
Mechatronics Research Lab Publications
List still being populated due to webpage maintenance
2014
Aramazd Muzhikyan; A M Farid; Kamal Youcef-Toumi
An enhanced method for the determination of load following reserves Proceedings Article
In: 2014 American Control Conference, pp. 926-933, IEEE IEEE, 2014, ISBN: 978-1-4799-3274-0.
Abstract | Links | BibTeX | Tags: intelligent systems, Modeling; sizing and control of smart grids, Physical Systems Modeling, Simulation
@inproceedings{MRL_SG_Reserve_Quantification,
title = {An enhanced method for the determination of load following reserves},
author = {Aramazd Muzhikyan and A M Farid and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=6859254&isnumber=6858556},
doi = {10.1109/ACC.2014.6859254},
isbn = {978-1-4799-3274-0},
year = {2014},
date = {2014-07-21},
booktitle = {2014 American Control Conference},
pages = {926-933},
publisher = {IEEE},
organization = {IEEE},
abstract = {Power generation reserves play a central role for maintaining the balance of generation and consumption. Reserves, scheduled in advance, compensate for forecast error, variability and transmission losses. However, as reserves are a costly commodity, their amount should be carefully assessed to prevent unnecessary expense. Currently, the quantity of required reserves are determined based upon a posteriori methods that use operator's experience and established assumptions. This paper instead presents a method founded upon non-dimensional numbers and digitial signal processing to determine the quantity of load following reserves a priori.},
keywords = {intelligent systems, Modeling; sizing and control of smart grids, Physical Systems Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
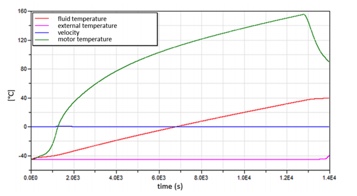
Ethan B Heller; Kamal Youcef-Toumi
Analysis and control of a thermal management system for robots in temperature-restricted environments Proceedings Article
In: 2014 American Control Conference, 2014, ISBN: 978-1-4799-3274-0.
Abstract | Links | BibTeX | Tags: Control Theory, Data-driven learning for intelligent machine maintenance, intelligent systems, Physical System Modeling, Simulation
@inproceedings{MRL_DDL_Thermal_Robot_Management,
title = {Analysis and control of a thermal management system for robots in temperature-restricted environments},
author = {Ethan B Heller and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=6858774&isnumber=6858556},
doi = {10.1109/ACC.2014.6858774},
isbn = {978-1-4799-3274-0},
year = {2014},
date = {2014-06-01},
booktitle = {2014 American Control Conference},
abstract = {Detailed simulations were performed with a model of a proposed thermal management system (TMS) that allows robots to operate within environments that are hostile to the free expulsion of waste heat. Previous simulations have shown that a closed-loop control method is necessary for the proposed TMS to maintain proper robot operation for long missions. A closed-loop control based on model-predictive methods was constructed in MATLAB around the model of the TMS so long missions are possible without violating any of the operating constraints of the robot or the environment. The closed-loop simulations results show that the control successfully maintains robot operation within the environment for a long mission.},
keywords = {Control Theory, Data-driven learning for intelligent machine maintenance, intelligent systems, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
Apoorva Santhosh; Amro Farid; Kamal Youcef-Toumi
Real-time economic dispatch for the supply side of the energy-water nexus Journal Article
In: Applied Energy, vol. 122, pp. 42–52, 2014.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Control Theory, Data-driven learning for intelligent machine maintenance, intelligent systems, Simulation
@article{MRL_AFM_Economic_Energy_Water_Nexus,
title = {Real-time economic dispatch for the supply side of the energy-water nexus},
author = {Apoorva Santhosh and Amro Farid and Kamal Youcef-Toumi},
doi = {10.1016/j.apenergy.2014.01.062},
year = {2014},
date = {2014-06-01},
journal = {Applied Energy},
volume = {122},
pages = {42–52},
publisher = {researchgate},
