
Mechatronics Research Lab Publications
List still being populated due to webpage maintenance
2020
L Yang; I Paranawithana; K Youcef-Toumi; U Tan
Confidence-Based Hybrid Tracking to Overcome Visual Tracking Failures in Calibration-Less Vision-Guided Micromanipulation Journal Article
In: IEEE Transactions on Automation Science and Engineering, vol. 17, no. 1, pp. 524-536, 2020, ISSN: 1558-3783.
Abstract | Links | BibTeX | Tags: Algorithms, Mechatronic Design, Nanotechnology, Physical System Modeling, Robotics & Automation
@article{MRL_AFM_Confidence_Based_Hybrid_Tracking,
title = {Confidence-Based Hybrid Tracking to Overcome Visual Tracking Failures in Calibration-Less Vision-Guided Micromanipulation},
author = {L Yang and I Paranawithana and K Youcef-Toumi and U Tan},
doi = {10.1109/TASE.2019.2932724},
issn = {1558-3783},
year = {2020},
date = {2020-01-01},
journal = {IEEE Transactions on Automation Science and Engineering},
volume = {17},
number = {1},
pages = {524-536},
publisher = {IEEE},
abstract = {This article proposes a confidence-based approach for combining two visual tracking techniques to minimize the influence of unforeseen visual tracking failures to achieve uninterrupted vision-based control. Despite research efforts in vision-guided micromanipulation, existing systems are not designed to overcome visual tracking failures, such as inconsistent illumination condition, regional occlusion, unknown structures, and nonhomogenous background scene. There remains a gap in expanding current procedures beyond the laboratory environment for practical deployment of vision-guided micromanipulation system. A hybrid tracking method, which combines motion-cue feature detection and score-based template matching, is incorporated in an uncalibrated vision-guided workflow capable of self-initializing and recovery during the micromanipulation. Weighted average, based on the respective confidence indices of the motion-cue feature localization and template-based trackers, is inferred from the statistical accuracy of feature locations and the similarity score-based template matches. Results suggest improvement of the tracking performance using hybrid tracking under the conditions. The mean errors of hybrid tracking are maintained at subpixel level under adverse experimental conditions while the original template matching approach has mean errors of 1.53, 1.73, and 2.08 pixels. The method is also demonstrated to be robust in the nonhomogeneous scene with an array of plant cells. By proposing a self-contained fusion method that overcomes unforeseen visual tracking failures using pure vision approach, we demonstrated the robustness in our developed low-cost micromanipulation platform.},
keywords = {Algorithms, Mechatronic Design, Nanotechnology, Physical System Modeling, Robotics & Automation},
pubstate = {published},
tppubtype = {article}
}
2019
Kevin Vanslette; Tony Tohme; Kamal Youcef-Toumi
A general model validation and testing tool Journal Article
In: Reliability Engineering & System Safety, vol. 195, pp. 106684, 2019, ISSN: 0951-8320.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Control Theory, Experimentation, intelligent systems, Probabilistic neural networks for robust machine learning, Simulation
@article{MRL_Model_Validation_Testing,
title = {A general model validation and testing tool},
author = {Kevin Vanslette and Tony Tohme and Kamal Youcef-Toumi},
url = {https://www.sciencedirect.com/science/article/pii/S0951832019302571},
doi = {https://doi.org/10.1016/j.ress.2019.106684},
issn = {0951-8320},
year = {2019},
date = {2019-10-28},
journal = {Reliability Engineering & System Safety},
volume = {195},
pages = {106684},
publisher = {Elsevier BV},
abstract = {We construct and propose the “Bayesian Validation Metric” (BVM) as a general model validation and testing tool. We find the BVM to be capable of representing all of the standard validation metrics (square error, reliability, probability of agreement, frequentist, area, probability density comparison, statistical hypothesis testing, and Bayesian model testing) as special cases and find that it can be used to improve, generalize, or further quantify their uncertainties. Thus, the BVM allows us to assess the similarities and differences between existing validation metrics in a new light. The BVM has the capacity to allow users to invent and select models according to novel validation requirements. We formulate and test a few novel compound validation metrics that improve upon other validation metrics in the literature. Further, we construct the BVM Ratio for the purpose of quantifying model selection under user defined definitions of agreement in the presence or absence of uncertainty. This construction generalizes the Bayesian model testing framework.},
keywords = {Algorithms, Computational Intelligence, Control Theory, Experimentation, intelligent systems, Probabilistic neural networks for robust machine learning, Simulation},
pubstate = {published},
tppubtype = {article}
}
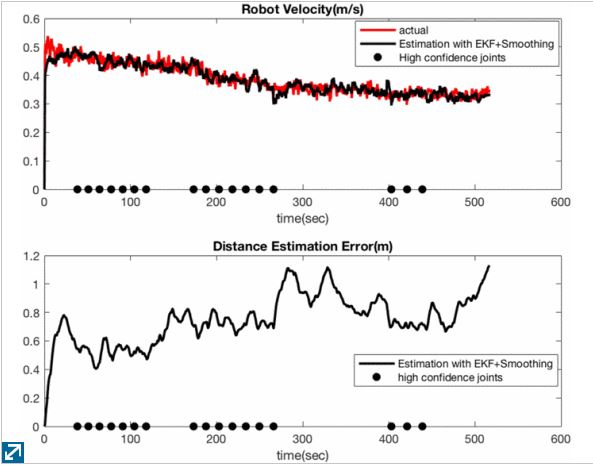
You Wu; Elizabeth Mittmann; Crystal Winston; Kamal Youcef-Toumi
A Practical Minimalism Approach to In-pipe Robot Localization Proceedings Article
In: 2019 American Control Conference (ACC), pp. 3180-3187, IEEE IEEE, 2019, ISBN: 978-1-5386-7926-5.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Pipe_Robot_Localization,
title = {A Practical Minimalism Approach to In-pipe Robot Localization},
author = {You Wu and Elizabeth Mittmann and Crystal Winston and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/8814648},
doi = {10.23919/ACC.2019.8814648},
isbn = {978-1-5386-7926-5},
year = {2019},
date = {2019-08-19},
booktitle = {2019 American Control Conference (ACC)},
pages = {3180-3187},
publisher = {IEEE},
organization = {IEEE},
abstract = {Water pipe leakage is a common and significant problem around the world. In recent years, an increasing amount of effort has been put into developing effective leak detection solutions for water pipes. Among them, the pressure gradient based method developed at the Massachusetts Institute of Technology excels for its sensitivity in low pressure, small diameter pipes. It can also work in both plastic and metallic pipes. However, in order for leaks detected to be fixed, one must also know the locations of the leaks. In addition, sensing the robot's location via GPS or remote sensors requires greater power and relies on certain ground properties. Thus this paper sets out to localize the robot using only the on board sensors which are an IMU, gyro, and the leak sensors. Through pipe joint measurement and the extended Kalman filter simulations show the tracking error is about 0.5% of the total distance of the robotic inspection. With a minimal number of additional leak sensors added, a complementary method was developed to function in more heavily tuberculated pipes.},
keywords = {Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
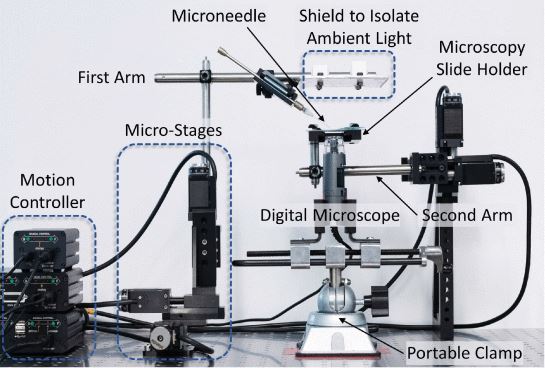
Ishara Paranawithana; Zhong Hoo Chau; Liangjing Yang; Zhong Chen; Kamal Youcef-Toumi; U-Xuan Tan
Automatic Targeting of Plant Cells via Cell Segmentation and Robust Scene-Adaptive Tracking Proceedings Article
In: 2019 International Conference on Robotics and Automation (ICRA), pp. 7116-7122, IEEE IEEE, 2019, ISBN: 978-1-5386-6027-0.
