
Mechatronics Research Lab Publications
List still being populated due to webpage maintenance
2012
Brett Shapiro; Nergis Mavalvala; Kamal Youcef-Toumi
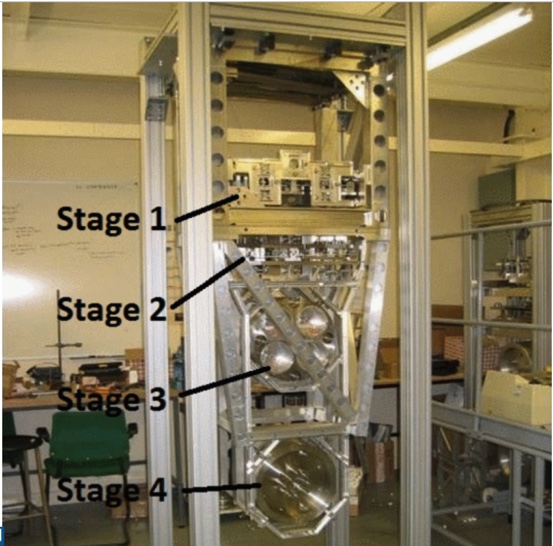
Modal damping of a quadruple pendulum for advanced gravitational wave detectors Proceedings Article
In: 2012 American Control Conference (ACC), pp. 1017-1022, ACC ACC, 2012, ISBN: 978-1-4577-1096-4.
Abstract | Links | BibTeX | Tags: Control Theory, Data-driven learning for intelligent machine maintanence, Experimentation, Fabrication, intelligent systems, Physical System Modeling, Simulation
@inproceedings{MRL_DDL_Gravity_Wave_Detectors,
title = {Modal damping of a quadruple pendulum for advanced gravitational wave detectors},
author = {Brett Shapiro and Nergis Mavalvala and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/6315185},
doi = {10.1109/ACC.2012.6315185},
isbn = {978-1-4577-1096-4},
year = {2012},
date = {2012-10-02},
booktitle = {2012 American Control Conference (ACC)},
pages = {1017-1022},
publisher = {ACC},
organization = {ACC},
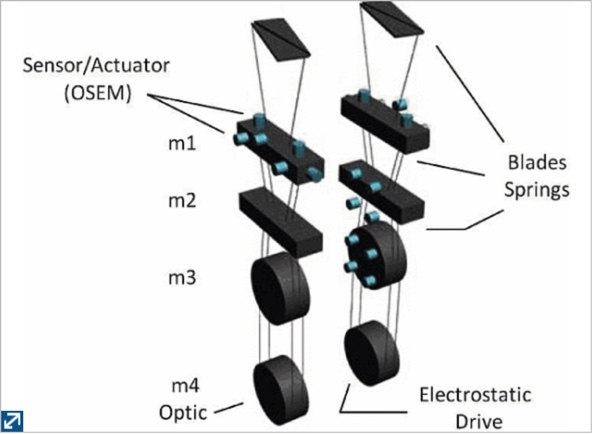
abstract = {The Laser Interferometer Gravitational-Wave Observatory (LIGO) has begun a major set of upgrades to reach a sensitivity better than 10-19 m/√(Hz) in the 10Hz to 10 kHz frequency band. This advance is expected to bring gravitational wave observations of relativistic astrophysical events such as black hole mergers and supernovae into the realm of regular astronomy. These upgrades require complex vibration isolation systems to better decouple the test masses from ground disturbances. These high performance systems require correspondingly more complex and aggressive active control loops to meet the increased demand in instrument sensitivity. This paper applies a modal damping technique with state estimation to optimize the trade-off between disturbance rejection and sensor noise amplification. The state estimator design applies a customized cost function around the Linear Quadratic Regulator (LQR) algorithm.},
keywords = {Control Theory, Data-driven learning for intelligent machine maintanence, Experimentation, Fabrication, intelligent systems, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
Soltani I Bozchalooi; Kamal Youcef-Toumi; D J Burns; Georg E Fantner
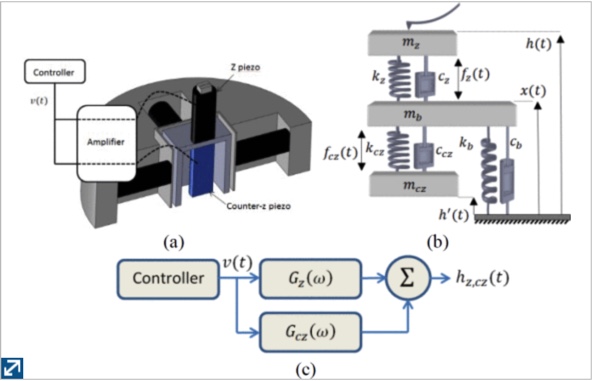
A vibration suppression approach to high-speed atomic force microscopy Proceedings Article
In: 2012 American Control Conference (ACC), pp. 3797-3802, ACC ACC, 2012, ISBN: 978-1-4577-1096-4.