abstract = {Clean energy and water are two essential resources that any society must securely deliver. Their usage raises sustainability issues and questions of nations’ resilience in face of global changes and mega-trends such as population growth, global climate change, and economic growth. Traditionally, the infrastructure systems that deliver these precious commodities, the water distribution and power transmission networks are thought of as separate, uncoupled systems. However, in reality, they are very much coupled in what is commonly known as the energy-water nexus. Although this subject has recently caught the attention of numerous policy and regulatory agencies, rarely is it holistically addressed in terms of an integrated engineering system for its management, planning, and regulation as an interdisciplinary concern. This work specifically fills this gap by addressing the supply side of this integrated engineering system. Specifically, it develops the multi-plant real-time simultaneous economic dispatch of power and water. While significant background literature has addressed traditional power dispatch, and the emerging co-dispatch of power and heat, as of now there does not exist a parameterized model for the optimized dispatch of power and water for multiple power, water, and coproduction facilities. The work presents such a model where production costs are minimized subject to capacity, demand and process constraints. It is demonstrated on an illustrative example of modest size. Interesting results were observed suggesting that the coproduction minimum capacity limits and process constraints can lead to scenarios where cheaper single product plants can be crowded out of the dispatch. The program provides a systematic method of achieving optimal results and can serve as a basis for set-points upon which individual plants can implement their optimal control. In so doing, it makes a supply-side contribution to the ongoing grand-challenge of improving the sustainability of the energy-water nexus.},
keywords = {Algorithms, Computational Intelligence, Control Theory, Data-driven learning for intelligent machine maintenance, intelligent systems, Simulation},
pubstate = {published},
tppubtype = {article}
}
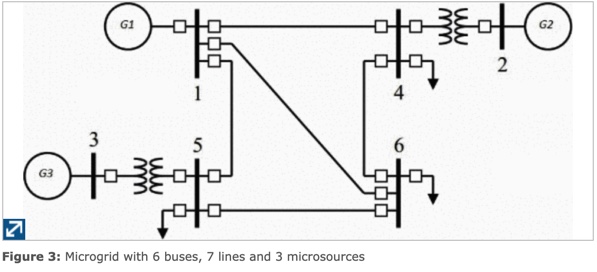
Sergio Rivera; Amro M Farid; Kamal Youcef-Toumi
A multi-agent system transient stability platform for resilient self-healing operation of multiple microgrids Proceedings Article
In: ISGT 2014, pp. 1-5, IEEE IEEE, 2014, ISBN: 978-1-4799-3653-3.
Abstract | Links | BibTeX | Tags: Computational Intelligence, intelligent systems, Modeling; Systems and Control of Smart Grids, Physical System Modeling, Simulation, Visualization
@inproceedings{MRL_SG_Multi_Agent_Micro_Grid,
title = {A multi-agent system transient stability platform for resilient self-healing operation of multiple microgrids},
author = {Sergio Rivera and Amro M Farid and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/6816377},
doi = {10.1109/ISGT.2014.6816377},
isbn = {978-1-4799-3653-3},
year = {2014},
date = {2014-05-19},
booktitle = {ISGT 2014},
pages = {1-5},
publisher = {IEEE},
organization = {IEEE},
abstract = {This paper proposes a multi-agent transient stability platform for the study of self-operation of multiple microgrids. This platform combines a MATLAB-based time domain simulation of the grid's transient stability with a JAVA-JADE (JAVA Agent DEvelopment Framework) which supports the development of multi-agent systems that utilize distributed artificial intelligence techniques that support simultaneous, geographically-distributed, and coordinated decision-making techniques. This hybrid platform leverages the numerical strengths of MATLAB with JAVA's multi-threaded decision-making capability. To that effect, the platform was tested on two complementary test cases: one to demonstrate a dynamic reconfiguration capability and another to demonstrate the decentralized dispatch of multiple microgrids. The work presents many opportunities for future developments in the domain of resilient self-healing operation of power grids.},
keywords = {Computational Intelligence, intelligent systems, Modeling; Systems and Control of Smart Grids, Physical System Modeling, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
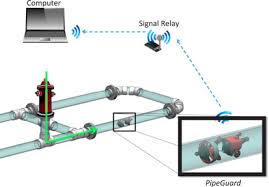
D Chatzigeorgiou; K Youcef-Toumi; R Ben-Mansour
Design of a Novel In-Pipe Reliable Leak Detector Journal Article
In: IEEE/ASME Transactions on Mechatronics, vol. 20, no. 2, pp. 824-833, 2014, ISSN: 1941-014X.
