation for Versatile Deployment and Portable Setup},
author = {L Yang and I Paranawithana and K Youcef-Toumi and U Tan},
doi = {10.1109/TASE.2017.2754517},
issn = {1558-3783},
year = {2017},
date = {2017-10-23},
journal = {IEEE Transactions on Automation Science and Engineering},
volume = {15},
number = {4},
pages = {1609-1620},
publisher = {IEEE},
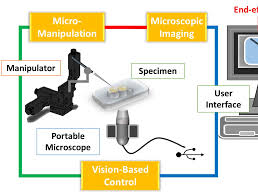
abstract = {In this paper, an automatic vision-guided micromanipulation approach to facilitate versatile deployment and portable setup is proposed. This paper is motivated by the importance of micromanipulation and the limitations in existing automation technology in micromanipulation. Despite significant advancements in micromanipulation techniques, there remain bottlenecks in integrating and adopting automation for this application. An underlying reason for the gaps is the difficulty in deploying and setting up such systems. To address this, we identified two important design requirements, namely, portability and versatility of the micromanipulation platform. A self-contained vision-guided approach requiring no complicated preparation or setup is proposed. This is achieved through an uncalibrated self-initializing workflow algorithm also capable of assisted targeting. The feasibility of the solution is demonstrated on a low-cost portable microscope camera and compact actuated microstages. Results suggest subpixel accuracy in localizing the tool tip during initialization steps. The self-focus mechanism could recover intentional blurring of the tip by autonomously manipulating it 95.3% closer to the focal plane. The average error in visual servo is less than a pixel with our depth compensation mechanism showing better maintaining of similarity score in tracking. Cell detection rate in a 1637-frame video stream is 97.7% with subpixels localization uncertainty. Our work addresses the gaps in existing automation technology in the application of robotic vision-guided micromanipulation and potentially contributes to the way cell manipulation is performed.},
keywords = {Control Theory, Mechatronic Design, Physical System Modeling, Robot operated modular fixtures, Robotics & Automation},
pubstate = {published},
tppubtype = {article}
}
2016
Taha Elmokadem; Mohamed Zribi; Kamal Youcef-Toumi
Terminal sliding mode control for the trajectory tracking of underactuated Autonomous Underwater Vehicles Journal Article
In: Ocean Engineering, vol. 129, pp. 613-625, 2016, ISSN: 0029-8018.
Abstract | Links | BibTeX | Tags: Computer vision for autonomous vehicle sensing, Instrumentation, Mechatronic Design, Physical System Modeling, Robotics & Automation
@article{MRL_AFM_Terminal_Trajectory_Tracking,
title = {Terminal sliding mode control for the trajectory tracking of underactuated Autonomous Underwater Vehicles},
author = {Taha Elmokadem and Mohamed Zribi and Kamal Youcef-Toumi},
url = {https://www.sciencedirect.com/science/article/pii/S0029801816304759},
doi = {https://doi.org/10.1016/j.oceaneng.2016.10.032},
issn = {0029-8018},
year = {2016},
date = {2016-11-06},
journal = {Ocean Engineering},
volume = {129},
pages = {613-625},
publisher = {elsevier},
abstract = {The aim of this paper is to develop robust control schemes for the lateral motion of underactuated autonomous underwater vehicles (AUVs). The AUV complex dynamics makes their control a challenging task. These challenges include the AUV nonlinear dynamics, unmodeled dynamics, system uncertainties and environmental disturbances. The objective of the proposed control schemes is to solve the trajectory tracking problem of AUVs. These controllers are designed using the concepts of terminal sliding mode control. The control performance of an example AUV (the REMUS AUV), using the proposed control schemes, is evaluated through computer simulations. The simulation results show that the proposed control schemes work well. Moreover, simulation studies are given to evaluate the performance of the proposed control schemes when bounded disturbances are acting on the vehicle. These studies indicate that the proposed control schemes are robust under bounded disturbances.},
keywords = {Computer vision for autonomous vehicle sensing, Instrumentation, Mechatronic Design, Physical System Modeling, Robotics & Automation},
pubstate = {published},
tppubtype = {article}
}
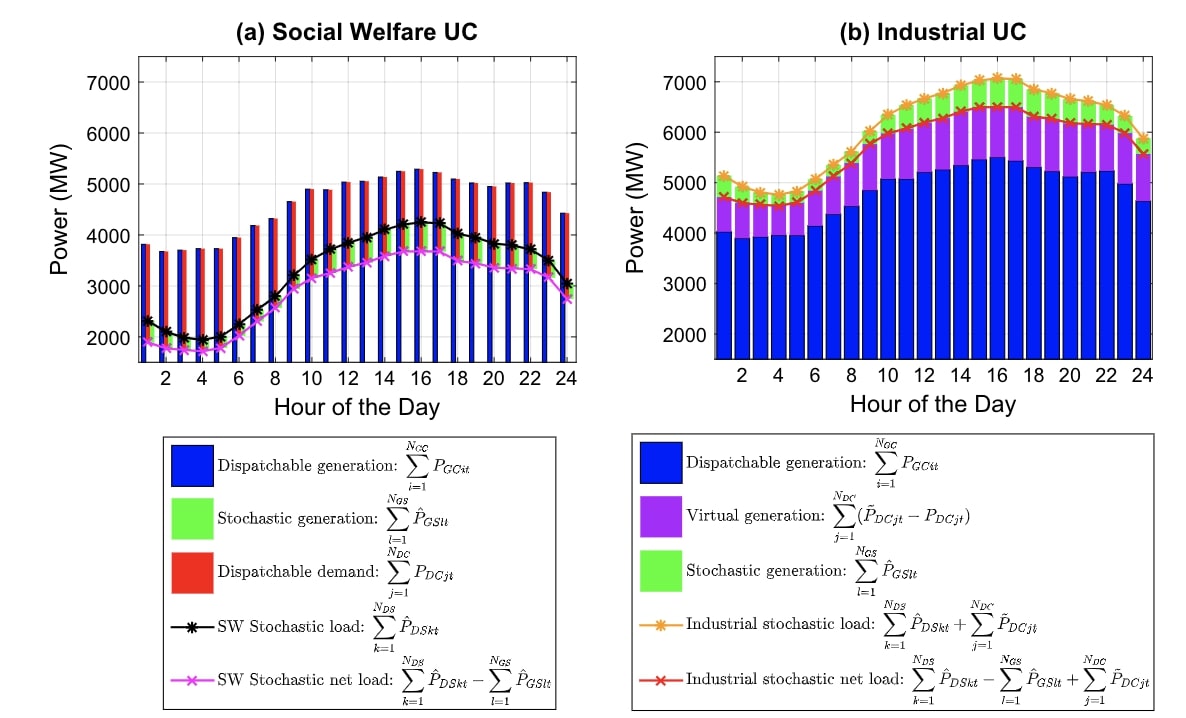
Bo Jiang; Aramazd Muzhikyan; Amro M Farid; Kamal Youcef-Toumi
Demand side management in power grid enterprise control: A comparison of industrial & social welfare approaches Journal Article
In: Applied Energy, vol. 187, pp. 833-846, 2016, ISSN: 0306-2619.