Abstract | Links | BibTeX | Tags: Control Theory, Experimentation, Instrumentation, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation, Visualization
@inproceedings{MRL_AFM_Vibration_Suppression,
title = {A vibration suppression approach to high-speed atomic force microscopy},
author = {Soltani I Bozchalooi and Kamal Youcef-Toumi and D J Burns and Georg E Fantner},
url = {https://ieeexplore.ieee.org/document/6315281},
doi = {10.1109/ACC.2012.6315281},
isbn = {978-1-4577-1096-4},
year = {2012},
date = {2012-10-02},
booktitle = {2012 American Control Conference (ACC)},
pages = {3797-3802},
publisher = {ACC},
organization = {ACC},
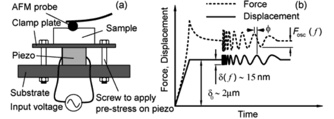
abstract = {The possibility of many new applications and novel scientific observations can be provided by efficient and reliable high-speed atomic force microscopy techniques. However, the reliability of the AFM images decreases significantly as the imaging speed is increased to levels required for the targeted real-time observation of nano-scale phenomenon. One of the main reasons behind this limitation is the excitation of the AFM dynamics at high scan speeds. In this research we propose a piezo based, feedforward controlled, counter actuation mechanism to compensate for the excited out-of-plane scanner dynamics. For this purpose the AFM controller output is properly filtered via a linear compensator and then applied to a counter actuating piezo. The information required for compensator design is extracted from the cantilever deflection signal hence, eliminating the need for any additional sensors. The proposed approach is implemented and experimentally evaluated on the dynamic response of a custom made AFM. It is further assessed by comparing the imaging performance of the AFM with and without the application of the proposed technique and in comparison with the conventional counterbalancing methodology. The experimental results substantiate the effectiveness of the method in significantly improving the imaging performance of AFM at high scan speeds.},
keywords = {Control Theory, Experimentation, Instrumentation, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
Atia E Khalifa; Rached Ben-Mansour; Kamal Youcef-Toumi; Changrak Choi
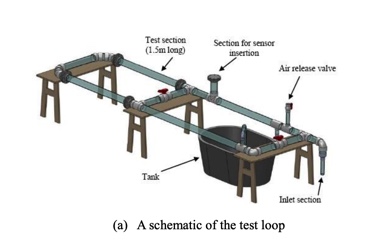
Characterization of In-Pipe Acoustic Wave for Water Leak Detection Proceedings Article
In: ASME 2011 International Mechanical Engineering Congress and Exposition, pp. 995-1000, ACC ACC, 2012, ISBN: 978-0-7918-5494-5.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Acoustic_Wave_Pipe_Leakage,
title = {Characterization of In-Pipe Acoustic Wave for Water Leak Detection},
author = {Atia E Khalifa and Rached Ben-Mansour and Kamal Youcef-Toumi and Changrak Choi},
url = {https://asmedigitalcollection.asme.org/IMECE/proceedings/IMECE2011/54945/995/355499},
doi = {10.1115/IMECE2011-62333},
isbn = {978-0-7918-5494-5},
year = {2012},
date = {2012-08-01},
booktitle = {ASME 2011 International Mechanical Engineering Congress and Exposition},
pages = {995-1000},
publisher = {ACC},
organization = {ACC},
abstract = {This paper presents experimental observations on the characteristics of the acoustic signal propagation and attenuation inside water-filled pipes. An acoustic source (exciter) is mounted on the internal pipe wall, at a fixed location, and produces a tonal sound to simulate a leak noise with controlled frequency and amplitude, under different flow conditions. A hydrophone is aligned with the pipe centerline and can be re-positioned to capture the acoustic signal at different locations. Results showed that the wave attenuation depends on the source frequency and the line pressure. High frequency signals get attenuated more with increasing distance from the source. The optimum location to place the hydrophone for capturing the acoustic signal is not at the vicinity of source location. The optimum location also depends on the frequency and line pressure. It was also observed that the attenuation of the acoustic waves is higher in more flexible pipes like PVC ones.},
keywords = {Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
Rached Ben-Mansour; Kabir Suara; Kamal Youcef-Toumi
Determination of important flow characteristics for leak detection in water pipelines-networks Journal Article
In: Computational Thermal Sciences, vol. 5, pp. 143-151, 2012, ISSN: 143-151.