Abstract | Links | BibTeX | Tags: Control Theory, Experimentation, Inspection, Physical System Modeling, repair & intelligence for water distribution pipes, Robotics & Automation
@article{MRL_AFM_Leak_Detector,
title = {Design of a Novel In-Pipe Reliable Leak Detector},
author = {D Chatzigeorgiou and K Youcef-Toumi and R Ben-Mansour},
url = {https://ieeexplore.ieee.org/document/6778062?arnumber=6778062},
doi = {10.1109/TMECH.2014.2308145},
issn = {1941-014X},
year = {2014},
date = {2014-03-25},
journal = {IEEE/ASME Transactions on Mechatronics},
volume = {20},
number = {2},
pages = {824-833},
publisher = {IEEE},
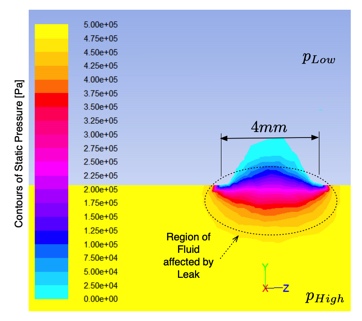
abstract = {Leakage is the major factor for unaccounted losses in every pipe network around the world (oil, gas, or water). In most cases, the deleterious effects associated with the occurrence of leaks may present serious economical and health problems. Therefore, leaks must be quickly detected, located, and repaired. Unfortunately, most state-of-the-art leak detection systems have limited applicability, are neither reliable nor robust, while others depend on the user experience. In this paper, we present a new in-pipe leak detection system. It performs autonomous leak detection in pipes and, thus, eliminates the need for the user experience. This paper focuses on the detection module and its main characteristics. Detection in based on the presence of a pressure gradient in the neighborhood of the leak. Moreover, the proposed detector can sense leaks at any angle around the circumference of the pipe with only two sensors. We validate the concepts by building a prototype and evaluate the system's performance under real conditions in an experimental laboratory setup.},
keywords = {Control Theory, Experimentation, Inspection, Physical System Modeling, repair & intelligence for water distribution pipes, Robotics & Automation},
pubstate = {published},
tppubtype = {article}
}
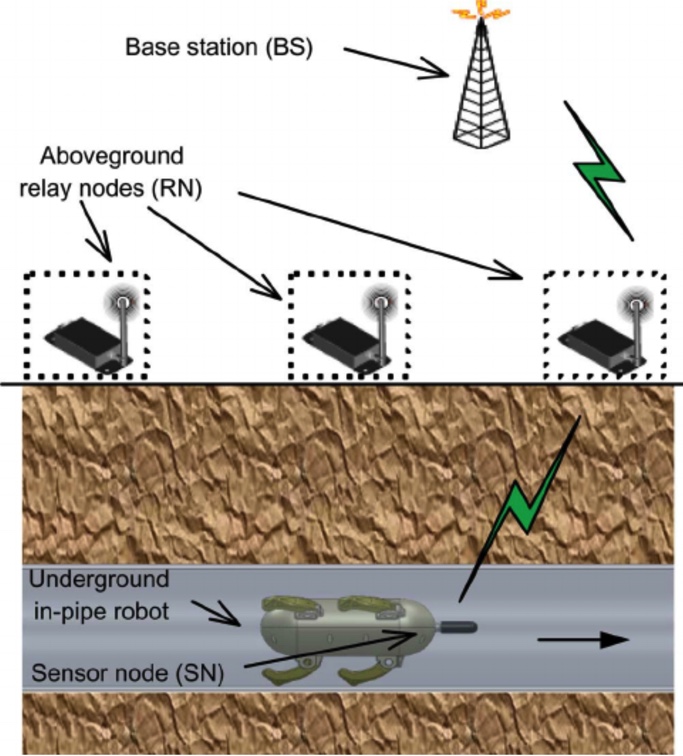
Dalei Wu; Dimitris Chatzigeorgiou; Kamal Youcef-Toumi; Samir Mekid; Rached Ben-Mansour
Channel-Aware Relay Node Placement in Wireless Sensor Networks for Pipeline Inspection Proceedings Article
In: Proceedings of the American Control Conference (2013), ACC ACC, 2014, ISSN: 1536-1276.