Abstract | Links | BibTeX | Tags: Algorithms, Biological device for cancer cell characterization, Computational Intelligence, Experimentation, Mechatronic Design, Nanotechnology, Visualization
@inproceedings{MRL_AFM_Cell_Segment_Targeting,
title = {Automatic Targeting of Plant Cells via Cell Segmentation and Robust Scene-Adaptive Tracking},
author = {Ishara Paranawithana and Zhong Hoo Chau and Liangjing Yang and Zhong Chen and Kamal Youcef-Toumi and U-Xuan Tan},
url = {https://ieeexplore.ieee.org/document/8793944},
doi = {10.1109/ICRA.2019.8793944},
isbn = {978-1-5386-6027-0},
year = {2019},
date = {2019-08-12},
booktitle = {2019 International Conference on Robotics and Automation (ICRA)},
pages = {7116-7122},
publisher = {IEEE},
organization = {IEEE},
abstract = {Automatic targeting of plant cells to perform tasks like extraction of chloroplast is often desired in the study of plant biology. Hence, this paper proposes an improved cell segmentation method combined with a robust tracking algorithm for vision-guided micromanipulation in plant cells. The objective of this work is to develop an automatic plant cell detection and localization technique to complete the automated workflow for plant cell manipulation. The complex structural properties of plant cells make both segmentation of cells and visual tracking of the microneedle immensely challenging, unlike single animal cell applications. Thus, an improved version of watershed segmentation with adaptive thresholding is proposed to detect the plant cells without the need for staining of the cells or additional tedious preparations. To manipulate the needle to reach the identified centroid of the cells, tracking of the needle tip is required. Visual and motion information from two data sources namely, template tracking and projected manipulator trajectory are combined using score-based normalized weighted averaging to continuously track the microneedle. The selection of trackers is influenced by their complementary nature as the former and latter are individually robust against physical and visual uncertainties, respectively. Experimental results validate the effectiveness of the proposed method by detecting plant cell centroids accurately, tracking the microneedle constantly and reaching the plant cell of interest despite the presence of visual disturbances.},
keywords = {Algorithms, Biological device for cancer cell characterization, Computational Intelligence, Experimentation, Mechatronic Design, Nanotechnology, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
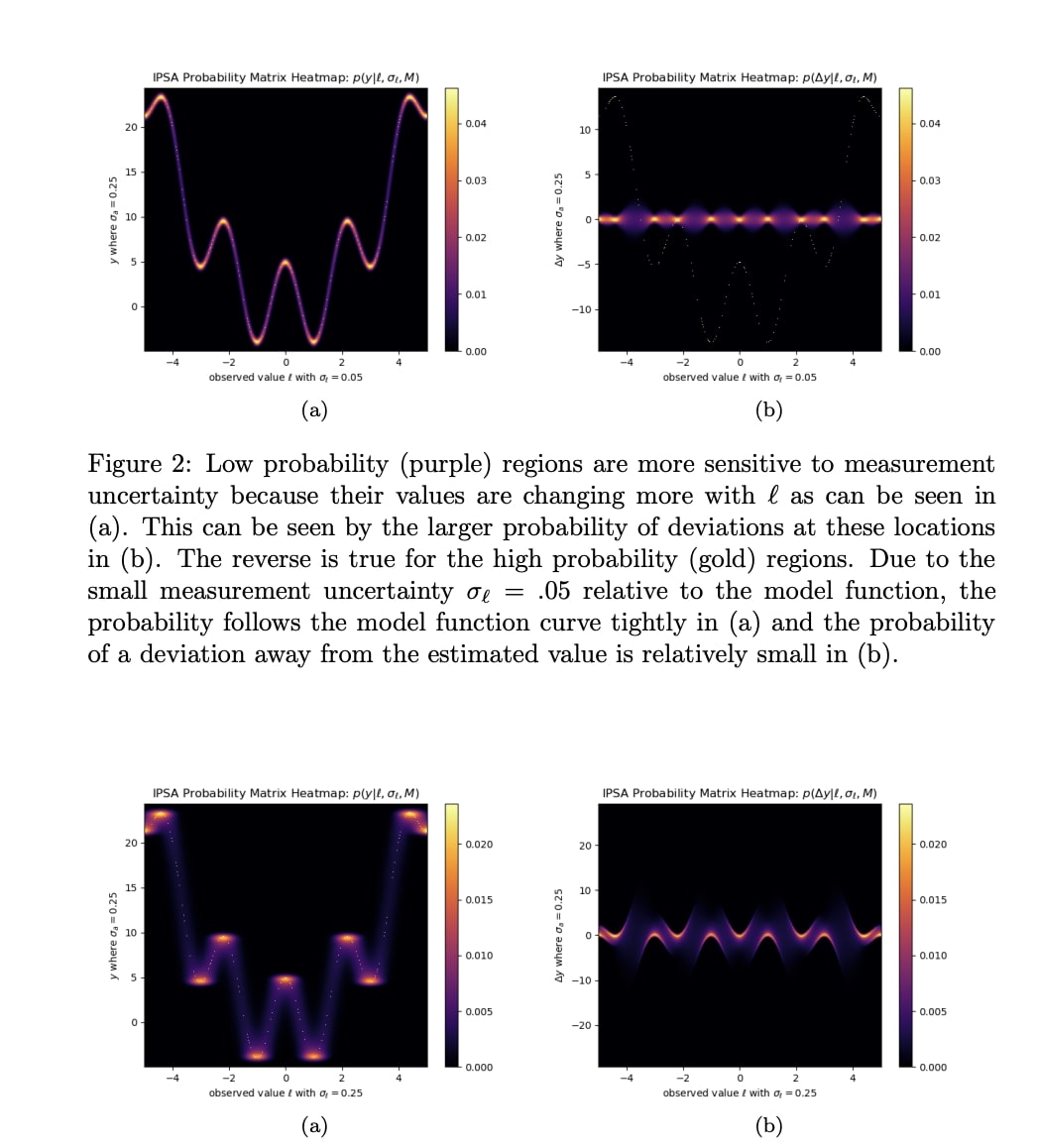
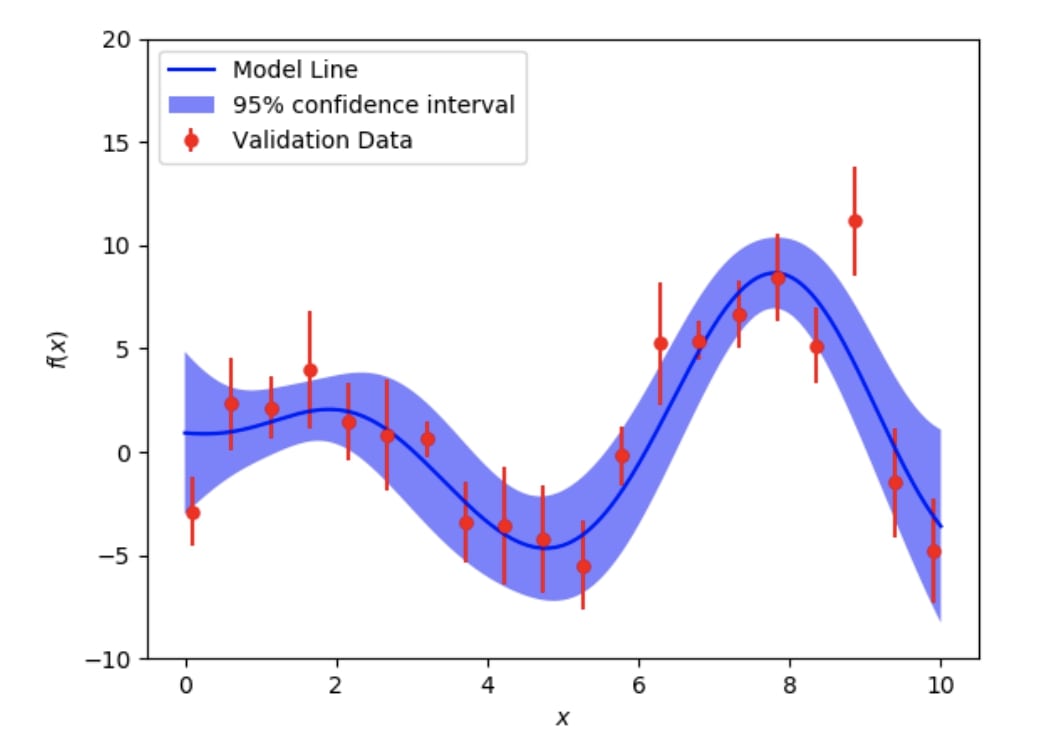
Kevin Vanslette; Arwa Alanqari; Zeyad Al-awwad; Kamal Youcef-Toumi
Vectorized Uncertainty Propagation and Input Probability Sensitivity Analysis Journal Article
In: 2019.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Experimentation, Uncertainty estimation and calibration for modeling
@article{MRL_AFM_Vectorized_Uncertainty_Input_Probability,
title = {Vectorized Uncertainty Propagation and Input Probability Sensitivity Analysis},
author = {Kevin Vanslette and Arwa Alanqari and Zeyad Al-awwad and Kamal Youcef-Toumi},
url = {https://arxiv.org/abs/1908.11246},
doi = {1908.11246v1},
year = {2019},
date = {2019-06-04},
publisher = {King Abdulaziz City for Science and Technology},
abstract = {In this article we construct a theoretical and computational process for assessing Input Probability Sensitivity Analysis (IPSA) using a Graphics Processing Unit (GPU) enabled technique called Vectorized Uncertainty
Propagation (VUP). VUP propagates probability distributions through
a parametric computational model in a way that’s computational time
complexity grows sublinearly in the number of distinct propagated input probability distributions. VUP can therefore be used to efficiently
implement IPSA, which estimates a model’s probabilistic sensitivity to
measurement and parametric uncertainty over each relevant measurement
location. Theory and simulation illustrate the effectiveness of these methods.},
keywords = {Algorithms, Computational Intelligence, Experimentation, Uncertainty estimation and calibration for modeling},
pubstate = {published},
tppubtype = {article}
}
Propagation (VUP). VUP propagates probability distributions through
a parametric computational model in a way that’s computational time
complexity grows sublinearly in the number of distinct propagated input probability distributions. VUP can therefore be used to efficiently
implement IPSA, which estimates a model’s probabilistic sensitivity to
measurement and parametric uncertainty over each relevant measurement
location. Theory and simulation illustrate the effectiveness of these methods.
Ali Jahanian; Quang H Le; Kamal Youcef-Toumi; Dzmitry Tsetserukou
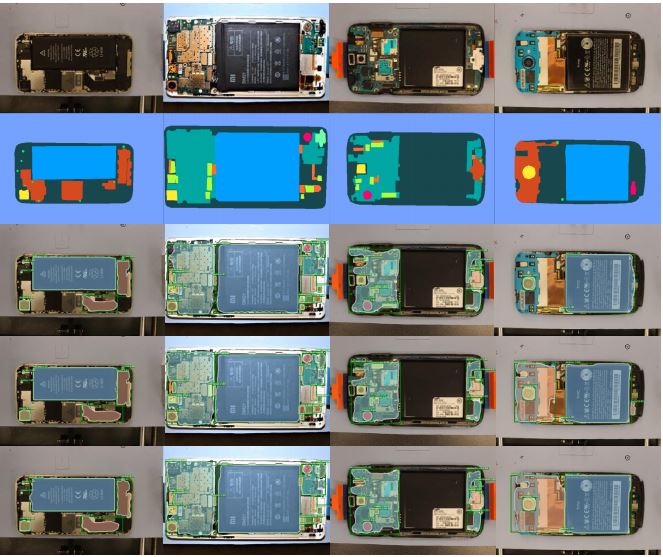
See the E-Waste! Training Visual Intelligence to See Dense Circuit Boards for Recycling Proceedings Article
In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, 2019.