Abstract | Links | BibTeX | Tags: Control Theory, Inspection, Physical System Modeling, repair & intelligence for water distribution pipes, Robotics & Automation, Simulation
@article{MRL_AFM_Flow_Leak_Detection,
title = {Determination of important flow characteristics for leak detection in water pipelines-networks},
author = {Rached Ben-Mansour and Kabir Suara and Kamal Youcef-Toumi},
url = {http://www.dl.begellhouse.com/journals/648192910890cd0e,1c6ade0932d1248e,18dcce9156c09e65.html},
doi = {10.1615/ComputThermalScien.2013006301},
issn = {143-151},
year = {2012},
date = {2012-07-16},
journal = {Computational Thermal Sciences},
volume = {5},
pages = {143-151},
publisher = {begellhouse},
abstract = {The accuracy of a leak detection method depends greatly on the flow and leak parameters in a given pipeline. This paper gives some insight into the flow characteristics around simulated small leaks. The present computational fluid dynamics (CFD) studies have indicated clear distinctive features in fluid pressure and fluid acceleration that can be used for the early detection of small leaks (<1 of the total flow) in water distribution pipelines. The present CFD simulations based on a steady state standard к − ε turbulent flow model are carried out for different pressure lines in 4 in. (100 m) ID pipe. Based on these simulations, it has been found out that the pressure gradients in the vicinity of the leaks are quite large, hence a leak detection method based on pressure gradient measurement is proposed. In addition, these simulations have shown remarkable gradients in the axial flow acceleration along the centerline of the pipe. These discovered flow features can offer another leak detection method based on the use of accelerometers.},
keywords = {Control Theory, Inspection, Physical System Modeling, repair & intelligence for water distribution pipes, Robotics & Automation, Simulation},
pubstate = {published},
tppubtype = {article}
}
C Choi; D Chatzigeorgiou; R Ben-Mansour; K Youcef-Toumi
Design and analysis of novel friction controlling mechanism with minimal energy for in-pipe robot applications Proceedings Article
In: 2012 IEEE International Conference on Robotics and Automation, pp. 4118-4123, IEEE IEEE, 2012, ISBN: 978-1-4673-1405-3.
Abstract | Links | BibTeX | Tags: Experimentation, Fabrication, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics and Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Friction_Minimization,
title = {Design and analysis of novel friction controlling mechanism with minimal energy for in-pipe robot applications},
author = {C Choi and D Chatzigeorgiou and R Ben-Mansour and K Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/6225380},
doi = {10.1109/ICRA.2012.6225380},
isbn = {978-1-4673-1405-3},
year = {2012},
date = {2012-06-28},
booktitle = {2012 IEEE International Conference on Robotics and Automation},
pages = {4118-4123},
publisher = {IEEE},
organization = {IEEE},
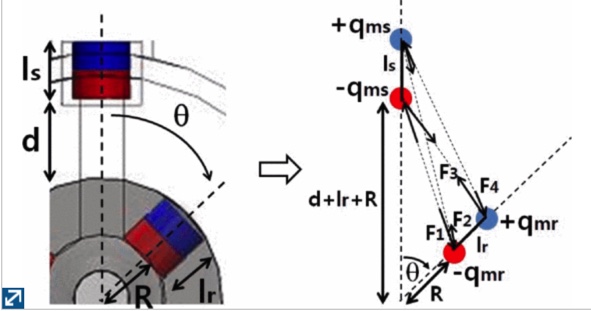
abstract = {In-pipe wheeled robots require friction on the wheels to maintain traction. Ability to vary this friction is highly desirable but conventionally used linkage mechanism is not suitable for it. This paper presents a novel mechanism generating adjustable friction with minimal energy consumption for in-pipe robots. The mechanism uses permanent magnets to achieve the objective. An appropriate model for the system is also presented and discussed. The paper identifies the important design parameters, and more importantly establishes the relation between the design parameters and the system's performance. In addition, a prototype of the mechanism was designed, fabricated and tested for validation.},
keywords = {Experimentation, Fabrication, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics and Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
Dimitris M Chatzigeorgiou; Atia E Khalifa; Kamal Youcef-Toumi; Rached Ben-Mansour
An In-Pipe Leak Detection Sensor: Sensing Capabilities and Evaluation Proceedings Article
In: ASME 2011 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, pp. 481-489, ACC ACC, 2012, ISBN: 978-0-7918-5480-8.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Leak_Capability_Sensor,
title = {An In-Pipe Leak Detection Sensor: Sensing Capabilities and Evaluation},
author = {Dimitris M Chatzigeorgiou and Atia E Khalifa and Kamal Youcef-Toumi and Rached Ben-Mansour},
url = {https://asmedigitalcollection.asme.org/IDETC-CIE/proceedings/IDETC-CIE2011/54808/481/351961},