Abstract | Links | BibTeX | Tags: Algorithms, Control Theory, Experimentation, Robot operated modular fixtures, Robotics & Automation, Simulation
@article{MRL_AFM_Comparison_Industrial_Social_Welfare,
title = {Demand side management in power grid enterprise control: A comparison of industrial & social welfare approaches},
author = {Bo Jiang and Aramazd Muzhikyan and Amro M Farid and Kamal Youcef-Toumi},
url = {https://www.sciencedirect.com/science/article/pii/S0306261916315410},
doi = {https://doi.org/10.1016/j.apenergy.2016.10.096},
issn = {0306-2619},
year = {2016},
date = {2016-10-25},
journal = {Applied Energy},
volume = {187},
pages = {833-846},
publisher = {ScienceDirect},
abstract = {Despite the recognized importance of demand side management (DSM) for mitigating the impact of variable energy resources and reducing the system costs, the academic and industrial literature have taken divergent approaches to DSM implementation. The prequel to this paper has demonstrated that the netload baseline inflation – a feature particular to the industrial DSM unit commitment formulation – leads to higher and costlier day-ahead scheduling compared to the academic social welfare method. This paper now expands this analysis from a single optimization problem to the full power grid enterprise control with its multiple control layers at their associated time scales. These include unit commitment, economic dispatch and regulation services. It compares the two DSM formulations and quantifies the technical and economic impacts of industrial baseline errors in the day-ahead and real-time markets. The paper concludes that the presence of baseline errors – present only in the industrial model – leads to a cascade of additional system imbalances and costs as compared to the social welfare model. A baseline error introduced in the unit commitment problem will increase costs not just in the day-ahead market, but will also introduce a greater netload error residual in the real-time market causing additional cost and imbalances. These imbalances if left unmitigated degrade system reliability or otherwise require costly regulating reserves to achieve the same performance. An additional baseline error introduced in the economic dispatch further compounds this cascading effect with additional costs in the real-time market, amplified downstream imbalances, and further regulation capacity for its mitigation.},
keywords = {Algorithms, Control Theory, Experimentation, Robot operated modular fixtures, Robotics & Automation, Simulation},
pubstate = {published},
tppubtype = {article}
}
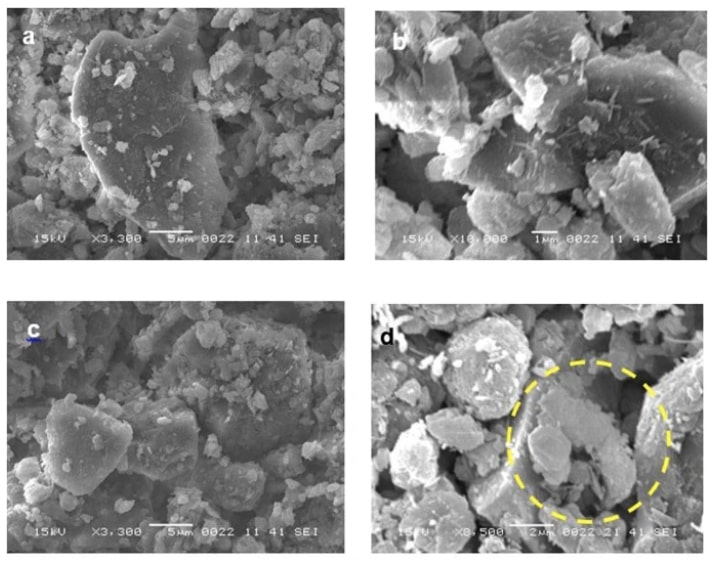
Bekir Yilbas; Haider Ali; Naseer Al-Aqeeli; Mazen Khaled; Syed Said; Abu Dheir N; Necar Merah; Kamal Youcef-Toumi; Kripa Varanasi
Characterization of Environmental Dust in the Dammam Area and Mud After-Effects on Bisphenol-A Polycarbonate Sheets Journal Article
In: Scientific Reports, vol. 6, pp. 24308, 2016, ISSN: 24308.