Abstract | Links | BibTeX | Tags: Algorithms, Automated cellphone recycling, Computational Intelligence, Experimentation, Mechatronic Design, Robotics & Automation, Visualization
@inproceedings{MRL_AFM_Training_CB_Recycling,
title = {See the E-Waste! Training Visual Intelligence to See Dense Circuit Boards for Recycling},
author = {Ali Jahanian and Quang H Le and Kamal Youcef-Toumi and Dzmitry Tsetserukou},
url = {https://openaccess.thecvf.com/content_CVPRW_2019/html/cv4gc/Jahanian_See_the_E-Waste_Training_Visual_Intelligence_to_See_Dense_Circuit_CVPRW_2019_paper.html},
year = {2019},
date = {2019-06-01},
booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops},
abstract = {The state-of-the-art semantic segmentation and object detection deep learning models are taking the leap to generalize and leverage automation, but have yet to be useful in real-world tasks such as those in dense circuit board robotic manipulation. Consider a cellphone circuit board that because of small components and a couple of hundred microns gaps between them challenges any manipulation task. For effective automation and robotics usage in manufacturing, we tackle this problem by building a convolutional neural networks optimized for multi-task learning of instance semantic segmentation and detection while accounting for crisp boundaries of small components inside dense boards. We explore the feature learning mechanism, and add the auxiliary task of boundary detection to encourage the network to learn the objects' geometric properties along with the other objectives. We examine the performance of the networks in the visual tasks (separately and all together), and the extent of generalization on the recycling phone dataset. Our network outperformed the state-of-the-art in the visual tasks while maintaining the high speed of computation. To facilitate this globally concerning topic, we provide a benchmark for Ewaste visual tasks research, and publicize our collected dataset and code, as well as demos on our in-lab robot at https://github.com/MIT-MRL/recybot. pubstate = published},
keywords = {Algorithms, Automated cellphone recycling, Computational Intelligence, Experimentation, Mechatronic Design, Robotics & Automation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
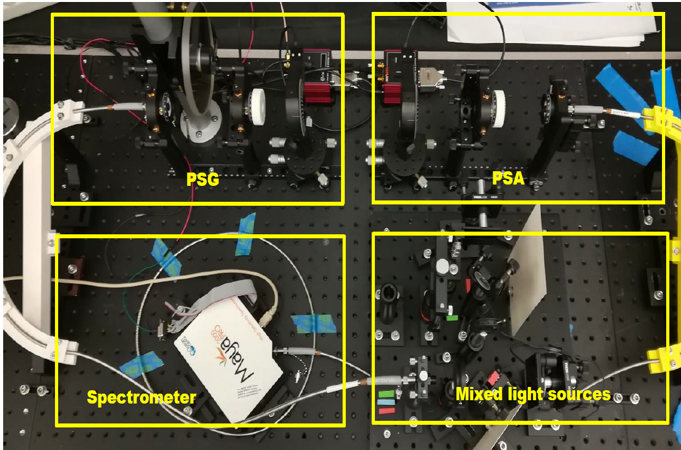
Kai Meng; Bo Jiang; Christos D Samolis; Mohamad Alrished; Kamal Youcef-Toumi
Unevenly spaced continuous measurement approach for dual rotating--retarder Mueller matrix ellipsometry Journal Article
In: Opt. Express, vol. 27, no. 10, pp. 14736–14753, 2019, ISSN: 1094-4087.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Intelligent optical characterization for nano-manufacturing, Nanotechnology, Physical System Modeling
@article{MRL_AFM_Dual_Rotating_Retarder_Mueller,
title = {Unevenly spaced continuous measurement approach for dual rotating--retarder Mueller matrix ellipsometry},
author = {Kai Meng and Bo Jiang and Christos D Samolis and Mohamad Alrished and Kamal Youcef-Toumi},
url = {http://www.opticsexpress.org/abstract.cfm?URI=oe-27-10-14736},
doi = {10.1364/OE.27.014736},
issn = {1094-4087},
year = {2019},
date = {2019-05-01},
journal = {Opt. Express},
volume = {27},
number = {10},
pages = {14736--14753},
publisher = {OSA},
abstract = {In order to efficiently extract the sample Mueller matrix by dual rotating–retarder ellipsometry, it is critical for the data reduction technique to achieve a minimal data processing burden while considering the ease of retarder control. In this paper, we propose an unevenly spaced sampling strategy to reach a globally optimal measurement matrix with minimum sampling points for continuous measurements. Taking into account the robustness to both systematic errors and detection noise, we develop multi-objective optimization models to identify the optimal unevenly spaced sampling points. A combined global search algorithm based on the multi-objective genetic algorithm is subsequently designed to solve our model. Finally, simulations and experiments are conducted to validate our approach as well as to provide near-optimal schemes for different design scenarios. The results demonstrate that significant improvement on error immunity performance can be achieved by applying an unevenly sampled measurement strategy compared to an evenly sampled one for our ellipsometer scenario.},
keywords = {Algorithms, Computational Intelligence, Intelligent optical characterization for nano-manufacturing, Nanotechnology, Physical System Modeling},
pubstate = {published},
tppubtype = {article}
}
2018

Lina Altoaimy; Arwa Alromih; Shiroq Al-Megren; Ghada Al-Hudhud; Heba Kurdi; Kamal Youcef-Toumi
Context-Aware Gossip-Based Protocol for Internet of Things Applications Journal Article
In: Sensors, vol. 18, no. 7, 2018, ISSN: 1424-8220.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Data-driven learning for intelligent machine maintenance, intelligent systems
@article{MRL_AFM_Gossip_Protocal_Internet_App,
title = {Context-Aware Gossip-Based Protocol for Internet of Things Applications},
author = {Lina Altoaimy and Arwa Alromih and Shiroq Al-Megren and Ghada Al-Hudhud and Heba Kurdi and Kamal Youcef-Toumi},
url = {https://www.mdpi.com/1424-8220/18/7/2233},
doi = {10.3390/s18072233},
issn = {1424-8220},
year = {2018},
date = {2018-07-11},
journal = {Sensors},
volume = {18},
number = {7},
publisher = {MDPI},
abstract = {This paper proposes a gossip-based protocol that utilises a multi-factor weighting function (MFWF) that takes several parameters into account: residual energy, Chebyshev distances to neighbouring nodes and the sink node, node density, and message priority. The effects of these parameters were examined to guide the customization of the weight function to effectively disseminate data to three types of IoT applications: critical, bandwidth-intensive, and energy-efficient applications. The performances of the three resulting MFWFs were assessed in comparison with the performances of the traditional gossiping protocol and the Fair Efficient Location-based Gossiping (FELGossiping) protocol in terms of end-to-end delay, network lifetime, rebroadcast nodes, and saved rebroadcasts. The experimental results demonstrated the proposed protocol’s ability to achieve a much shorter delay for critical IoT applications. For bandwidth-intensive IoT application, the proposed protocol was able to achieve a smaller percentage of rebroadcast nodes and an increased percentage of saved rebroadcasts, i.e., better bandwidth utilisation. The adapted MFWF for energy-efficient IoT application was able to improve the network lifetime compared to that of gossiping and FELGossiping. These results demonstrate the high level of flexibility of the proposed protocol with respect to network context and message priority.},
keywords = {Algorithms, Computational Intelligence, Data-driven learning for intelligent machine maintenance, intelligent systems},
pubstate = {published},
tppubtype = {article}
}
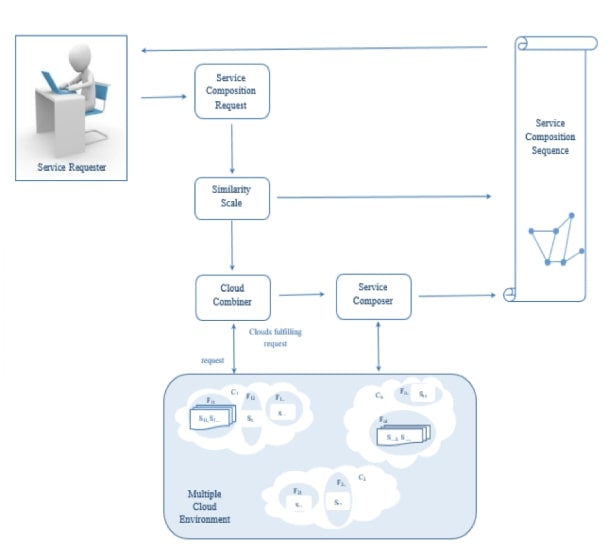
H Kurdi; F Ezzat; L Altoaimy; S H Ahmed; K Youcef-Toumi
MultiCuckoo: Multi-Cloud Service Composition Using a Cuckoo-Inspired Algorithm for the Internet of Things Applications Journal Article
In: IEEE Access, vol. 6, pp. 56737-56749, 2018, ISSN: 2169-3536.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Data-driven learning for intelligent machine maintenance, intelligent systems, Mechatronic Design, Simulation
@article{MRL_AFM_MultiCuckoo,
title = {MultiCuckoo: Multi-Cloud Service Composition Using a Cuckoo-Inspired Algorithm for the Internet of Things Applications},
author = {H Kurdi and F Ezzat and L Altoaimy and S H Ahmed and K Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/8476294?denied=},
doi = {10.1109/ACCESS.2018.2872744},
issn = {2169-3536},
year = {2018},
date = {2018-01-01},
journal = {IEEE Access},
volume = {6},
pages = {56737-56749},
publisher = {IEEE},
abstract = {Internet of things (IoT) applications aim to provide access to widespread interconnected networks of smart devices, services, and information. This can be achieved by integrating IoT and cloud computing (CC). By using cloud computing service composition (SC), multiple services from various providers can be combined to meet users' requirements. However, SC is known for its complexity and is classified as an NP-hard problem; such problems are usually approached using heuristics, such as bioinspired algorithms. This paper aims at developing a bio-inspired algorithm that mimics the behavior of cuckoo birds (which examine the nests of other birds to find eggs similar to their own) to find a composite service that fulfills a user's request in a multi-cloud environment (MCE). Previous work on cuckoo-inspired algorithms has generally utilized metaheuristics, which try to fit a “good”solution to a general optimization problem. In contrast, we propose a problem-dependent heuristic that considers the SC problem and its particularities in MCE. The proposed algorithm, MultiCuckoo, was thoroughly evaluated based on a well-controlled experimental framework that benchmarks the performance of the new algorithm to other outstanding SC algorithms, including the all clouds combination algorithm, base cloud combination algorithm, and combinatorial optimization algorithm for multiple cloud service Composition. The results show that our algorithm is more efficient in terms of decreasing the number of examined services, the composed clouds, and the running time in comparison to the benchmark algorithms.},