doi = {10.1115/DETC2011-48411},
isbn = {978-0-7918-5480-8},
year = {2012},
date = {2012-06-12},
booktitle = {ASME 2011 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference},
pages = {481-489},
publisher = {ACC},
organization = {ACC},
abstract = {In most cases the deleterious effects associated with the occurrence of leak may present serious problems and therefore leaks must be quickly detected, located and repaired. The problem of leakage becomes even more serious when it is concerned with the vital supply of fresh water to the community. In addition to waste of resources, contaminants may infiltrate into the water supply. The possibility of environmental health disasters due to delay in detection of water pipeline leaks has spurred research into the development of methods for pipeline leak and contamination detection. Leaks in water pipes create acoustic emissions, which can be sensed to identify and localize leaks. Leak noise correlators and listening devices have been reported in the literature as successful approaches to leak detection but they have practical limitations in terms of cost, sensitivity, reliability and scalability. To overcome those limitations the development of an in-pipe traveling leak detection system is proposed. The development of such a system requires a clear understanding of acoustic signals generated from leaks and the study of the variation of those signals with different pipe loading conditions, leak sizes and surrounding media. This paper discusses those signals and evaluates the merits of an in-pipe-floating sensor.},
keywords = {Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
Dimitris M Chatzigeorgiou; Kamal Youcef-Toumi; Atia E Khalifa; Rached Ben-Mansour
Analysis and Design of an In-Pipe System for Water Leak Detection Proceedings Article
In: ASME 2011 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, pp. 1007-1016, ASME ASME, 2012, ISBN: 978-0-7918-5482-2.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Design_Water_Leak_Detection,
title = {Analysis and Design of an In-Pipe System for Water Leak Detection},
author = {Dimitris M Chatzigeorgiou and Kamal Youcef-Toumi and Atia E Khalifa and Rached Ben-Mansour},
url = {https://asmedigitalcollection.asme.org/IDETC-CIE/proceedings/IDETC-CIE2011/54822/1007/353866},
doi = {10.1115/DETC2011-48395},
isbn = {978-0-7918-5482-2},
year = {2012},
date = {2012-06-12},
booktitle = {ASME 2011 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference},
pages = {1007-1016},
publisher = {ASME},
organization = {ASME},
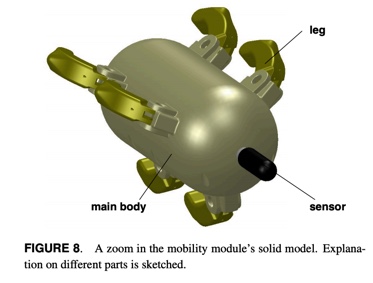
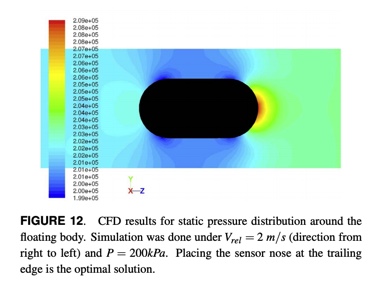
abstract = {In most cases the deleterious effects associated with the occurrence of leaks may present serious problems and therefore, leaks must be quickly detected, located and repaired. The problem of leakage becomes even more serious when it is concerned with the vital supply of fresh water to the community. In addition to waste of resources, contaminants may infiltrate into the water supply. The possibility of environmental health disasters due to delay in detection of water pipeline leaks has spurred research into the development of methods for pipeline leak and contamination detection. Leaking in water networks has been a very significant problem worldwide, especially in developing countries, where water is sparse. Many different techniques have been developed to detect leaks, either from the inside or from the outside of the pipe; each one of them with their advantages, complexities but also limitations. To overcome those limitations we focus our work on the development of an in-pipe-floating sensor. The present paper discusses the design considerations of a novel autonomous system for in-pipe water leak detection. The system is carefully designed to be minimally invasive to the flow within the pipe and thus not to affect the delicate leak signal. One of its characteristics is the controllable motion inside the pipe. The system is capable of pinpointing leaks in pipes while operating in real network conditions, i.e. pressurized pipes and high water flow rates, which are major challenges.},
keywords = {Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
R Ben-Mansour; M A Habib; A Khalifa; K Youcef-Toumi; D Chatzigeorgiou
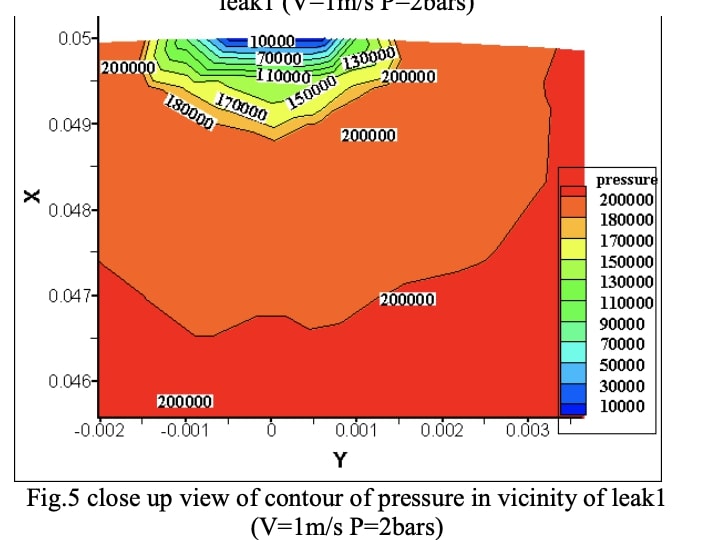
Computational fluid dynamic simulation of small leaks in water pipelines for direct leak pressure transduction Journal Article
In: Computers & Fluids, vol. 57, pp. 110-123, 2012, ISSN: 0045-7930.