Abstract | Links | BibTeX | Tags: Data-driven learning for intelligent machine maintenance, Mechatronic Design, Physical System Modeling, Robotics & Automation, Simulation, Visualization
@article{MRL_AFM_Environmental_Dust,
title = {Characterization of Environmental Dust in the Dammam Area and Mud After-Effects on Bisphenol-A Polycarbonate Sheets},
author = {Bekir Yilbas and Haider Ali and Naseer Al-Aqeeli and Mazen Khaled and Syed Said and Abu Dheir N and Necar Merah and Kamal Youcef-Toumi and Kripa Varanasi},
doi = {10.1038/srep24308},
issn = {24308},
year = {2016},
date = {2016-04-16},
journal = {Scientific Reports},
volume = {6},
pages = {24308},
publisher = {Nature},
abstract = {Owing to recent climate changes, dust storms are increasingly common, particularly in the Middle East region. Dust accumulation and subsequent mud formation on solid surfaces in humid environments typically have adverse effects on surface properties such as optical transmittance, surface texture and microhardness. This is usually because the mud, which contains alkaline and ionic species, adheres strongly to the surface, often through chemical bonds and is therefore difficult to remove. In this study, environmental dust and the after-effects of mud formed on a polycarbonate sheet, which is commonly used as a protective glass in photovoltaic cells. Ionic compounds (OH−) are shown to significantly affect the optical, mechanical and textural characteristics of the polycarbonate surface and to increase the adhesion work required to remove the dry mud from the polycarbonate surface upon drying. Such ability to modify characteristics of the polycarbonate surface could address the dust/mud-related limitations of superhydrophobic surfaces.},
keywords = {Data-driven learning for intelligent machine maintenance, Mechatronic Design, Physical System Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {article}
}
2014

Dimitris Chatzigeorgiou; You Wu; Kamal Youcef-Toumi; Rached Ben-Mansour
MIT Leak Detector: An in-pipe leak detection robot Proceedings Article
In: 2014 IEEE International Conference on Robotics and Automation (ICRA), pp. 2091-2091, IEEE IEEE, 2014, ISBN: 978-1-4799-3685-4.
Abstract | Links | BibTeX | Tags: Inspection; repair and intelligence for water distribution pipes, Physical Systems Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Leak_Detecting_Robot,
title = {MIT Leak Detector: An in-pipe leak detection robot},
author = {Dimitris Chatzigeorgiou and You Wu and Kamal Youcef-Toumi and Rached Ben-Mansour},
url = {https://ieeexplore.ieee.org/document/6907144},
doi = {10.1109/ICRA.2014.6907144},
isbn = {978-1-4799-3685-4},
year = {2014},
date = {2014-09-24},
booktitle = {2014 IEEE International Conference on Robotics and Automation (ICRA)},
pages = {2091-2091},
publisher = {IEEE},
organization = {IEEE},
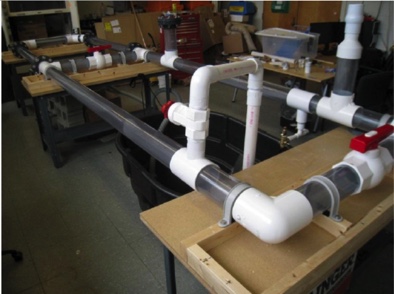
abstract = {In this work we present a new in-pipe leak detection robot, the MIT Leak Detector. The system performs autonomous leak detection in gas pipes in a reliable and robust fashion. Detection in based on the presence of a pressure gradient in the neighborhood of the leak. As the MIT Leak Detector travels through pipes, it picks up the pressure gradient in case of leaks via a carefully designed detector. In this work we demonstrate the performance of the system in a lab setup, which consists of 100mm ID pipes containing pressurized air.},
keywords = {Inspection; repair and intelligence for water distribution pipes, Physical Systems Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
Dimitris Chatzigeorgiou; Kamal Youcef-Toumi; Rached Ben-Mansour
Modeling and analysis of an in-pipe robotic leak detector Proceedings Article
In: 2014 IEEE International Conference on Robotics and Automation (ICRA), pp. 3351-3357, IEEE, 2014, ISBN: 978-1-4799-3685-4.
Abstract | Links | BibTeX | Tags: Inspection; repair and intelligence for water distribution pipes, Physical Systems Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Analysis_Leak_Detection,
title = {Modeling and analysis of an in-pipe robotic leak detector},
author = {Dimitris Chatzigeorgiou and Kamal Youcef-Toumi and Rached Ben-Mansour},
url = {https://ieeexplore.ieee.org/abstract/document/6907341},
doi = {10.1109/ICRA.2014.6907341},
isbn = {978-1-4799-3685-4},
year = {2014},
date = {2014-09-24},
booktitle = {2014 IEEE International Conference on Robotics and Automation (ICRA)},
pages = {3351-3357},
publisher = {IEEE},
abstract = {Leakage is the most important factor for unaccounted losses in any pipe network around the world. Most state of the art leak detection systems have limited applicability, lack in reliability and depend on user experience for data extraction. This paper is about a novel system for robotic pipe integrity inspection. Unlike existing systems, detection in based on the presence of a pressure gradient in the neighborhood of a leak. This phenomenon is translated into force measurements via a specially designed and instrumented mechanical embodiment (detector). In this paper an analytic dynamic model of the robotic detector is derived and studied. A prototype is built and the main concepts are validated via experiments.},
keywords = {Inspection; repair and intelligence for water distribution pipes, Physical Systems Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
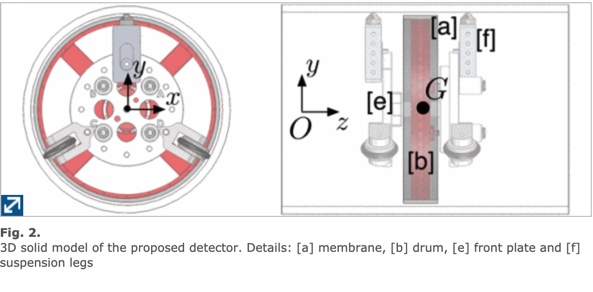
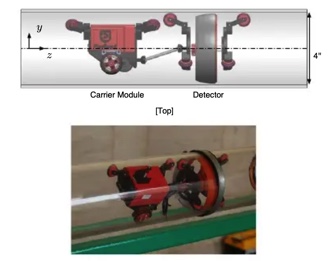
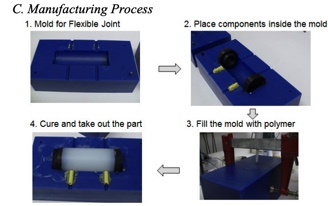
D Chatzigeorgiou; K Youcef-Toumi; R Ben-Mansour
Design of a Novel In-Pipe Reliable Leak Detector Journal Article
In: IEEE/ASME Transactions on Mechatronics, vol. 20, no. 2, pp. 824-833, 2014, ISSN: 1941-014X.