keywords = {Algorithms, Computational Intelligence, Data-driven learning for intelligent machine maintenance, intelligent systems, Mechatronic Design, Simulation},
pubstate = {published},
tppubtype = {article}
}
2017
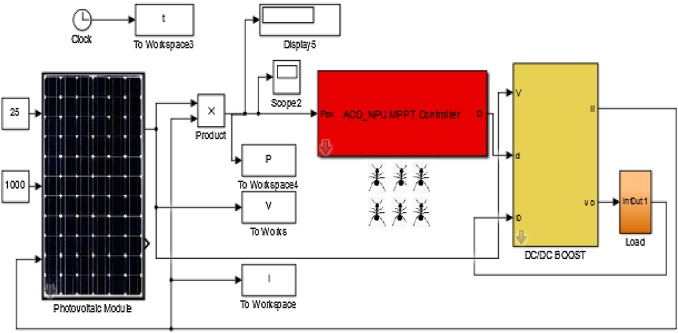
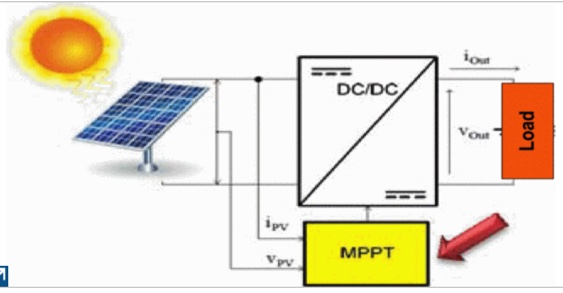
Sabrina Titri; Cherif Larbes; Kamal Youcef Toumi; Karima Benatchba
A new MPPT controller based on the Ant colony optimization algorithm for Photovoltaic systems under partial shading conditions Journal Article
In: Applied Soft Computing, vol. 58, pp. 465-479, 2017, ISSN: 1568-4946.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, intelligent systems, Mechatronic Design, Probabilistic neural networks for robust machine learning, Simulation
@article{MRL_AFM_MPPT_Controller_Ants,
title = {A new MPPT controller based on the Ant colony optimization algorithm for Photovoltaic systems under partial shading conditions},
author = {Sabrina Titri and Cherif Larbes and Kamal Youcef Toumi and Karima Benatchba},
url = {https://www.sciencedirect.com/science/article/pii/S1568494617302703},
doi = {https://doi.org/10.1016/j.asoc.2017.05.017},
issn = {1568-4946},
year = {2017},
date = {2017-09-01},
journal = {Applied Soft Computing},
volume = {58},
pages = {465-479},
abstract = {The Maximum Power Point Tracking controller (MPPT) is a key element in Photovoltaic systems (PV). It is used to maintain the PV operating point at its maximum under different temperatures and sunlight irradiations. The goal of a MPPT controller is to satisfy the following performances criteria: accuracy, precision, speed, robustness and handling the partial shading problem when climatic changes variations occur. To achieve this goal, several techniques have been proposed ranging from conventional methods to artificial intelligence and bio-inspired methods. Each technique has its own advantage and disadvantage. In this context, we propose in this paper, a new Bio- inspired MPPT controller based on the Ant colony Optimization algorithm with a New Pheromone Updating strategy (ACO_NPU MPPT) that saves the computation time and performs an excellent tracking capability with high accuracy, zero oscillations and high robustness. First, the different steps of the design of the proposed ACO_NPU MPPT controller are developed. Then, several tests are performed under standard conditions for the selection of the appropriate ACO_NPU parameters (number of ants, coefficients of evaporation, archive size, etc.). To evaluate the performances of the obtained ACO_NPU MPPT, in terms of its tracking speed, accuracy, stability and robustness, tests are carried out under slow and rapid variations of weather conditions (Irradiance and Temperature) and under different partial shading patterns. Moreover, to demonstrate the superiority and robustness of the proposed ACO_NPU_MPPT controller, the obtained results are analyzed and compared with others obtained from the Conventional Methods (P&O_MPPT) and the Soft Computing Methods with Artificial intelligence (ANN_MPPT, FLC_MPPT, ANFIS_MPPT, FL_GA_MPPT) and with the Bio Inspired methods (PSO) and (ACO) from the literature. The obtained results show that the proposed ACO_NPU MPPT controller gives the best performances under variables atmospheric conditions. In addition, it can easily track the global maximum power point (GMPP) under partial shading conditions.},
keywords = {Algorithms, Computational Intelligence, intelligent systems, Mechatronic Design, Probabilistic neural networks for robust machine learning, Simulation},
pubstate = {published},
tppubtype = {article}
}
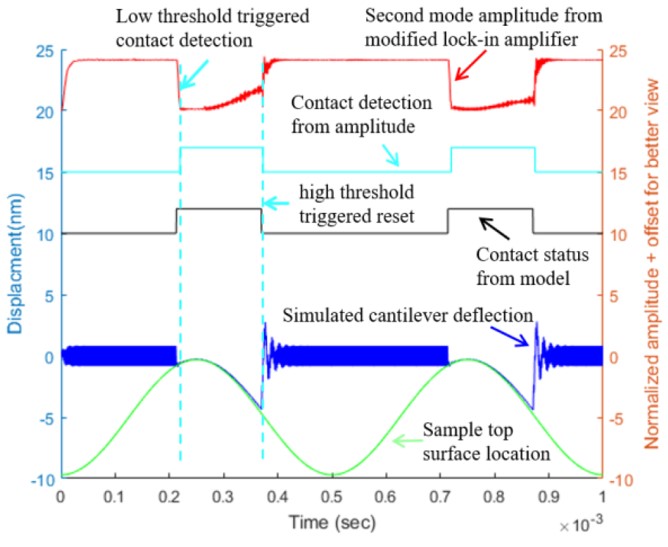
Fangzhou Xia; Iman Soltani Bozchalooi; Kamal Youcef-Toumi
Induced Vibration Contact Detection for Minimizing Cantilever Tip-Sample Interaction Forces in Jumping Mode Atomic Force Microscopy Proceedings Article
In: 2017 American Control Conference (ACC), pp. 4141–4146, IEEE IEEE, 2017, ISBN: 978-1-5090-5992-8.
Abstract | Links | BibTeX | Tags: Algorithms, Control Theory, Experimentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation
@inproceedings{MRL_AFM_IVCD,
title = {Induced Vibration Contact Detection for Minimizing Cantilever Tip-Sample Interaction Forces in Jumping Mode Atomic Force Microscopy},
author = {Fangzhou Xia and Iman Soltani Bozchalooi and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/7963591},
doi = {10.23919/ACC.2017.7963591},
isbn = {978-1-5090-5992-8},
year = {2017},
date = {2017-07-03},
booktitle = {2017 American Control Conference (ACC)},
pages = {4141--4146},
publisher = {IEEE},
organization = {IEEE},
abstract = {Minimizing tip-sample interaction force is crucial for the performance of atomic force microscopes when imaging delicate samples. Conventional methods based on jumping mode such as peak force tapping require a prescribed maximum interaction force to detect tip-sample contact. However, due to the presence of drag forces (in aqueous environments), noises and cantilever dynamics, the minimal detectable peak force can be large. This results in large tip-sample interaction forces and hence sample damage. To minimize this force, we propose a method based on induction of surface or probe vibrations to detect contact between cantilever probe tip and sample substrate. To illustrate the effectiveness of the method, we report experimental results for contact detection on a PS-LDPE-12M polymer sample. A topography tracking control algorithm based on the proposed contact detection scheme is also presented.},
keywords = {Algorithms, Control Theory, Experimentation, Mechatronic Design, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
2016
Bo Jiang; Aramazd Muzhikyan; Amro M Farid; Kamal Youcef-Toumi
Demand side management in power grid enterprise control: A comparison of industrial & social welfare approaches Journal Article
In: Applied Energy, vol. 187, pp. 833-846, 2016, ISSN: 0306-2619.
Abstract | Links | BibTeX | Tags: Algorithms, Control Theory, Experimentation, Robot operated modular fixtures, Robotics & Automation, Simulation
@article{MRL_AFM_Comparison_Industrial_Social_Welfare,
title = {Demand side management in power grid enterprise control: A comparison of industrial & social welfare approaches},
author = {Bo Jiang and Aramazd Muzhikyan and Amro M Farid and Kamal Youcef-Toumi},
url = {https://www.sciencedirect.com/science/article/pii/S0306261916315410},
doi = {https://doi.org/10.1016/j.apenergy.2016.10.096},
issn = {0306-2619},
year = {2016},
date = {2016-10-25},
journal = {Applied Energy},
volume = {187},
pages = {833-846},
publisher = {ScienceDirect},
abstract = {Despite the recognized importance of demand side management (DSM) for mitigating the impact of variable energy resources and reducing the system costs, the academic and industrial literature have taken divergent approaches to DSM implementation. The prequel to this paper has demonstrated that the netload baseline inflation – a feature particular to the industrial DSM unit commitment formulation – leads to higher and costlier day-ahead scheduling compared to the academic social welfare method. This paper now expands this analysis from a single optimization problem to the full power grid enterprise control with its multiple control layers at their associated time scales. These include unit commitment, economic dispatch and regulation services. It compares the two DSM formulations and quantifies the technical and economic impacts of industrial baseline errors in the day-ahead and real-time markets. The paper concludes that the presence of baseline errors – present only in the industrial model – leads to a cascade of additional system imbalances and costs as compared to the social welfare model. A baseline error introduced in the unit commitment problem will increase costs not just in the day-ahead market, but will also introduce a greater netload error residual in the real-time market causing additional cost and imbalances. These imbalances if left unmitigated degrade system reliability or otherwise require costly regulating reserves to achieve the same performance. An additional baseline error introduced in the economic dispatch further compounds this cascading effect with additional costs in the real-time market, amplified downstream imbalances, and further regulation capacity for its mitigation.},
keywords = {Algorithms, Control Theory, Experimentation, Robot operated modular fixtures, Robotics & Automation, Simulation},
pubstate = {published},
tppubtype = {article}
}
2015
Amro M Farid; Bo Jiang; Aramazd Muzhikyan; Kamal Youcef-Toumi
The need for holistic enterprise control assessment methods for the future electricity grid Journal Article
In: Renewable and Sustainable Energy Reviews, vol. 56, pp. 669-685, 2015, ISSN: 1364-0321.