Abstract | Links | BibTeX | Tags: Control Theory, Inspection, Physical System Modeling, repair & intelligence for water distribution pipes, Robotics & Automation, Simulation
@article{MRL_AFM_Dynamic_Simulation_Leak_Pipe,
title = {Computational fluid dynamic simulation of small leaks in water pipelines for direct leak pressure transduction},
author = {R Ben-Mansour and M A Habib and A Khalifa and K Youcef-Toumi and D Chatzigeorgiou},
url = {https://www.sciencedirect.com/science/article/pii/S0045793011003884},
doi = {https://doi.org/10.1016/j.compfluid.2011.12.016},
issn = {0045-7930},
year = {2012},
date = {2012-03-30},
journal = {Computers & Fluids},
volume = {57},
pages = {110-123},
publisher = {Science Direct},
abstract = {Computational fluid dynamic simulation of small leaks in a pipe having 0.1m diameter has been performed under realistic velocities and pressures using a 3D turbulent flow model of well tested CFD code. The steady state simulations have shown clear signature in the pressure and pressure gradient variations along the pipe. For very small leaks (below 1l/min), this signature in not very strong in the pressure variation, but very clear in the pressure gradient. The averaged power spectral density (PSD) as well as FFT of the pressure fluctuations based on transient Detached Eddy Simulations (DESs) are presented for different locations around the leak position. These results show that the presence of a leak causes measurable differences in the magnitude and frequency of the pressure signal spectrum and also in the averaged PSD for the range of 220–500Hz frequency.},
keywords = {Control Theory, Inspection, Physical System Modeling, repair & intelligence for water distribution pipes, Robotics & Automation, Simulation},
pubstate = {published},
tppubtype = {article}
}
2011
Vijay Shilpiekandula; Kamal Youcef-Toumi
Integrated Design and Control of Flexure-Based Nanopositioning Systems — Part I: Methodology Proceedings Article
In: pp. 9406-9412, IFAC, 2011, ISSN: 1474-6670, (18th IFAC World Congress).
Abstract | Links | BibTeX | Tags: Control Theory, Mechatronic Design, Nanotechnology, Physical System Modeling, Robot operated modular fixtures, Simulation
@inproceedings{MRL_AFM_Flexure_Nanopositioning_Methodology,
title = {Integrated Design and Control of Flexure-Based Nanopositioning Systems — Part I: Methodology},
author = {Vijay Shilpiekandula and Kamal Youcef-Toumi},
url = {https://www.sciencedirect.com/science/article/pii/S1474667016451232},
doi = {https://doi.org/10.3182/20110828-6-IT-1002.03796},
issn = {1474-6670},
year = {2011},
date = {2011-09-01},
journal = {IFAC Proceedings Volumes},
volume = {44},
number = {1},
pages = {9406-9412},
publisher = {IFAC},
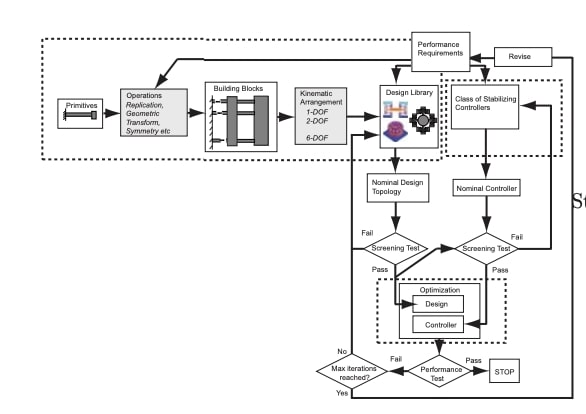
abstract = {Abstract
Flexure-based mechanisms, also referred to as flexures, are widely being used as motion-guidance, or bearing, elements in applications requiring multi-degree-of-freedom positioning and alignment. Unlike friction-bearings (such as sliding or rolling contact bearings), flexures can be designed to offer, to a large extent, reliable linear elastic motion with a high resolution (on the order of nanometers) over small ranges of motion (on order of micrometers). Example applications include positioning a probe or sample in atomic force microscopy, alignment of tool and sample in stamping processes, and fine-positioning of wafers and masks in semiconductor manufacturing. These applications are often required satisfy critical functional requirements, such as load-capacity, bandwidth, resolution, and range. A systematic approach is needed to simultaneously address the design and control challenges involved, starting from the initial design concept generation stage to the final control implementation and testing. In this paper, we present an integrated design and control method for implementing flexure-based nanopositioning systems. We discuss the need for varying design topology and order of a controller in design and control optimization. An automation engine generates a set of flexure-based design topologies and also controllers of varying order in the optimization. A simple 1-DOF example is worked out to illustrate the steps involved in using this methodology. The outcome of the exercise is a novel design topology, with it shape and size optimized, and a controller synthesized such that a desired control bandwidth and design requirements of strength and modal separation are met.},