Abstract | Links | BibTeX | Tags: Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Node_Pipeline_Inspection,
title = {Channel-Aware Relay Node Placement in Wireless Sensor Networks for Pipeline Inspection},
author = {Dalei Wu and Dimitris Chatzigeorgiou and Kamal Youcef-Toumi and Samir Mekid and Rached Ben-Mansour},
url = {https://www.researchgate.net/publication/261282962_Channel-Aware_Relay_Node_Placement_in_Wireless_Sensor_Networks_for_Pipeline_Inspection},
doi = {10.1109/TWC.2014.2314120},
issn = {1536-1276},
year = {2014},
date = {2014-03-24},
booktitle = {Proceedings of the American Control Conference (2013)},
publisher = {ACC},
organization = {ACC},
abstract = {Wireless sensor networks (WSNs) provide an effective approach for underground pipeline inspection. Such WSNs comprise of sensor nodes (SNs) and relay nodes (RNs) for information sensing and communication. WSNs can perform accurate and realtime inspection, especially in adverse environments. However, transmitting information between underground and aboveground nodes is very challenging due to the mobility and limited energy supply of the SNs as well as complex radio propagation environment. Therefore, proper deployment of a WSN is critical to provide reliable communications and efficient inspection. This paper presents a methodology for deploying aboveground RNs in WSNs. Specifically, it provides an optimum placement of RNs along with energy use so as to allow reliable communications. This method takes into account characteristics of the wireless channels, energy consumption, pipeline coverage requirements, and SN's transmission power levels. The paper provides a path loss model for radio propagation over multiple transmission media and an algorithm for optimization of RN placement and SN's transmission power. Simulation results show the efficacy of the proposed framework.},
keywords = {Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
Apoorva Santhosh; Amro M Farid; Kamal Youcef-Toumi
Optimal network flow for the supply side of the energy-water nexus Proceedings Article
In: 2013 IEEE International Workshop on Inteligent Energy Systems (IWIES), pp. 155-160, IEEE IEEE, 2014, ISBN: 978-1-4799-1135-6.
Abstract | Links | BibTeX | Tags: Algorithms, intelligent systems, Modeling; sizing and control for smart grids, Physical System Modeling, Simulation
@inproceedings{MRL_SG_Water_Plant_Sustainability,
title = {Optimal network flow for the supply side of the energy-water nexus},
author = {Apoorva Santhosh and Amro M Farid and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/6698578},
doi = {10.1109/IWIES.2013.6698578},
isbn = {978-1-4799-1135-6},
year = {2014},
date = {2014-01-06},
booktitle = {2013 IEEE International Workshop on Inteligent Energy Systems (IWIES)},
pages = {155-160},
publisher = {IEEE},
organization = {IEEE},
abstract = {Clean energy and water are two essential resources that any society must securely deliver. Their usage raises sustainability issues and questions of nations' resilience in face of global changes and mega-trends such as population growth, global climate change, and economic growth. Recently, attention has been paid to the infrastructure systems for water distribution and power transmission and the coupling between them in what is commonly known as the energy-water nexus. Although numerous policy and regulatory agencies have addressed the subject, rarely is it holistically addressed in terms of an integrated engineering system for its management, planning, and regulation as an interdisciplinary concern. This work specifically addresses the supply side of this integrated engineering system