Abstract | Links | BibTeX | Tags: Control Theory, Experimentation, Inspection, Physical System Modeling, repair & intelligence for water distribution pipes, Robotics & Automation
@article{MRL_AFM_Leak_Detector,
title = {Design of a Novel In-Pipe Reliable Leak Detector},
author = {D Chatzigeorgiou and K Youcef-Toumi and R Ben-Mansour},
url = {https://ieeexplore.ieee.org/document/6778062?arnumber=6778062},
doi = {10.1109/TMECH.2014.2308145},
issn = {1941-014X},
year = {2014},
date = {2014-03-25},
journal = {IEEE/ASME Transactions on Mechatronics},
volume = {20},
number = {2},
pages = {824-833},
publisher = {IEEE},
abstract = {Leakage is the major factor for unaccounted losses in every pipe network around the world (oil, gas, or water). In most cases, the deleterious effects associated with the occurrence of leaks may present serious economical and health problems. Therefore, leaks must be quickly detected, located, and repaired. Unfortunately, most state-of-the-art leak detection systems have limited applicability, are neither reliable nor robust, while others depend on the user experience. In this paper, we present a new in-pipe leak detection system. It performs autonomous leak detection in pipes and, thus, eliminates the need for the user experience. This paper focuses on the detection module and its main characteristics. Detection in based on the presence of a pressure gradient in the neighborhood of the leak. Moreover, the proposed detector can sense leaks at any angle around the circumference of the pipe with only two sensors. We validate the concepts by building a prototype and evaluate the system's performance under real conditions in an experimental laboratory setup.},
keywords = {Control Theory, Experimentation, Inspection, Physical System Modeling, repair & intelligence for water distribution pipes, Robotics & Automation},
pubstate = {published},
tppubtype = {article}
}
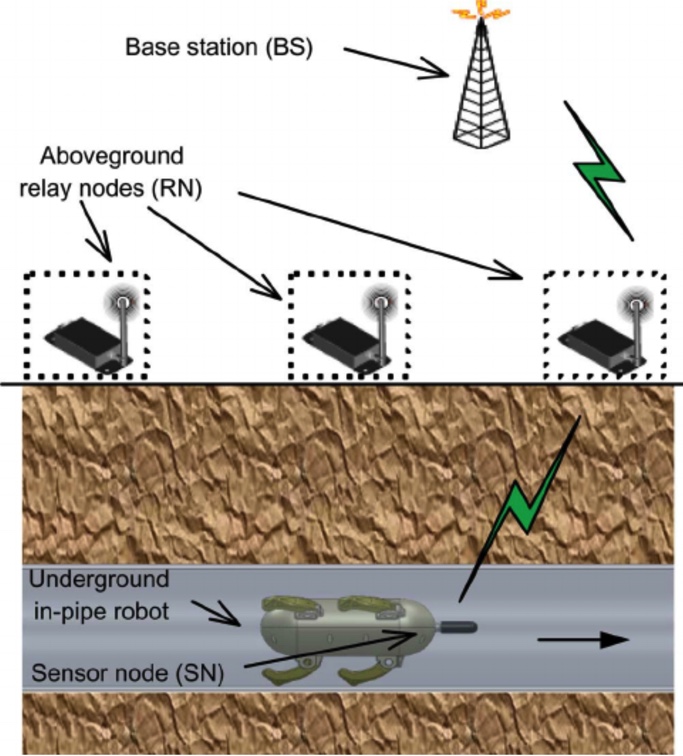
Dalei Wu; Dimitris Chatzigeorgiou; Kamal Youcef-Toumi; Samir Mekid; Rached Ben-Mansour
Channel-Aware Relay Node Placement in Wireless Sensor Networks for Pipeline Inspection Proceedings Article
In: Proceedings of the American Control Conference (2013), ACC ACC, 2014, ISSN: 1536-1276.