note = {18th IFAC World Congress},
keywords = {Control Theory, Mechatronic Design, Nanotechnology, Physical System Modeling, Robot operated modular fixtures, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
Flexure-based mechanisms, also referred to as flexures, are widely being used as motion-guidance, or bearing, elements in applications requiring multi-degree-of-freedom positioning and alignment. Unlike friction-bearings (such as sliding or rolling contact bearings), flexures can be designed to offer, to a large extent, reliable linear elastic motion with a high resolution (on the order of nanometers) over small ranges of motion (on order of micrometers). Example applications include positioning a probe or sample in atomic force microscopy, alignment of tool and sample in stamping processes, and fine-positioning of wafers and masks in semiconductor manufacturing. These applications are often required satisfy critical functional requirements, such as load-capacity, bandwidth, resolution, and range. A systematic approach is needed to simultaneously address the design and control challenges involved, starting from the initial design concept generation stage to the final control implementation and testing. In this paper, we present an integrated design and control method for implementing flexure-based nanopositioning systems. We discuss the need for varying design topology and order of a controller in design and control optimization. An automation engine generates a set of flexure-based design topologies and also controllers of varying order in the optimization. A simple 1-DOF example is worked out to illustrate the steps involved in using this methodology. The outcome of the exercise is a novel design topology, with it shape and size optimized, and a controller synthesized such that a desired control bandwidth and design requirements of strength and modal separation are met.
Brett Shapiro; Nergis Mavalvala; Kamal Youcef-Toumi
Actuator sizing of a quadruple pendulum for advanced gravitational wave detectors Proceedings Article
In: Proceedings of the 2011 American Control Conference, pp. 1358-1363, ACC ACC, 2011, ISBN: 978-1-4577-0081-1.
Abstract | Links | BibTeX | Tags: Control Theory, Data-driven learning for intelligent machine maintanence, Experimentation, Fabrication, intelligent systems, Physical System Modeling, Simulation
@inproceedings{MRL_DDL_Actuator_Sizing_Pendulum,
title = {Actuator sizing of a quadruple pendulum for advanced gravitational wave detectors},
author = {Brett Shapiro and Nergis Mavalvala and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/5991170},
doi = {10.1109/ACC.2011.5991170},
isbn = {978-1-4577-0081-1},
year = {2011},
date = {2011-08-18},
booktitle = {Proceedings of the 2011 American Control Conference},
pages = {1358-1363},
publisher = {ACC},
organization = {ACC},
abstract = {The Laser Interferometer Gravitational-Wave Observatory (LIGO) has begun a major set of upgrades to reach a sensitivity better than 10-19 m/√(Hz) in the 10 Hz to 10 kHz frequency band. This advance is expected to bring gravitational wave observations of relativistic astrophysical events such as black hole mergers and supernovae into the realm of regular astronomy. These upgrades require complex vibration isolation systems to better decouple the test masses from ground disturbances. These high performance systems require correspondingly more complex and aggressive active control loops to meet the increased demand in instrument sensitivity. Appropriately sized actuators are essential to achieving the necessary control performance while limiting the cost, noise, and complexity associated with larger actuators. This paper applies the plant's pseudoinverse transfer function to analyze the least squares dynamic range required by the actuators to reject the stochastic disturbances exciting the Advanced LIGO quadruple pendulum isolation systems.},
keywords = {Control Theory, Data-driven learning for intelligent machine maintanence, Experimentation, Fabrication, intelligent systems, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
Tavakoli H Nia; L Han; Y Li; Soltani I Bozchalooi; H Hung; E Frank; K Youcef-Toumi; A Grodzinsky; C Orti
The effect of GAG depletion on cartilage nanoscale hydraulic permeability Proceedings Article
In: ORS 2012 Annual Meeting, pp. 0282, ORS ORS, 2011, ISBN: 978-1-4577-1096-4.
