
Mechatronics Research Lab Publications
List still being populated due to webpage maintenance
2016
Taha Elmokadem; Mohamed Zribi; Kamal Youcef-Toumi
Terminal sliding mode control for the trajectory tracking of underactuated Autonomous Underwater Vehicles Journal Article
In: Ocean Engineering, vol. 129, pp. 613-625, 2016, ISSN: 0029-8018.
Abstract | Links | BibTeX | Tags: Computer vision for autonomous vehicle sensing, Instrumentation, Mechatronic Design, Physical System Modeling, Robotics & Automation
@article{MRL_AFM_Terminal_Trajectory_Tracking,
title = {Terminal sliding mode control for the trajectory tracking of underactuated Autonomous Underwater Vehicles},
author = {Taha Elmokadem and Mohamed Zribi and Kamal Youcef-Toumi},
url = {https://www.sciencedirect.com/science/article/pii/S0029801816304759},
doi = {https://doi.org/10.1016/j.oceaneng.2016.10.032},
issn = {0029-8018},
year = {2016},
date = {2016-11-06},
journal = {Ocean Engineering},
volume = {129},
pages = {613-625},
publisher = {elsevier},
abstract = {The aim of this paper is to develop robust control schemes for the lateral motion of underactuated autonomous underwater vehicles (AUVs). The AUV complex dynamics makes their control a challenging task. These challenges include the AUV nonlinear dynamics, unmodeled dynamics, system uncertainties and environmental disturbances. The objective of the proposed control schemes is to solve the trajectory tracking problem of AUVs. These controllers are designed using the concepts of terminal sliding mode control. The control performance of an example AUV (the REMUS AUV), using the proposed control schemes, is evaluated through computer simulations. The simulation results show that the proposed control schemes work well. Moreover, simulation studies are given to evaluate the performance of the proposed control schemes when bounded disturbances are acting on the vehicle. These studies indicate that the proposed control schemes are robust under bounded disturbances.},
keywords = {Computer vision for autonomous vehicle sensing, Instrumentation, Mechatronic Design, Physical System Modeling, Robotics & Automation},
pubstate = {published},
tppubtype = {article}
}
2015
Amith Somanath; Sertac Karaman; Kamal Youcef-Toumi
Controlling stochastic growth processes on lattices: Wildfire management with robotic fire extinguishers Proceedings Article
In: 53rd IEEE Conference on Decision and Control, pp. 1432-1437, IEEE IEEE, 2015, ISBN: 978-1-4673-6090-6.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Computer vision for autonomous vehicle sensing, intelligent systems, Physical System Modeling, Simulation
@inproceedings{MRL_AVS_Robotic_Wildfire_Control,
title = {Controlling stochastic growth processes on lattices: Wildfire management with robotic fire extinguishers},
author = {Amith Somanath and Sertac Karaman and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/7039602},
doi = {10.1109/CDC.2014.7039602},
isbn = {978-1-4673-6090-6},
year = {2015},
date = {2015-02-15},
booktitle = {53rd IEEE Conference on Decision and Control},
pages = {1432-1437},
publisher = {IEEE},
organization = {IEEE},
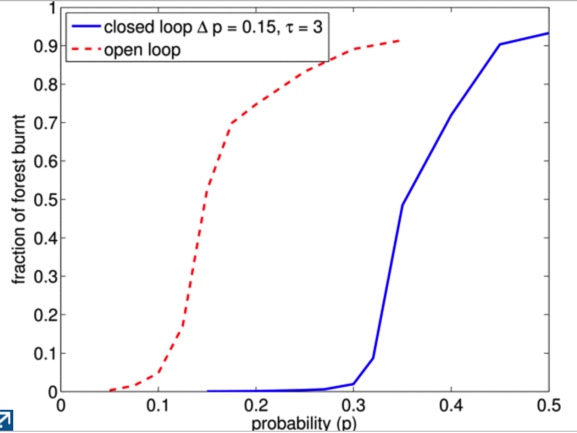
abstract = {Forest fires continue to cause considerable social and economic damage. Fortunately, the emergence of new robotics technologies, including capable autonomous unmanned aerial vehicles, may help improve wildfire management in the near future. In this paper, we characterize the number of vehicles required to combat wildfires, using a percolation-theoretic analysis that originated in the mathematical physics community. We model the wildfire as a stochastic growth process on a square lattice, where the local growth probabilities depend on the presence of robotic fire-extinguishing vehicles. We develop two control policies: First treats only a fraction of burning nodes at a given time, and the second treats burning nodes only at finite time intervals. We characterize the conditions under which these policies can stabilize a wildfire, i.e., ensure the fire stops eventually almost surely. We also provide computational results which demonstrate our theoretical analysis.},
keywords = {Algorithms, Computational Intelligence, Computer vision for autonomous vehicle sensing, intelligent systems, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
2014

David Donghyun Kim; You Wu; Antoine Noel; Kamal Youcef-Toumi
RIM Propeller for Micro Autonomous Underwater Vehicles Proceedings Article
In: ASME 2014 Dynamic Systems and Control Conference, ASME ASME, 2014, ISBN: 978-0-7918-4620-9.
Abstract | Links | BibTeX | Tags: Computer vision for autonomous vehicle sensing, Control Theory, Experimentation, Fabrication, intelligent systems, Mechatronic Design, Simulation
@inproceedings{MRL_AVS_AUV_RIM_Control,
title = {RIM Propeller for Micro Autonomous Underwater Vehicles},
author = {David Donghyun Kim and You Wu and Antoine Noel and Kamal Youcef-Toumi},
url = {https://asmedigitalcollection.asme.org/DSCC/proceedings/DSCC2014/46209/V003T44A005/229722},
doi = {10.1115/DSCC2014-6282},
isbn = {978-0-7918-4620-9},
year = {2014},
date = {2014-12-19},
booktitle = {ASME 2014 Dynamic Systems and Control Conference},
publisher = {ASME},
organization = {ASME},
abstract = {Micro autonomous underwater vehicles (AUVs) need small-scale, powerful and safe propulsion systems especially when they are performing missions in pipes and other confined environments. However, the most conventional propulsion systems do not satisfy all three requirements: small, powerful and safe. A micro propulsion system meeting those requirements are developed based on the RIM propeller concept. It is compact and powerful; the complete motor-propeller assembly is 33mm in diameter, 12mm in depth and 16g in weight, and it is capable of producing 0.4N thrust in static water given a 7.1W power input. The paper presents the design, manufacturing and integration of the micro RIM propeller in an AUV.},
keywords = {Computer vision for autonomous vehicle sensing, Control Theory, Experimentation, Fabrication, intelligent systems, Mechatronic Design, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}