Abstract | Links | BibTeX | Tags: Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Node_Pipeline_Inspection,
title = {Channel-Aware Relay Node Placement in Wireless Sensor Networks for Pipeline Inspection},
author = {Dalei Wu and Dimitris Chatzigeorgiou and Kamal Youcef-Toumi and Samir Mekid and Rached Ben-Mansour},
url = {https://www.researchgate.net/publication/261282962_Channel-Aware_Relay_Node_Placement_in_Wireless_Sensor_Networks_for_Pipeline_Inspection},
doi = {10.1109/TWC.2014.2314120},
issn = {1536-1276},
year = {2014},
date = {2014-03-24},
booktitle = {Proceedings of the American Control Conference (2013)},
publisher = {ACC},
organization = {ACC},
abstract = {Wireless sensor networks (WSNs) provide an effective approach for underground pipeline inspection. Such WSNs comprise of sensor nodes (SNs) and relay nodes (RNs) for information sensing and communication. WSNs can perform accurate and realtime inspection, especially in adverse environments. However, transmitting information between underground and aboveground nodes is very challenging due to the mobility and limited energy supply of the SNs as well as complex radio propagation environment. Therefore, proper deployment of a WSN is critical to provide reliable communications and efficient inspection. This paper presents a methodology for deploying aboveground RNs in WSNs. Specifically, it provides an optimum placement of RNs along with energy use so as to allow reliable communications. This method takes into account characteristics of the wireless channels, energy consumption, pipeline coverage requirements, and SN's transmission power levels. The paper provides a path loss model for radio propagation over multiple transmission media and an algorithm for optimization of RN placement and SN's transmission power. Simulation results show the efficacy of the proposed framework.},
keywords = {Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
2013
Apoorva Santhosh; Amro M Farid; Kamal Youcef-Toumi
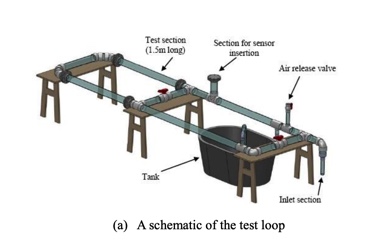
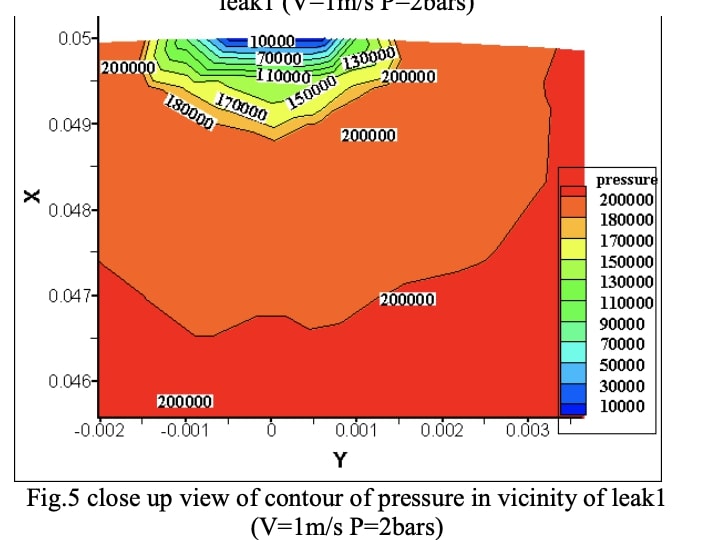
Design and Evaluation of an In-Pipe Leak Detection Sensing Technique Based on Force Transduction Proceedings Article
In: ASME 2012 International Mechanical Engineering Congress and Exposition, IEEE IEEE, 2013, ISBN: 978-0-7918-4520-2.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Force_Transduction_Leaking,
title = {Design and Evaluation of an In-Pipe Leak Detection Sensing Technique Based on Force Transduction},
author = {Apoorva Santhosh and Amro M Farid and Kamal Youcef-Toumi},
url = {https://asmedigitalcollection.asme.org/IMECE/proceedings/IMECE2012/45202/489/254570},
doi = {10.1115/IMECE2012-87493},
isbn = {978-0-7918-4520-2},
year = {2013},
date = {2013-10-08},
booktitle = {ASME 2012 International Mechanical Engineering Congress and Exposition},
publisher = {IEEE},
organization = {IEEE},
abstract = {Leakage is the major factor for unaccounted fluid losses in almost every pipe network. In most cases the deleterious effects associated with the occurrence of leaks may present serious economical and health problems and therefore, leaks must be quickly detected, located and repaired. The problem of leakage becomes even more serious when it is concerned with the vital supply of fresh water to the community. Leaking water pipelines can develop large health threats to people mostly because of the infiltration of contaminants into the water network. Such possibilities of environmental health disasters have spurred research into the development of methods for pipeline leakage detection. Most state of the art leak detection techniques have limited applicability, while some of them are not reliable enough and sometimes depend on user experience. Our goal in this work is to design and develop a reliable leak detection sensing system. The proposed technology utilizes the highly localized pressure gradient in the vicinity of a small opening due to leakage in a pressurized pipeline. In this paper we study this local phenomenon in detail and try to understand it with the help of numerical simulations in leaking pipelines (CFD studies). Finally a new system for leak detection is presented. The proposed system is designed in order to reduce the number of sensing elements required for detection. The main concept and detailed design are laid out. A prototype is fabricated and presented as a proof of concept. The prototype is tested in a simple experimental setup with artificial leakages for experimental evaluation. The sensing technique discussed in this work can be deployed in water, oil and gas pipelines without significant changes in the design, since the concepts remain the same in all cases.},
keywords = {Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
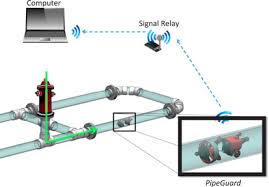
Dimitris Chatzigeorgiou; You Wu; Kamal Youcef-Toumi; Rached Ben-Mansour
Reliable Sensing of Leaks in Pipelines Proceedings Article
In: AWWA Annual Conference and Exposition, 2014, ASME ASME, 2013, ISBN: 978-0-7918-5613-0.
Abstract | Links | BibTeX | Tags: Inspection; repair and intelligence for water distribution pipes, Physical Systems Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Reliable_Leak_Sensing,
title = {Reliable Sensing of Leaks in Pipelines},
author = {Dimitris Chatzigeorgiou and You Wu and Kamal Youcef-Toumi and Rached Ben-Mansour},
url = {https://www.academia.edu/8791279/Chatzigeorgiou_D._Wu_Y._Youcef-Toumi_K._and_Ben-Mansour_R._Reliable_Sensing_of_Leaks_in_Pipelines_ASME_Dynamic_Systems_and_Control_Conference_2013},
isbn = {978-0-7918-5613-0},
year = {2013},
date = {2013-01-01},
booktitle = {AWWA Annual Conference and Exposition, 2014},
publisher = {ASME},
organization = {ASME},
abstract = {Leakage is the major factor for unaccounted losses in every pipe network around the world (oil, gas or water). In most cases the deleterious effects associated with the occurrence of leaks may present serious economical and health problems. Therefore, leaks must be quickly detected, located and repaired. Unfortunately, most state of the art leak detection systems have limited applicability, are neither reliable nor robust, while others depend on user experience. In this work we present a new in-pipe leak detection system, PipeGuard. PipeGuard performs autonomous leak detection in pipes and, thus, eliminates the need for user experience. This paper focuses on the detection module and its main characteristics. Detection in based on the presence of a pressure gradient in the neighborhood of the leak. Moreover, the proposed detector can sense leaks at any angle around the circumference of the pipe with only two sensors. We have validated the concepts by building a prototype and evaluated its performance under real conditions in an experimental laboratory setup.},
keywords = {Inspection; repair and intelligence for water distribution pipes, Physical Systems Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
Changrak Choi; Kamal Youcef-Toumi
Robot design for high flow liquid pipe networks Proceedings Article
In: 2013 IEEE/RSJ International Conference onIntelligent Robots and Systems (IROS), pp. 246-251, IEEE IEEE, 2013.