Abstract | Links | BibTeX | Tags: Control Theory, Instrumentation, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation
@inproceedings{MRL_AFM_GAG_Depletion,
title = {The effect of GAG depletion on cartilage nanoscale hydraulic permeability},
author = {Tavakoli H Nia and L Han and Y Li and Soltani I Bozchalooi and H Hung and E Frank and K Youcef-Toumi and A Grodzinsky and C Orti},
url = {http://www.ors.org/Transactions/58/0282.pdf},
doi = {10.1109/ACC.2012.6315281},
isbn = {978-1-4577-1096-4},
year = {2011},
date = {2011-01-01},
booktitle = {ORS 2012 Annual Meeting},
pages = {0282},
publisher = {ORS},
organization = {ORS},
abstract = {The advent of new time-dependent nanomechanical methods has recently enabled the quantification of cartilage tissue poroelasticity and hydraulic permeability, k, at the nanoscale [1-3] and holds great potential for early detection of pathological changes and diagnosis of osteoarthritis (OA). It is known that at the macroscale, tissue hydraulic permeability can undergo several order-of-magnitude changes due to OA [4] while the equilibrium stiffness may vary by only a factor of 2 [5]. This is because GAG chains are the main determinant of the pore size (consequently, hydraulic permeability) of cartilage while they contribute only partially to the compression stiffness of the tissue. Here, we extend the technique of atomic force microscope-based dynamic oscillatory nanoindentation to a larger frequency range (1-10,000 Hz) and compare these data to finite element analysis simulations to study the effect of GAG content, relevant to early stage OA.},
keywords = {Control Theory, Instrumentation, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
2010
Pablo Valdivia y Alvarado; Stephanie Chin; Winston Larson; Anirban Mazumdar; Kamal Youcef-Toumi
A soft body under-actuated approach to multi degree of freedom biomimetic robots: A stingray example Proceedings Article
In: 2010 3rd IEEE RAS EMBS International Conference on Biomedical Robotics and Biomechatronics, pp. 473-478, IEEE IEEE, 2010, ISBN: 978-1-4244-7709-8.
Abstract | Links | BibTeX | Tags: Biomimetic robotic fish for underwater monitoring, Experimentation, Mechatronic Design, Physical System Modeling, Robotics and Automation, Simulation, Visualization
@inproceedings{MRL_BRF_Multi_DOF_Stingray,
title = {A soft body under-actuated approach to multi degree of freedom biomimetic robots: A stingray example},
author = {Pablo Valdivia y Alvarado and Stephanie Chin and Winston Larson and Anirban Mazumdar and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/5627803},
doi = {10.1109/BIOROB.2010.5627803},
isbn = {978-1-4244-7709-8},
year = {2010},
date = {2010-11-11},
booktitle = {2010 3rd IEEE RAS EMBS International Conference on Biomedical Robotics and Biomechatronics},
pages = {473-478},
publisher = {IEEE},
organization = {IEEE},
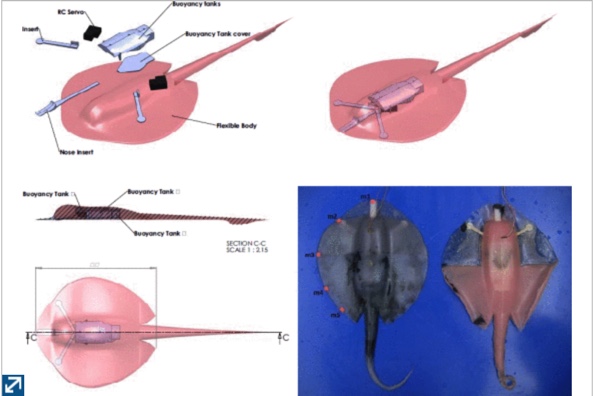
abstract = {In this paper we present a new application of the methodology our group is developing to design and prototype under-actuated biomimetic robots by determining appropriate body material property distributions. When excited, flexible bodies with proper anisotropic material distributions display modes of vibration that mimic required locomotion kinematics and require minimal actuation. Our previous prototypes explored simple two dimensional applications for fish-like swimming. In this paper, the three dimensional vibrational kinematics of a stingray are explored. A simple design is explained, and corresponding prototypes are presented along with preliminary performance data. Our methodology shows great promise to develop simple, robust, and inexpensive mobile robots that can efficiently accomplish locomotion.},
keywords = {Biomimetic robotic fish for underwater monitoring, Experimentation, Mechatronic Design, Physical System Modeling, Robotics and Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
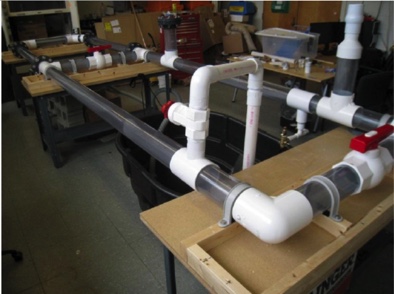
Dimitris M Chatzigeorgiou; Sumeet Kumar; Atia E Khalifa; Ajay Deshpande; Kamal Youcef-Toumi; Sanjay Sarma; Rached Ben-Mansour
In-pipe Acoustic Characterization of Leak Signals in Plastic Water-filled Pipes Proceedings Article
In: AWWA Annual Conference and Exposition (ACE) 2010, AWWA AWWA, 2010.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Acoustic_Leak_Signals,
title = {In-pipe Acoustic Characterization of Leak Signals in Plastic Water-filled Pipes},
author = {Dimitris M Chatzigeorgiou and Sumeet Kumar and Atia E Khalifa and Ajay Deshpande and Kamal Youcef-Toumi and Sanjay Sarma and Rached Ben-Mansour},
url = {https://www.researchgate.net/publication/277303127_In-pipe_Acoustic_Characterization_of_Leak_Signals_in_Plastic_Water-filled_Pipes},
year = {2010},
date = {2010-01-01},