Abstract | Links | BibTeX | Tags: Algorithms, Control Theory, Experimentation, intelligent systems, Modeling; sizing and control for smart grids, Physical System Modeling, Simulation
@article{MRL_AFM_Holistic_Assessment_Electricity_Grid,
title = {The need for holistic enterprise control assessment methods for the future electricity grid},
author = {Amro M Farid and Bo Jiang and Aramazd Muzhikyan and Kamal Youcef-Toumi},
url = {https://www.sciencedirect.com/science/article/pii/S1364032115012599},
doi = {https://doi.org/10.1016/j.rser.2015.11.007},
issn = {1364-0321},
year = {2015},
date = {2015-12-17},
journal = {Renewable and Sustainable Energy Reviews},
volume = {56},
pages = {669-685},
publisher = {elsevier},
abstract = {Recently, the academic and industrial literature has coalesced around an enhanced vision of the electric power grid that is responsive, dynamic, adaptive and flexible. As driven by decarbonization, reliability, transportation electrification, consumer participation and deregulation, this future grid will undergo technical, economic and regulatory changes to bring about the incorporation of renewable energy and incentivized demand side management and control. As a result, the power grid will experience fundamental changes in its physical system structure and behavior that will consequently require enhanced and integrated control, automation, and IT-driven management functions in what is called enterprise control. While these requirements will open a plethora of opportunities for new control technologies, many of these solutions are largely overlapping in function. Their overall contribution to holistic techno-economic control objectives and their underlying dynamic properties are less than clear. Piece-meal integration and a lack of coordinated assessment could bring about costly-overbuilt solutions or even worse unintended reliability consequences. This work, thus, reviews these existing trends in the power grid evolution. It then motivates the need for holistic methods of integrated assessment that manage the diversity of control solutions against their many competing objectives and contrasts these requirements to existing variable energy resource integration studies. The work concludes with a holistic framework for “enterprise control” assessment of the future power grid and suggests directions for future work.},
keywords = {Algorithms, Control Theory, Experimentation, intelligent systems, Modeling; sizing and control for smart grids, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {article}
}
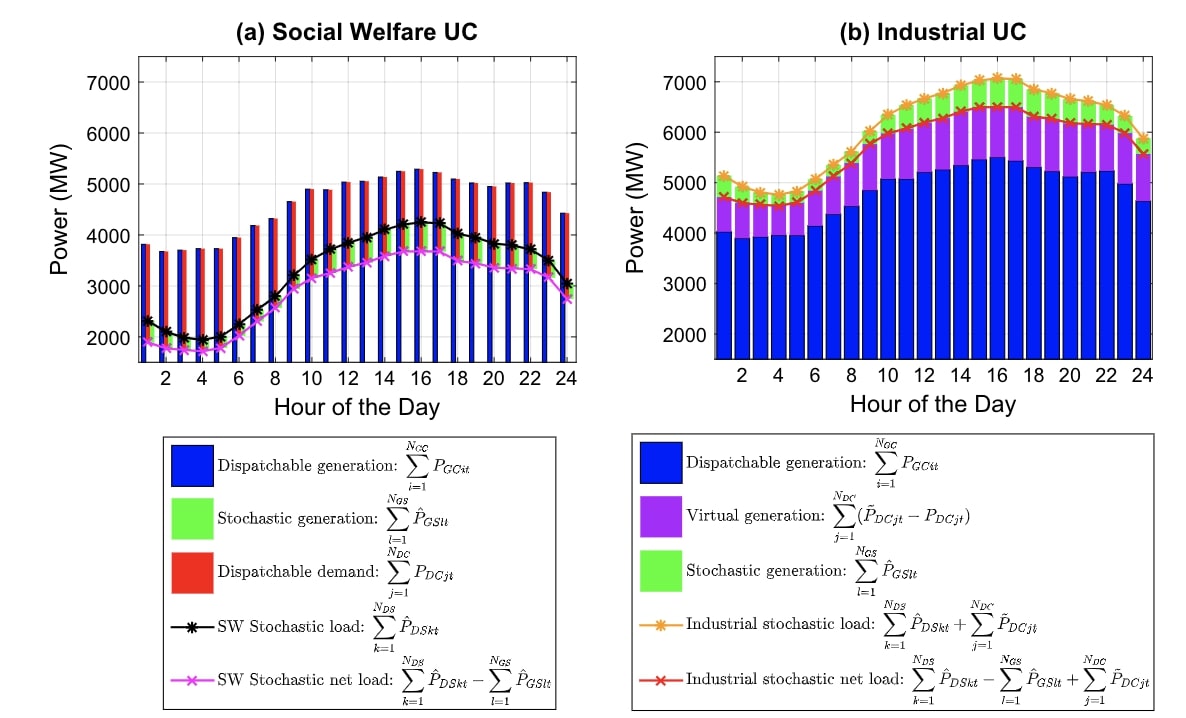
Bo Jiang; Amro M Farid; Kamal Youcef-Toumi
A comparison of day-ahead wholesale market: Social welfare vs industrial demand side management Proceedings Article
In: 2015 IEEE International Conference on Industrial Technology (ICIT), pp. 2742-2749, IEEE IEEE, 2015, ISBN: 978-1-4799-7800-7.
Abstract | Links | BibTeX | Tags: Algorithms, intelligent systems, Physical System Modeling, Simulation, Uncertainty estimation and calibration for modeling
@inproceedings{MRL_UEC_Welfare_vs_DSM,
title = {A comparison of day-ahead wholesale market: Social welfare vs industrial demand side management},
author = {Bo Jiang and Amro M Farid and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/abstract/document/7125502?section=abstract},
doi = {10.1109/ICIT.2015.7125502},
isbn = {978-1-4799-7800-7},
year = {2015},
date = {2015-06-18},
booktitle = {2015 IEEE International Conference on Industrial Technology (ICIT)},
pages = {2742-2749},
publisher = {IEEE},
organization = {IEEE},
abstract = {The intermittent nature of renewable energy has been discussed in the context of the operational challenges that it brings to electrical grid reliability. In contrast, Demand Side Management (DSM) with its ability to allow customers to adjust electricity consumption in response to market signals has often been recognized as an efficient way to mitigate the variable effects of renewable energy. However, the industrial & academic literature have taken divergent approaches to DSM implementation. Academic studies often implement demand side management on the basis of a social welfare maximization. Meanwhile, industrial implementations minimize total system costs where customers are compensated for load reductions from a predefined baseline of electricity consumption that would have occurred without DSM. This paper rigorously compares these two different approaches in a day-ahead wholesale market context using the same system configuration and mathematical formalism. The comparison showed that a proper reconciliation between the dispatchable demand utility function and the load reduction cost function lead to fundamentally the same stochastic netload mitigation and the two DSM models generate the same dispatch results under specific conditions. However, while the social welfare model uses a stochastic net load composed of two terms, the industrial DSM model uses a stochastic net load composed of three terms, and is thus more prone to error and more likely requires more control activity in subsequent layers of enterprise control.},
keywords = {Algorithms, intelligent systems, Physical System Modeling, Simulation, Uncertainty estimation and calibration for modeling},
pubstate = {published},
tppubtype = {inproceedings}
}
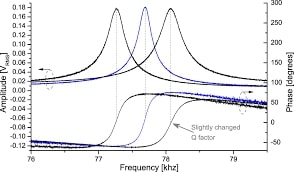
Andreas Schuh; Iman Soltani Bozchalooi; Ivo W Rangelow; Kamal Youcef-Toumi
Multi-eigenmode control for high material contrast in bimodal and higher harmonic atomic force microscopy Journal Article
In: Nanotechnology, vol. 26, no. 23, pp. 235706, 2015.
Abstract | Links | BibTeX | Tags: Algorithms, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation
@article{MRL_Multi_Eigenmode,
title = {Multi-eigenmode control for high material contrast in bimodal and higher harmonic atomic force microscopy},
author = {Andreas Schuh and Iman Soltani Bozchalooi and Ivo W Rangelow and Kamal Youcef-Toumi},
url = {https://doi.org/10.1088/0957-4484/26/23/235706},
doi = {10.1088/0957-4484/26/23/235706},
year = {2015},
date = {2015-05-01},
journal = {Nanotechnology},
volume = {26},
number = {23},
pages = {235706},
publisher = {IOP Publishing},
abstract = {High speed imaging and mapping of nanomechanical properties in atomic force microscopy (AFM) allows the observation and characterization of dynamic sample processes. Recent developments involve several cantilever frequencies in a multifrequency approach. One method actuates the first eigenmode for topography imaging and records the excited higher harmonics to map nanomechanical properties of the sample. To enhance the higher frequencies’ response two or more eigenmodes are actuated simultaneously, where the higher eigenmode(s) are used to quantify the nanomechanics. In this paper, we combine each imaging methodology with a novel control approach. It modifies the Q factor and resonance frequency of each eigenmode independently to enhance the force sensitivity and imaging bandwidth. It allows us to satisfy the different requirements for the first and higher eigenmode. The presented compensator is compatible with existing AFMs and can be simply attached with minimal modifications. Different samples are used to demonstrate the improvement in nanomechanical contrast mapping and imaging speed of tapping mode AFM in air. The experiments indicate most enhanced nanomechanical contrast with low Q factors of the first and high Q factors of the higher eigenmode. In this scenario, the cantilever topography imaging rate can also be easily improved by a factor of 10.},
keywords = {Algorithms, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {article}
}
Sabrina Titri; Cherif Larbes; Kamal Youcef-Toumi
Rapid prototyping of PVS into FPGA: From model based design to FPGA/ASICs implementation Proceedings Article
In: 2014 9th International Design and Test Symposium (IDT), pp. 162-167, IEEE IEEE, 2015, ISBN: 978-1-4799-8200-4.