Abstract | Links | BibTeX | Tags: Experimentation, Fabrication, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation
@inproceedings{MRL_WDP_High_Flow_Pipe_Robot,
title = {Robot design for high flow liquid pipe networks},
author = {Changrak Choi and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=6696360&isnumber=6696319},
doi = {10.1109/IROS.2013.6696360},
year = {2013},
date = {2013-01-01},
booktitle = {2013 IEEE/RSJ International Conference onIntelligent Robots and Systems (IROS)},
pages = {246-251},
publisher = {IEEE},
organization = {IEEE},
abstract = {In-pipe robots are important for inspection of pipe network that form vital infrastructure of modern society. Nevertheless, most in-pipe robots developed so far are targeted at working inside gas pipes and not suitable for liquid pipes. This paper presents a new approach for designing in-pipe robot to work inside a liquid environment in the presence of high drag forces. Three major subsystems - propulsion, braking, and turning - are described in detail with new concepts and mechanisms that differ from conventional in-pipe robots. Prototypes of each subsystem are designed, built and tested for validation. Resulting is a robot design that navigates efficiently inside liquid pipe network and can be used for practical inspection purposes.},
keywords = {Experimentation, Fabrication, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
2012
Atia E Khalifa; Rached Ben-Mansour; Kamal Youcef-Toumi; Changrak Choi
Characterization of In-Pipe Acoustic Wave for Water Leak Detection Proceedings Article
In: ASME 2011 International Mechanical Engineering Congress and Exposition, pp. 995-1000, ACC ACC, 2012, ISBN: 978-0-7918-5494-5.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Acoustic_Wave_Pipe_Leakage,
title = {Characterization of In-Pipe Acoustic Wave for Water Leak Detection},
author = {Atia E Khalifa and Rached Ben-Mansour and Kamal Youcef-Toumi and Changrak Choi},
url = {https://asmedigitalcollection.asme.org/IMECE/proceedings/IMECE2011/54945/995/355499},
doi = {10.1115/IMECE2011-62333},
isbn = {978-0-7918-5494-5},
year = {2012},
date = {2012-08-01},
booktitle = {ASME 2011 International Mechanical Engineering Congress and Exposition},
pages = {995-1000},
publisher = {ACC},
organization = {ACC},
abstract = {This paper presents experimental observations on the characteristics of the acoustic signal propagation and attenuation inside water-filled pipes. An acoustic source (exciter) is mounted on the internal pipe wall, at a fixed location, and produces a tonal sound to simulate a leak noise with controlled frequency and amplitude, under different flow conditions. A hydrophone is aligned with the pipe centerline and can be re-positioned to capture the acoustic signal at different locations. Results showed that the wave attenuation depends on the source frequency and the line pressure. High frequency signals get attenuated more with increasing distance from the source. The optimum location to place the hydrophone for capturing the acoustic signal is not at the vicinity of source location. The optimum location also depends on the frequency and line pressure. It was also observed that the attenuation of the acoustic waves is higher in more flexible pipes like PVC ones.},
keywords = {Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
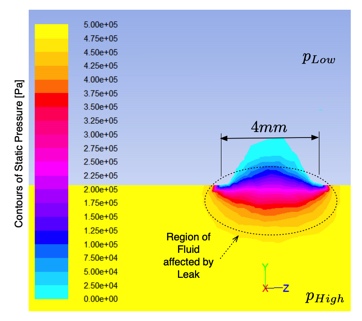
Rached Ben-Mansour; Kabir Suara; Kamal Youcef-Toumi
Determination of important flow characteristics for leak detection in water pipelines-networks Journal Article
In: Computational Thermal Sciences, vol. 5, pp. 143-151, 2012, ISSN: 143-151.