booktitle = {AWWA Annual Conference and Exposition (ACE) 2010},
publisher = {AWWA},
organization = {AWWA},
abstract = {Acoustic emissions can be sensed to identify and localize leaks in water pipes. Leak noise correlators and listening devices have been reported in literature as successful approaches to leak detection but they have practical limitations in terms of cost, sensitivity, reliability and scalability. A possible efficient solution is the development of an in-pipe traveling leak detection system. It has been reported that in-pipe sensing is more accurate and efficient since the sensing element can be very close to the sound source. Currently in-pipe approaches are limited to large leaks and larger diameter pipes. Development of such a system requires clear understanding of acoustic signals generated from leaks and their variation with different pipe loading conditions, leak sizes and surrounding media. This paper discusses the acoustic characterization of leak signals in controlled environments. A lab experimental setup was designed and built in which measurements were taken from inside 4 inch PVC water pipes using a hydrophone. Signals were collected for a wide range of conditions: different pressures and leak flow rates to better understand the leak signal signatures. Experiments were conducted with different pipe connecting elements like valves and junctions, and different external conditions such as pipes placed in water, air and soil. Signals were collected at various distances from the leak location (upstream and downstream) to understand the opportunities of spatial cross-correlation techniques in localizing leaks and the effect of sensor position on the signal. Characterizations of different datasets are presented in frequency domain. The implications of acoustic characterization on the design of algorithms for leak detection are discussed and a simple algorithm to decide whether or not a leak is present near the sensor location is proposed, based on signal power calculations. The characterization gives insights, which will pave ways for the development of smart, autonomous pipe-traversing systems capable of detecting and localizing leaks on a city level water distribution network.},
keywords = {Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
1979
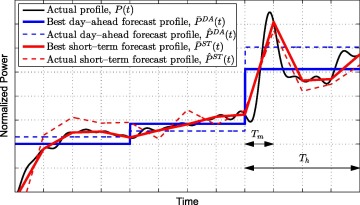
Aramazd Muzhikyan; Amro M Farid; Kamal Youcef-Toumi
An a priori analytical method for the determination of operating reserve requirements Journal Article
In: International Journal of Electrical Power & Energy Systems, vol. 86, pp. 1-17, 1979, ISSN: 0142-0615.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, intelligent systems, Physical System Modeling, Simulation, Uncertainty estimation and calibration for modeling
@article{MRL_AFM_Priori_Operating_Requirements,
title = {An a priori analytical method for the determination of operating reserve requirements},
author = {Aramazd Muzhikyan and Amro M Farid and Kamal Youcef-Toumi},
url = {https://www.sciencedirect.com/science/article/pii/S0142061515300089},
doi = {https://doi.org/10.1016/j.ijepes.2016.09.005},
issn = {0142-0615},
year = {1979},
date = {1979-04-01},
journal = {International Journal of Electrical Power & Energy Systems},
volume = {86},
pages = {1-17},
publisher = {ScienceDirect},
abstract = {Power balance is one of the key requirements for reliable power system operation. However, factors, such as net load variability and forecast errors, impose practical limitations on matching the scheduled generation and the real-time demand. Normally, potential power imbalances are mitigated by scheduling additional generation capacity called operating reserves. However, reserves are a costly commodity and their requirements should be accurately assessed to avoid unnecessary expense. Currently, the reserve requirements are determined using a posteriori methods based upon operator’s experience and established assumptions. While these assumptions are made out of a level of engineering practicality, they may not be formally true given the numerical evidence. This paper presents a formal mathematical framework for the a priori determination of three types of operating reserve requirements, namely load following, ramping and regulation. Validation of the methodology is performed by a set of extensive simulations that model the power system operations for different scenarios. This methodology is used to study the sensitivity of each type of reserve requirement to the net load and power system parameters.},
keywords = {Algorithms, Computational Intelligence, intelligent systems, Physical System Modeling, Simulation, Uncertainty estimation and calibration for modeling},
pubstate = {published},
tppubtype = {article}
}