Abstract | Links | BibTeX | Tags: Algorithms, intelligent systems, Modeling; sizing and control for smart grids, Physical System Modeling, Simulation
@inproceedings{MRL_SG_PVS_MPPT_Optimization,
title = {Rapid prototyping of PVS into FPGA: From model based design to FPGA/ASICs implementation},
author = {Sabrina Titri and Cherif Larbes and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/7038606},
doi = {10.1109/IDT.2014.7038606},
isbn = {978-1-4799-8200-4},
year = {2015},
date = {2015-02-15},
booktitle = {2014 9th International Design and Test Symposium (IDT)},
pages = {162-167},
publisher = {IEEE},
organization = {IEEE},
abstract = {A wide variety of maximum power point tracking (MPPT) algorithms for photovoltaic systems (PVS) have been proposed and developed. These MPPT algorithms vary in many aspects such as the selected criteria and techniques used. In this paper, we propose an effective design methodology for hardware implementation of PVS into FPGA/ASICs. To achieve our goal, we propose the application of the model based design at high level using the Matlab/Simulink which includes the HDL Coder Tool. The approach will assist the designer to develop and prototype in a relatively short time by eliminating time consuming and error prone due to manual coding. The proposed design methodology has been applied to the well know Pertub and Observe (P&O) MPPT controller. The Matlab/Simulink model of the P&O controller is optimized and converted to target, Hardware Description Language (HDL) code for FPGA/ASIC. The whole architecture of the P&O controller has been implemented on a Xilinx Spartan 3E prototyping board. We demonstrate that the generated RTL code can be easily mapped into FPGA/ASICs, which allow the rapid prototyping of PVS with more complex algorithms.},
keywords = {Algorithms, intelligent systems, Modeling; sizing and control for smart grids, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
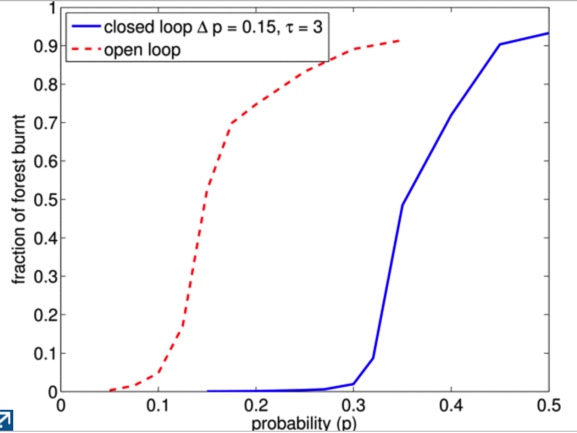
Amith Somanath; Sertac Karaman; Kamal Youcef-Toumi
Controlling stochastic growth processes on lattices: Wildfire management with robotic fire extinguishers Proceedings Article
In: 53rd IEEE Conference on Decision and Control, pp. 1432-1437, IEEE IEEE, 2015, ISBN: 978-1-4673-6090-6.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Computer vision for autonomous vehicle sensing, intelligent systems, Physical System Modeling, Simulation
@inproceedings{MRL_AVS_Robotic_Wildfire_Control,
title = {Controlling stochastic growth processes on lattices: Wildfire management with robotic fire extinguishers},
author = {Amith Somanath and Sertac Karaman and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/7039602},
doi = {10.1109/CDC.2014.7039602},
isbn = {978-1-4673-6090-6},
year = {2015},
date = {2015-02-15},
booktitle = {53rd IEEE Conference on Decision and Control},
pages = {1432-1437},
publisher = {IEEE},
organization = {IEEE},
abstract = {Forest fires continue to cause considerable social and economic damage. Fortunately, the emergence of new robotics technologies, including capable autonomous unmanned aerial vehicles, may help improve wildfire management in the near future. In this paper, we characterize the number of vehicles required to combat wildfires, using a percolation-theoretic analysis that originated in the mathematical physics community. We model the wildfire as a stochastic growth process on a square lattice, where the local growth probabilities depend on the presence of robotic fire-extinguishing vehicles. We develop two control policies: First treats only a fraction of burning nodes at a given time, and the second treats burning nodes only at finite time intervals. We characterize the conditions under which these policies can stabilize a wildfire, i.e., ensure the fire stops eventually almost surely. We also provide computational results which demonstrate our theoretical analysis.},
keywords = {Algorithms, Computational Intelligence, Computer vision for autonomous vehicle sensing, intelligent systems, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
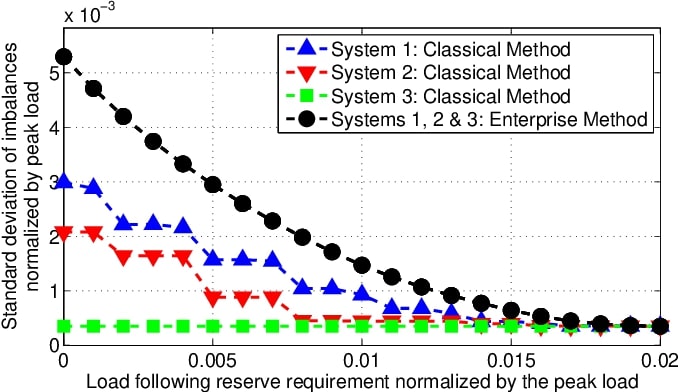
A Muzhikyan; A M Farid; K Youcef-Toumi
An Enterprise Control Assessment Method for Variable Energy Resource-Induced Power System Imbalances—Part II: Parametric Sensitivity Analysis Journal Article
In: IEEE Transactions on Industrial Electronics, vol. 62, no. 4, pp. 2459-2467, 2015, ISSN: 1557-9948.
Abstract | Links | BibTeX | Tags: Algorithms, Control Theory, intelligent systems, Modeling, Simulation, sizing and control of smart grids
@article{MRL_AFM_Enterprise_Control_Assessment,
title = {An Enterprise Control Assessment Method for Variable Energy Resource-Induced Power System Imbalances—Part II: Parametric Sensitivity Analysis},
author = {A Muzhikyan and A M Farid and K Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/7018074?denied=},
doi = {10.1109/TIE.2015.2395380},
issn = {1557-9948},
year = {2015},
date = {2015-01-22},
journal = {IEEE Transactions on Industrial Electronics},
volume = {62},
number = {4},
pages = {2459-2467},
publisher = {IEEE},
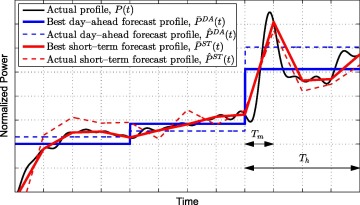
abstract = {In recent years, renewable energy has developed to address energy security and climate change drivers. However, as energy resources, they possess a variable and uncertain nature that significantly complicates grid balancing operations. As a result, an extensive academic and industrial literature has developed to determine how much such variable energy resources (VERs) may be integrated and how to best mitigate their impacts. While certainly insightful with the context of their application, many integration studies have methodological limitations because they are case specific, address a single control function of the power grid balancing operations, and are often not validated by simulation. The prequel to this paper presented a holistic method for the assessment of power grid imbalances induced by VERs based upon the concept of enterprise control. This paper now systematically studies these power grid imbalances in terms of five independent variables: 1) day-ahead market time step; 2) real-time market time step; 3) VER normalized variability; 4) normalized day-ahead VER forecast error; and 5) normalized short-term VER forecast error. The systematic study elucidates the impacts of these variables and provides significant insights as to how planners should address these independent variables in the future.},
keywords = {Algorithms, Control Theory, intelligent systems, Modeling, Simulation, sizing and control of smart grids},
pubstate = {published},
tppubtype = {article}
}
2014
William Lubega; Apoorva Santhosh; Amro M Farid; Kamal Youcef-Toumi
An Integrated Energy and Water Market for the Supply Side of the Energy-Water Nexus in the Engineered Infrastructure Proceedings Article
In: ASME 2014 Power Conference, 2014, ISBN: 978-0-7918-4609-4.
Abstract | Links | BibTeX | Tags: Algorithms, intelligent systems, Modeling; sizing and control for smart grids, Physical System Modeling, Simulation
@inproceedings{MRL_SG_Integrated_Electric_Water,
title = {An Integrated Energy and Water Market for the Supply Side of the Energy-Water Nexus in the Engineered Infrastructure},
author = {William Lubega and Apoorva Santhosh and Amro M Farid and Kamal Youcef-Toumi},
url = {https://asmedigitalcollection.asme.org/POWER/proceedings/POWER2014/46094/V002T10A003/282270},
doi = {10.1115/POWER2014-32075},
isbn = {978-0-7918-4609-4},
year = {2014},
date = {2014-11-19},
booktitle = {ASME 2014 Power Conference},
abstract = {In regions that utilize thermal desalination as part of their water supply portfolio, the cogeneration of water and power in cogeneration desalination plants couples the supply sides of the electricity and water grids. For a fixed plant design, there is a limited range of ratios of generated electric power to produced water at any given time. Due to this coupling, electricity and water require co-optimization. In an environment in which electricity supply is determined by deregulated wholesale markets, this need for co-optimization suggests a need for integrated electricity and water markets. In this market, independent power producers, independent water producers and independent cogeneration plants would submit bids to satisfy demand over a time horizon to a clearing mechanism, indicating relevant physical constraints. The mechanism would then optimize supply of both electricity and water over the time horizon of interest. Recently, a simultaneous co-optimization method has been contributed for the economic dispatch of networks that include water, power and cogeneration facilities in such an integrated market. This paper builds upon this foundation with the introduction of the corresponding unit commitment problem.},
keywords = {Algorithms, intelligent systems, Modeling; sizing and control for smart grids, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
Dimitris Chatzigeorgiou; Kamal Youcef-Toumi; Rached Ben-Mansour
Detection estimation algorithms for in-pipe leak detection Proceedings Article
In: 2014 American Control Conference, pp. 5508-5514, 2014, ISBN: 978-1-4799-3274-0.
Abstract | Links | BibTeX | Tags: Algorithms, Control Theory, Experimentation, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics and Automation, Simulation
@inproceedings{MRL_WDP_Estimation_Algorithms,
title = {Detection estimation algorithms for in-pipe leak detection},
author = {Dimitris Chatzigeorgiou and Kamal Youcef-Toumi and Rached Ben-Mansour},
url = {https://ieeexplore.ieee.org/document/6859203},
doi = {10.1109/ACC.2014.6859203},
isbn = {978-1-4799-3274-0},
year = {2014},
date = {2014-07-21},
booktitle = {2014 American Control Conference},
pages = {5508-5514},
abstract = {Leakage is the most important factor for unaccounted losses in any pipe network around the world. However, most state of the art leak detection systems have limited applicability, lack in reliability and/or depend on user experience for data interpretation. In this paper we present a new, autonomous, in-pipe, leak detection system. The detection principle is based on the presence of a pressure gradient in the neighborhood of a leak in a pressurized pipe. This phenomenon is translated into force measurements via a carefully designed and instrumented mechanical embodiment (MIT Leak Detector). We then introduce a detection and estimation scheme. The latter one allows not only for the reliable detection, but also for the estimation of the incidence angle and the magnitude of the forces that are associated with the leak. Finally, a prototype is built and experiments in pipes are conducted to demonstrate the efficacy of the proposed methodology.},
keywords = {Algorithms, Control Theory, Experimentation, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics and Automation, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
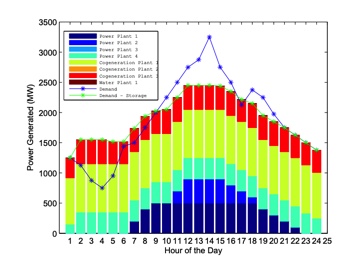
Apoorva Santhosh; Amro Farid; Kamal Youcef-Toumi
Real-time economic dispatch for the supply side of the energy-water nexus Journal Article
In: Applied Energy, vol. 122, pp. 42–52, 2014.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Control Theory, Data-driven learning for intelligent machine maintenance, intelligent systems, Simulation
@article{MRL_AFM_Economic_Energy_Water_Nexus,
title = {Real-time economic dispatch for the supply side of the energy-water nexus},
author = {Apoorva Santhosh and Amro Farid and Kamal Youcef-Toumi},
doi = {10.1016/j.apenergy.2014.01.062},
year = {2014},
date = {2014-06-01},
journal = {Applied Energy},
volume = {122},
pages = {42–52},
publisher = {researchgate},
abstract = {Clean energy and water are two essential resources that any society must securely deliver. Their usage raises sustainability issues and questions of nations’ resilience in face of global changes and mega-trends such as population growth, global climate change, and economic growth. Traditionally, the infrastructure systems that deliver these precious commodities, the water distribution and power transmission networks are thought of as separate, uncoupled systems. However, in reality, they are very much coupled in what is commonly known as the energy-water nexus. Although this subject has recently caught the attention of numerous policy and regulatory agencies, rarely is it holistically addressed in terms of an integrated engineering system for its management, planning, and regulation as an interdisciplinary concern. This work specifically fills this gap by addressing the supply side of this integrated engineering system. Specifically, it develops the multi-plant real-time simultaneous economic dispatch of power and water. While significant background literature has addressed traditional power dispatch, and the emerging co-dispatch of power and heat, as of now there does not exist a parameterized model for the optimized dispatch of power and water for multiple power, water, and coproduction facilities. The work presents such a model where production costs are minimized subject to capacity, demand and process constraints. It is demonstrated on an illustrative example of modest size. Interesting results were observed suggesting that the coproduction minimum capacity limits and process constraints can lead to scenarios where cheaper single product plants can be crowded out of the dispatch. The program provides a systematic method of achieving optimal results and can serve as a basis for set-points upon which individual plants can implement their optimal control. In so doing, it makes a supply-side contribution to the ongoing grand-challenge of improving the sustainability of the energy-water nexus.},
keywords = {Algorithms, Computational Intelligence, Control Theory, Data-driven learning for intelligent machine maintenance, intelligent systems, Simulation},
pubstate = {published},
tppubtype = {article}
}
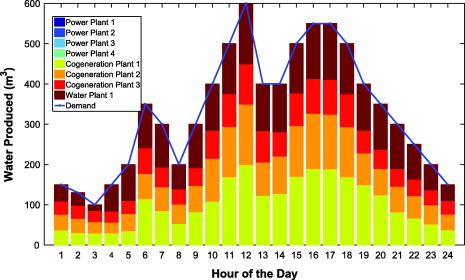
Apoorva Santhosh; Amro M Farid; Kamal Youcef-Toumi
Optimal network flow for the supply side of the energy-water nexus Proceedings Article
In: 2013 IEEE International Workshop on Inteligent Energy Systems (IWIES), pp. 155-160, IEEE IEEE, 2014, ISBN: 978-1-4799-1135-6.