Abstract | Links | BibTeX | Tags: Control Theory, Inspection, Physical System Modeling, repair & intelligence for water distribution pipes, Robotics & Automation, Simulation
@article{MRL_AFM_Flow_Leak_Detection,
title = {Determination of important flow characteristics for leak detection in water pipelines-networks},
author = {Rached Ben-Mansour and Kabir Suara and Kamal Youcef-Toumi},
url = {http://www.dl.begellhouse.com/journals/648192910890cd0e,1c6ade0932d1248e,18dcce9156c09e65.html},
doi = {10.1615/ComputThermalScien.2013006301},
issn = {143-151},
year = {2012},
date = {2012-07-16},
journal = {Computational Thermal Sciences},
volume = {5},
pages = {143-151},
publisher = {begellhouse},
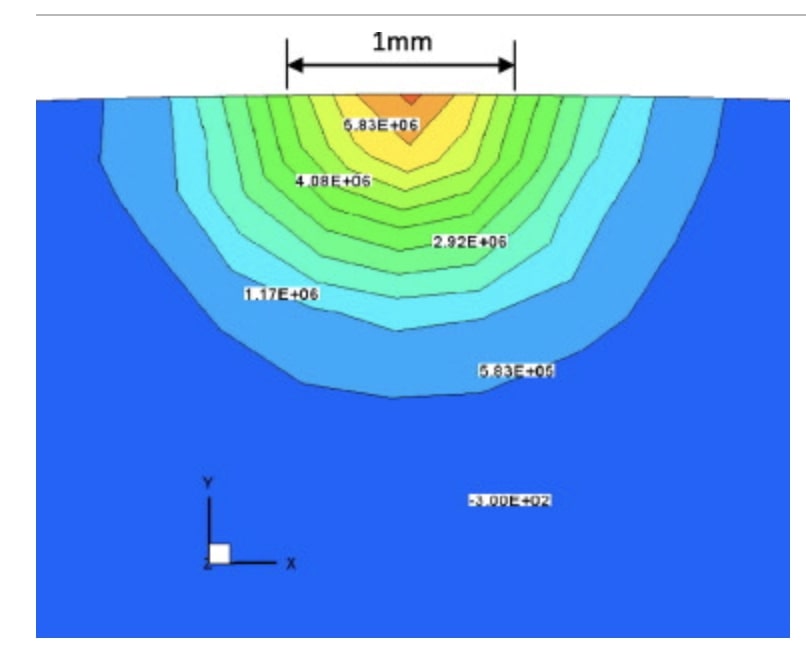
abstract = {The accuracy of a leak detection method depends greatly on the flow and leak parameters in a given pipeline. This paper gives some insight into the flow characteristics around simulated small leaks. The present computational fluid dynamics (CFD) studies have indicated clear distinctive features in fluid pressure and fluid acceleration that can be used for the early detection of small leaks (<1 of the total flow) in water distribution pipelines. The present CFD simulations based on a steady state standard к − ε turbulent flow model are carried out for different pressure lines in 4 in. (100 m) ID pipe. Based on these simulations, it has been found out that the pressure gradients in the vicinity of the leaks are quite large, hence a leak detection method based on pressure gradient measurement is proposed. In addition, these simulations have shown remarkable gradients in the axial flow acceleration along the centerline of the pipe. These discovered flow features can offer another leak detection method based on the use of accelerometers.},
keywords = {Control Theory, Inspection, Physical System Modeling, repair & intelligence for water distribution pipes, Robotics & Automation, Simulation},
pubstate = {published},
tppubtype = {article}
}
Dimitris M Chatzigeorgiou; Atia E Khalifa; Kamal Youcef-Toumi; Rached Ben-Mansour
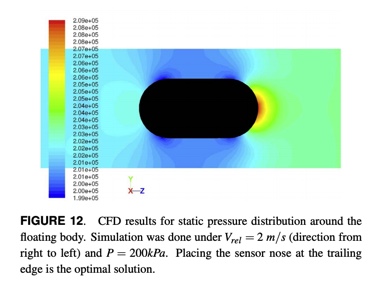
An In-Pipe Leak Detection Sensor: Sensing Capabilities and Evaluation Proceedings Article
In: ASME 2011 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, pp. 481-489, ACC ACC, 2012, ISBN: 978-0-7918-5480-8.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Leak_Capability_Sensor,
title = {An In-Pipe Leak Detection Sensor: Sensing Capabilities and Evaluation},
author = {Dimitris M Chatzigeorgiou and Atia E Khalifa and Kamal Youcef-Toumi and Rached Ben-Mansour},
url = {https://asmedigitalcollection.asme.org/IDETC-CIE/proceedings/IDETC-CIE2011/54808/481/351961},
doi = {10.1115/DETC2011-48411},
isbn = {978-0-7918-5480-8},
year = {2012},
date = {2012-06-12},
booktitle = {ASME 2011 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference},
pages = {481-489},
publisher = {ACC},
organization = {ACC},
abstract = {In most cases the deleterious effects associated with the occurrence of leak may present serious problems and therefore leaks must be quickly detected, located and repaired. The problem of leakage becomes even more serious when it is concerned with the vital supply of fresh water to the community. In addition to waste of resources, contaminants may infiltrate into the water supply. The possibility of environmental health disasters due to delay in detection of water pipeline leaks has spurred research into the development of methods for pipeline leak and contamination detection. Leaks in water pipes create acoustic emissions, which can be sensed to identify and localize leaks. Leak noise correlators and listening devices have been reported in the literature as successful approaches to leak detection but they have practical limitations in terms of cost, sensitivity, reliability and scalability. To overcome those limitations the development of an in-pipe traveling leak detection system is proposed. The development of such a system requires a clear understanding of acoustic signals generated from leaks and the study of the variation of those signals with different pipe loading conditions, leak sizes and surrounding media. This paper discusses those signals and evaluates the merits of an in-pipe-floating sensor.},
keywords = {Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
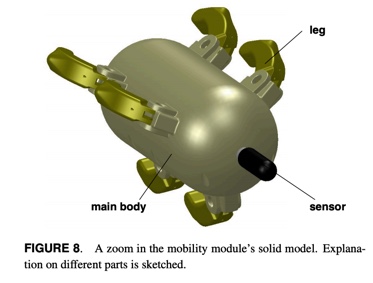
Dimitris M Chatzigeorgiou; Kamal Youcef-Toumi; Atia E Khalifa; Rached Ben-Mansour
Analysis and Design of an In-Pipe System for Water Leak Detection Proceedings Article
In: ASME 2011 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, pp. 1007-1016, ASME ASME, 2012, ISBN: 978-0-7918-5482-2.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Design_Water_Leak_Detection,
title = {Analysis and Design of an In-Pipe System for Water Leak Detection},
author = {Dimitris M Chatzigeorgiou and Kamal Youcef-Toumi and Atia E Khalifa and Rached Ben-Mansour},
url = {https://asmedigitalcollection.asme.org/IDETC-CIE/proceedings/IDETC-CIE2011/54822/1007/353866},
doi = {10.1115/DETC2011-48395},
isbn = {978-0-7918-5482-2},
year = {2012},
date = {2012-06-12},
booktitle = {ASME 2011 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference},
pages = {1007-1016},
publisher = {ASME},
organization = {ASME},
abstract = {In most cases the deleterious effects associated with the occurrence of leaks may present serious problems and therefore, leaks must be quickly detected, located and repaired. The problem of leakage becomes even more serious when it is concerned with the vital supply of fresh water to the community. In addition to waste of resources, contaminants may infiltrate into the water supply. The possibility of environmental health disasters due to delay in detection of water pipeline leaks has spurred research into the development of methods for pipeline leak and contamination detection. Leaking in water networks has been a very significant problem worldwide, especially in developing countries, where water is sparse. Many different techniques have been developed to detect leaks, either from the inside or from the outside of the pipe; each one of them with their advantages, complexities but also limitations. To overcome those limitations we focus our work on the development of an in-pipe-floating sensor. The present paper discusses the design considerations of a novel autonomous system for in-pipe water leak detection. The system is carefully designed to be minimally invasive to the flow within the pipe and thus not to affect the delicate leak signal. One of its characteristics is the controllable motion inside the pipe. The system is capable of pinpointing leaks in pipes while operating in real network conditions, i.e. pressurized pipes and high water flow rates, which are major challenges.},
keywords = {Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
R Ben-Mansour; M A Habib; A Khalifa; K Youcef-Toumi; D Chatzigeorgiou
Computational fluid dynamic simulation of small leaks in water pipelines for direct leak pressure transduction Journal Article
In: Computers & Fluids, vol. 57, pp. 110-123, 2012, ISSN: 0045-7930.