Abstract | Links | BibTeX | Tags: Algorithms, intelligent systems, Modeling; sizing and control for smart grids, Physical System Modeling, Simulation
@inproceedings{MRL_SG_Water_Plant_Sustainability,
title = {Optimal network flow for the supply side of the energy-water nexus},
author = {Apoorva Santhosh and Amro M Farid and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/6698578},
doi = {10.1109/IWIES.2013.6698578},
isbn = {978-1-4799-1135-6},
year = {2014},
date = {2014-01-06},
booktitle = {2013 IEEE International Workshop on Inteligent Energy Systems (IWIES)},
pages = {155-160},
publisher = {IEEE},
organization = {IEEE},
abstract = {Clean energy and water are two essential resources that any society must securely deliver. Their usage raises sustainability issues and questions of nations' resilience in face of global changes and mega-trends such as population growth, global climate change, and economic growth. Recently, attention has been paid to the infrastructure systems for water distribution and power transmission and the coupling between them in what is commonly known as the energy-water nexus. Although numerous policy and regulatory agencies have addressed the subject, rarely is it holistically addressed in terms of an integrated engineering system for its management, planning, and regulation as an interdisciplinary concern. This work specifically addresses the supply side of this integrated engineering system framework. It takes as its subject the real-time optimal flows in power and water networks. Significant background literature is brought to bear on this topic including the emerging co-dispatch of power and water and the more well established optimizations for power and water networks individually. The work presents a mathematical optimization program for the co-dispatch of the two commodities for three types of plants: power generation plants, co-production facilities and water production plants. Production costs are minimized subject to capacity, demand and transmission constraints and demonstrated on an illustrative example of modest size developed from standard test cases. On a practical basis, the program can be applied directly in middle eastern countries where water and power distribution are typically under the responsibility of a single utility. Furthermore, the program provides a systematic method of achieving optimal results and can serve as a basis for set-points upon which individual plants can implement their optimal control. In so doing, it makes a supply-side contribution to the ongoing grand-challenge of improving the sustainability of the energy-water nexus.},
keywords = {Algorithms, intelligent systems, Modeling; sizing and control for smart grids, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
2013
Apoorva Santhosh; Amro M Farid; Kamal Youcef-Toumi
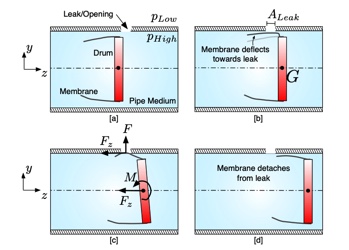
Design and Evaluation of an In-Pipe Leak Detection Sensing Technique Based on Force Transduction Proceedings Article
In: ASME 2012 International Mechanical Engineering Congress and Exposition, IEEE IEEE, 2013, ISBN: 978-0-7918-4520-2.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Force_Transduction_Leaking,
title = {Design and Evaluation of an In-Pipe Leak Detection Sensing Technique Based on Force Transduction},
author = {Apoorva Santhosh and Amro M Farid and Kamal Youcef-Toumi},
url = {https://asmedigitalcollection.asme.org/IMECE/proceedings/IMECE2012/45202/489/254570},
doi = {10.1115/IMECE2012-87493},
isbn = {978-0-7918-4520-2},
year = {2013},
date = {2013-10-08},
booktitle = {ASME 2012 International Mechanical Engineering Congress and Exposition},
publisher = {IEEE},
organization = {IEEE},
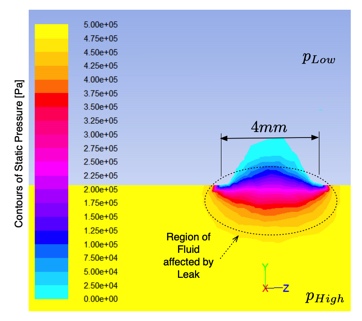
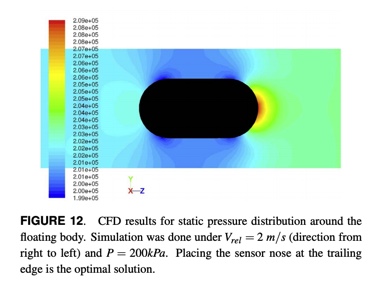
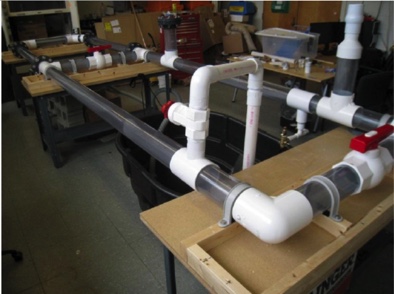
abstract = {Leakage is the major factor for unaccounted fluid losses in almost every pipe network. In most cases the deleterious effects associated with the occurrence of leaks may present serious economical and health problems and therefore, leaks must be quickly detected, located and repaired. The problem of leakage becomes even more serious when it is concerned with the vital supply of fresh water to the community. Leaking water pipelines can develop large health threats to people mostly because of the infiltration of contaminants into the water network. Such possibilities of environmental health disasters have spurred research into the development of methods for pipeline leakage detection. Most state of the art leak detection techniques have limited applicability, while some of them are not reliable enough and sometimes depend on user experience. Our goal in this work is to design and develop a reliable leak detection sensing system. The proposed technology utilizes the highly localized pressure gradient in the vicinity of a small opening due to leakage in a pressurized pipeline. In this paper we study this local phenomenon in detail and try to understand it with the help of numerical simulations in leaking pipelines (CFD studies). Finally a new system for leak detection is presented. The proposed system is designed in order to reduce the number of sensing elements required for detection. The main concept and detailed design are laid out. A prototype is fabricated and presented as a proof of concept. The prototype is tested in a simple experimental setup with artificial leakages for experimental evaluation. The sensing technique discussed in this work can be deployed in water, oil and gas pipelines without significant changes in the design, since the concepts remain the same in all cases.},
keywords = {Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
Aramazd Muzhikyan; Amro M Farid; Kamal Youcef-Toumi
Variable energy resource induced power system imbalances: Mitigation by increased system flexibility, spinning reserves and regulation Proceedings Article
In: 2013 1st IEEE Conference on Technologies for Sustainability (SusTech), pp. 15-22, IEEE IEEE, 2013, ISBN: 978-1-4673-4630-6.
Abstract | Links | BibTeX | Tags: Algorithms, intelligent systems, Modeling; sizing and control for smart grids, Physical System Modeling, Simulation
@inproceedings{MRL_SG_Generalized_Reserve_Analysis,
title = {Variable energy resource induced power system imbalances: Mitigation by increased system flexibility, spinning reserves and regulation},
author = {Aramazd Muzhikyan and Amro M Farid and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/6617292},
doi = {10.1109/SusTech.2013.6617292},
isbn = {978-1-4673-4630-6},
year = {2013},
date = {2013-10-03},
booktitle = {2013 1st IEEE Conference on Technologies for Sustainability (SusTech)},
pages = {15-22},
publisher = {IEEE},
organization = {IEEE},
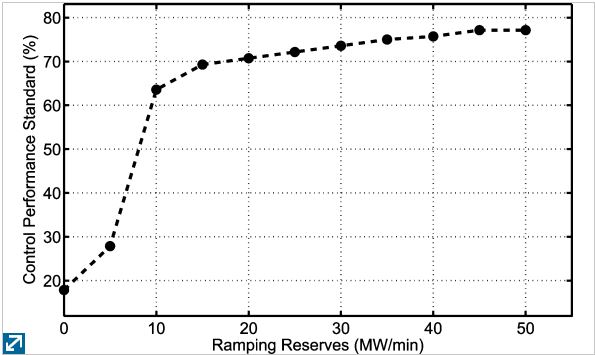
abstract = {The impact of variable energy resources (VER) on power system reserve and regulation requirements has been a subject of extensive research in recent years. However, the conclusions about the scale of the impact diverge, since most of the results are obtained from specific case studies. This paper proposes a generalized approach to the assessment of power system reserve and regulation requirements. It uses a power system enterprise model that consists of three layers: the physical grid, resource scheduling and balancing operations. Resource scheduling is modeled as a security-constrained unit-commitment (SCUC) problem. The balancing layer consists of three components, namely the regulation service, the real-time market and operator manual actions. The real-time market is implemented as a security-constrained economic dispatch (SCED) problem. The IEEE RTS96 reliability test system is used for the physical layer. Three main resources contributing to the balancing of power system are studied: reserves, regulation and generator ramping rates. Their impacts on power system imbalance mitigation in the presence of VER is studied.},
keywords = {Algorithms, intelligent systems, Modeling; sizing and control for smart grids, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
2012
Atia E Khalifa; Rached Ben-Mansour; Kamal Youcef-Toumi; Changrak Choi
Characterization of In-Pipe Acoustic Wave for Water Leak Detection Proceedings Article
In: ASME 2011 International Mechanical Engineering Congress and Exposition, pp. 995-1000, ACC ACC, 2012, ISBN: 978-0-7918-5494-5.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Acoustic_Wave_Pipe_Leakage,
title = {Characterization of In-Pipe Acoustic Wave for Water Leak Detection},
author = {Atia E Khalifa and Rached Ben-Mansour and Kamal Youcef-Toumi and Changrak Choi},
url = {https://asmedigitalcollection.asme.org/IMECE/proceedings/IMECE2011/54945/995/355499},
doi = {10.1115/IMECE2011-62333},
isbn = {978-0-7918-5494-5},
year = {2012},
date = {2012-08-01},
booktitle = {ASME 2011 International Mechanical Engineering Congress and Exposition},
pages = {995-1000},
publisher = {ACC},
organization = {ACC},
abstract = {This paper presents experimental observations on the characteristics of the acoustic signal propagation and attenuation inside water-filled pipes. An acoustic source (exciter) is mounted on the internal pipe wall, at a fixed location, and produces a tonal sound to simulate a leak noise with controlled frequency and amplitude, under different flow conditions. A hydrophone is aligned with the pipe centerline and can be re-positioned to capture the acoustic signal at different locations. Results showed that the wave attenuation depends on the source frequency and the line pressure. High frequency signals get attenuated more with increasing distance from the source. The optimum location to place the hydrophone for capturing the acoustic signal is not at the vicinity of source location. The optimum location also depends on the frequency and line pressure. It was also observed that the attenuation of the acoustic waves is higher in more flexible pipes like PVC ones.},
keywords = {Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
Dimitris M Chatzigeorgiou; Atia E Khalifa; Kamal Youcef-Toumi; Rached Ben-Mansour
An In-Pipe Leak Detection Sensor: Sensing Capabilities and Evaluation Proceedings Article
In: ASME 2011 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, pp. 481-489, ACC ACC, 2012, ISBN: 978-0-7918-5480-8.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Leak_Capability_Sensor,
title = {An In-Pipe Leak Detection Sensor: Sensing Capabilities and Evaluation},
author = {Dimitris M Chatzigeorgiou and Atia E Khalifa and Kamal Youcef-Toumi and Rached Ben-Mansour},
url = {https://asmedigitalcollection.asme.org/IDETC-CIE/proceedings/IDETC-CIE2011/54808/481/351961},
doi = {10.1115/DETC2011-48411},
isbn = {978-0-7918-5480-8},
year = {2012},
date = {2012-06-12},
booktitle = {ASME 2011 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference},
pages = {481-489},
publisher = {ACC},
organization = {ACC},
abstract = {In most cases the deleterious effects associated with the occurrence of leak may present serious problems and therefore leaks must be quickly detected, located and repaired. The problem of leakage becomes even more serious when it is concerned with the vital supply of fresh water to the community. In addition to waste of resources, contaminants may infiltrate into the water supply. The possibility of environmental health disasters due to delay in detection of water pipeline leaks has spurred research into the development of methods for pipeline leak and contamination detection. Leaks in water pipes create acoustic emissions, which can be sensed to identify and localize leaks. Leak noise correlators and listening devices have been reported in the literature as successful approaches to leak detection but they have practical limitations in terms of cost, sensitivity, reliability and scalability. To overcome those limitations the development of an in-pipe traveling leak detection system is proposed. The development of such a system requires a clear understanding of acoustic signals generated from leaks and the study of the variation of those signals with different pipe loading conditions, leak sizes and surrounding media. This paper discusses those signals and evaluates the merits of an in-pipe-floating sensor.},
keywords = {Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
Dimitris M Chatzigeorgiou; Kamal Youcef-Toumi; Atia E Khalifa; Rached Ben-Mansour
Analysis and Design of an In-Pipe System for Water Leak Detection Proceedings Article
In: ASME 2011 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, pp. 1007-1016, ASME ASME, 2012, ISBN: 978-0-7918-5482-2.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Design_Water_Leak_Detection,
title = {Analysis and Design of an In-Pipe System for Water Leak Detection},
author = {Dimitris M Chatzigeorgiou and Kamal Youcef-Toumi and Atia E Khalifa and Rached Ben-Mansour},
url = {https://asmedigitalcollection.asme.org/IDETC-CIE/proceedings/IDETC-CIE2011/54822/1007/353866},
doi = {10.1115/DETC2011-48395},
isbn = {978-0-7918-5482-2},
year = {2012},
date = {2012-06-12},
booktitle = {ASME 2011 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference},
pages = {1007-1016},
publisher = {ASME},
organization = {ASME},
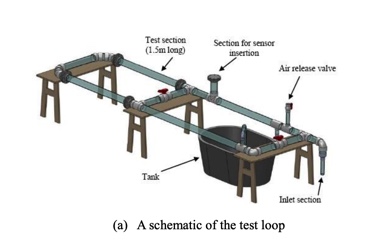
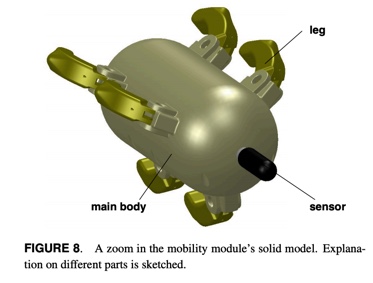
abstract = {In most cases the deleterious effects associated with the occurrence of leaks may present serious problems and therefore, leaks must be quickly detected, located and repaired. The problem of leakage becomes even more serious when it is concerned with the vital supply of fresh water to the community. In addition to waste of resources, contaminants may infiltrate into the water supply. The possibility of environmental health disasters due to delay in detection of water pipeline leaks has spurred research into the development of methods for pipeline leak and contamination detection. Leaking in water networks has been a very significant problem worldwide, especially in developing countries, where water is sparse. Many different techniques have been developed to detect leaks, either from the inside or from the outside of the pipe; each one of them with their advantages, complexities but also limitations. To overcome those limitations we focus our work on the development of an in-pipe-floating sensor. The present paper discusses the design considerations of a novel autonomous system for in-pipe water leak detection. The system is carefully designed to be minimally invasive to the flow within the pipe and thus not to affect the delicate leak signal. One of its characteristics is the controllable motion inside the pipe. The system is capable of pinpointing leaks in pipes while operating in real network conditions, i.e. pressurized pipes and high water flow rates, which are major challenges.},
keywords = {Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
2010
Dimitris M Chatzigeorgiou; Sumeet Kumar; Atia E Khalifa; Ajay Deshpande; Kamal Youcef-Toumi; Sanjay Sarma; Rached Ben-Mansour
In-pipe Acoustic Characterization of Leak Signals in Plastic Water-filled Pipes Proceedings Article
In: AWWA Annual Conference and Exposition (ACE) 2010, AWWA AWWA, 2010.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Acoustic_Leak_Signals,
title = {In-pipe Acoustic Characterization of Leak Signals in Plastic Water-filled Pipes},
author = {Dimitris M Chatzigeorgiou and Sumeet Kumar and Atia E Khalifa and Ajay Deshpande and Kamal Youcef-Toumi and Sanjay Sarma and Rached Ben-Mansour},
url = {https://www.researchgate.net/publication/277303127_In-pipe_Acoustic_Characterization_of_Leak_Signals_in_Plastic_Water-filled_Pipes},
year = {2010},
date = {2010-01-01},
booktitle = {AWWA Annual Conference and Exposition (ACE) 2010},
publisher = {AWWA},
organization = {AWWA},
abstract = {Acoustic emissions can be sensed to identify and localize leaks in water pipes. Leak noise correlators and listening devices have been reported in literature as successful approaches to leak detection but they have practical limitations in terms of cost, sensitivity, reliability and scalability. A possible efficient solution is the development of an in-pipe traveling leak detection system. It has been reported that in-pipe sensing is more accurate and efficient since the sensing element can be very close to the sound source. Currently in-pipe approaches are limited to large leaks and larger diameter pipes. Development of such a system requires clear understanding of acoustic signals generated from leaks and their variation with different pipe loading conditions, leak sizes and surrounding media. This paper discusses the acoustic characterization of leak signals in controlled environments. A lab experimental setup was designed and built in which measurements were taken from inside 4 inch PVC water pipes using a hydrophone. Signals were collected for a wide range of conditions: different pressures and leak flow rates to better understand the leak signal signatures. Experiments were conducted with different pipe connecting elements like valves and junctions, and different external conditions such as pipes placed in water, air and soil. Signals were collected at various distances from the leak location (upstream and downstream) to understand the opportunities of spatial cross-correlation techniques in localizing leaks and the effect of sensor position on the signal. Characterizations of different datasets are presented in frequency domain. The implications of acoustic characterization on the design of algorithms for leak detection are discussed and a simple algorithm to decide whether or not a leak is present near the sensor location is proposed, based on signal power calculations. The characterization gives insights, which will pave ways for the development of smart, autonomous pipe-traversing systems capable of detecting and localizing leaks on a city level water distribution network.},
keywords = {Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
1979
Aramazd Muzhikyan; Amro M Farid; Kamal Youcef-Toumi
An a priori analytical method for the determination of operating reserve requirements Journal Article
In: International Journal of Electrical Power & Energy Systems, vol. 86, pp. 1-17, 1979, ISSN: 0142-0615.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, intelligent systems, Physical System Modeling, Simulation, Uncertainty estimation and calibration for modeling
@article{MRL_AFM_Priori_Operating_Requirements,
title = {An a priori analytical method for the determination of operating reserve requirements},
author = {Aramazd Muzhikyan and Amro M Farid and Kamal Youcef-Toumi},
url = {https://www.sciencedirect.com/science/article/pii/S0142061515300089},
doi = {https://doi.org/10.1016/j.ijepes.2016.09.005},
issn = {0142-0615},
year = {1979},
date = {1979-04-01},
journal = {International Journal of Electrical Power & Energy Systems},
volume = {86},
pages = {1-17},
publisher = {ScienceDirect},
abstract = {Power balance is one of the key requirements for reliable power system operation. However, factors, such as net load variability and forecast errors, impose practical limitations on matching the scheduled generation and the real-time demand. Normally, potential power imbalances are mitigated by scheduling additional generation capacity called operating reserves. However, reserves are a costly commodity and their requirements should be accurately assessed to avoid unnecessary expense. Currently, the reserve requirements are determined using a posteriori methods based upon operator’s experience and established assumptions. While these assumptions are made out of a level of engineering practicality, they may not be formally true given the numerical evidence. This paper presents a formal mathematical framework for the a priori determination of three types of operating reserve requirements, namely load following, ramping and regulation. Validation of the methodology is performed by a set of extensive simulations that model the power system operations for different scenarios. This methodology is used to study the sensitivity of each type of reserve requirement to the net load and power system parameters.},
keywords = {Algorithms, Computational Intelligence, intelligent systems, Physical System Modeling, Simulation, Uncertainty estimation and calibration for modeling},
pubstate = {published},
tppubtype = {article}
}