Abstract | Links | BibTeX | Tags: Control Theory, Inspection, Physical System Modeling, repair & intelligence for water distribution pipes, Robotics & Automation, Simulation
@article{MRL_AFM_Dynamic_Simulation_Leak_Pipe,
title = {Computational fluid dynamic simulation of small leaks in water pipelines for direct leak pressure transduction},
author = {R Ben-Mansour and M A Habib and A Khalifa and K Youcef-Toumi and D Chatzigeorgiou},
url = {https://www.sciencedirect.com/science/article/pii/S0045793011003884},
doi = {https://doi.org/10.1016/j.compfluid.2011.12.016},
issn = {0045-7930},
year = {2012},
date = {2012-03-30},
journal = {Computers & Fluids},
volume = {57},
pages = {110-123},
publisher = {Science Direct},
abstract = {Computational fluid dynamic simulation of small leaks in a pipe having 0.1m diameter has been performed under realistic velocities and pressures using a 3D turbulent flow model of well tested CFD code. The steady state simulations have shown clear signature in the pressure and pressure gradient variations along the pipe. For very small leaks (below 1l/min), this signature in not very strong in the pressure variation, but very clear in the pressure gradient. The averaged power spectral density (PSD) as well as FFT of the pressure fluctuations based on transient Detached Eddy Simulations (DESs) are presented for different locations around the leak position. These results show that the presence of a leak causes measurable differences in the magnitude and frequency of the pressure signal spectrum and also in the averaged PSD for the range of 220–500Hz frequency.},
keywords = {Control Theory, Inspection, Physical System Modeling, repair & intelligence for water distribution pipes, Robotics & Automation, Simulation},
pubstate = {published},
tppubtype = {article}
}
2010
Dimitris M Chatzigeorgiou; Sumeet Kumar; Atia E Khalifa; Ajay Deshpande; Kamal Youcef-Toumi; Sanjay Sarma; Rached Ben-Mansour
In-pipe Acoustic Characterization of Leak Signals in Plastic Water-filled Pipes Proceedings Article
In: AWWA Annual Conference and Exposition (ACE) 2010, AWWA AWWA, 2010.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Acoustic_Leak_Signals,
title = {In-pipe Acoustic Characterization of Leak Signals in Plastic Water-filled Pipes},
author = {Dimitris M Chatzigeorgiou and Sumeet Kumar and Atia E Khalifa and Ajay Deshpande and Kamal Youcef-Toumi and Sanjay Sarma and Rached Ben-Mansour},
url = {https://www.researchgate.net/publication/277303127_In-pipe_Acoustic_Characterization_of_Leak_Signals_in_Plastic_Water-filled_Pipes},
year = {2010},
date = {2010-01-01},
booktitle = {AWWA Annual Conference and Exposition (ACE) 2010},
publisher = {AWWA},
organization = {AWWA},
abstract = {Acoustic emissions can be sensed to identify and localize leaks in water pipes. Leak noise correlators and listening devices have been reported in literature as successful approaches to leak detection but they have practical limitations in terms of cost, sensitivity, reliability and scalability. A possible efficient solution is the development of an in-pipe traveling leak detection system. It has been reported that in-pipe sensing is more accurate and efficient since the sensing element can be very close to the sound source. Currently in-pipe approaches are limited to large leaks and larger diameter pipes. Development of such a system requires clear understanding of acoustic signals generated from leaks and their variation with different pipe loading conditions, leak sizes and surrounding media. This paper discusses the acoustic characterization of leak signals in controlled environments. A lab experimental setup was designed and built in which measurements were taken from inside 4 inch PVC water pipes using a hydrophone. Signals were collected for a wide range of conditions: different pressures and leak flow rates to better understand the leak signal signatures. Experiments were conducted with different pipe connecting elements like valves and junctions, and different external conditions such as pipes placed in water, air and soil. Signals were collected at various distances from the leak location (upstream and downstream) to understand the opportunities of spatial cross-correlation techniques in localizing leaks and the effect of sensor position on the signal. Characterizations of different datasets are presented in frequency domain. The implications of acoustic characterization on the design of algorithms for leak detection are discussed and a simple algorithm to decide whether or not a leak is present near the sensor location is proposed, based on signal power calculations. The characterization gives insights, which will pave ways for the development of smart, autonomous pipe-traversing systems capable of detecting and localizing leaks on a city level water distribution network.},
keywords = {Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}