framework. It takes as its subject the real-time optimal flows in power and water networks. Significant background literature is brought to bear on this topic including the emerging co-dispatch of power and water and the more well established optimizations for power and water networks individually. The work presents a mathematical optimization program for the co-dispatch of the two commodities for three types of plants: power generation plants, co-production facilities and water production plants. Production costs are minimized subject to capacity, demand and transmission constraints and demonstrated on an illustrative example of modest size developed from standard test cases. On a practical basis, the program can be applied directly in middle eastern countries where water and power distribution are typically under the responsibility of a single utility. Furthermore, the program provides a systematic method of achieving optimal results and can serve as a basis for set-points upon which individual plants can implement their optimal control. In so doing, it makes a supply-side contribution to the ongoing grand-challenge of improving the sustainability of the energy-water nexus.},
keywords = {Algorithms, intelligent systems, Modeling; sizing and control for smart grids, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
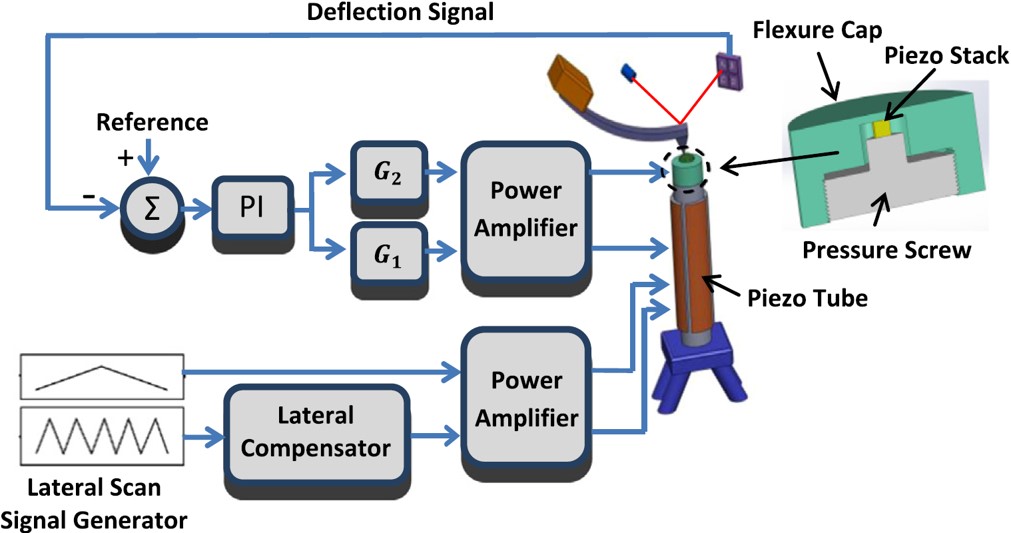
Iman Soltani Bozchalooi; Kamal Youcef-Toumi
Multi-actuation and PI control: A simple recipe for high-speed and large-range atomic force microscopy Journal Article
In: Ültramicroscopy, vol. 146, pp. 117 - 124, 2014, ISSN: 0304-3991.
Abstract | Links | BibTeX | Tags: Control Theory, Experimentation, Instrumentation, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation
@article{MRL_AFM_Multi_PI_control,
title = {Multi-actuation and PI control: A simple recipe for high-speed and large-range atomic force microscopy},
author = {Iman Soltani Bozchalooi and Kamal Youcef-Toumi},
url = {http://www.sciencedirect.com/science/article/pii/S0304399114001491},
doi = {https://doi.org/10.1016/j.ultramic.2014.07.010},
issn = {0304-3991},
year = {2014},
date = {2014-01-01},
journal = {Ültramicroscopy},
volume = {146},
pages = {117 - 124},
abstract = {High speed atomic force microscopy enables observation of dynamic nano-scale processes. However, maintaining a minimal interaction force between the sample and the probe is challenging at high speed specially when using conventional piezo-tubes. While rigid AFM scanners are operational at high speeds with the drawback of reduced tracking range, multi-actuation schemes have shown potential for high-speed and large-range imaging. Here we present a method to seamlessly incorporate additional actuators into conventional AFMs. The equivalent behavior of the resulting multi-actuated setup resembles that of a single high-speed and large-range actuator with maximally flat frequency response. To achieve this, the dynamics of the individual actuators and their couplings are treated through a simple control scheme. Upon the implementation of the proposed technique, commonly used PI controllers are able to meet the requirements of high-speed imaging. This forms an ideal platform for retroactive enhancement of existing AFMs with minimal cost and without compromise on the tracking range. A conventional AFM with tube scanner is retroactively enhanced through the proposed method and shows an order of magnitude improvement in closed loop bandwidth performance while maintaining large range. The effectiveness of the method is demonstrated on various types of samples imaged in contact and tapping modes, in air and in liquid.},
keywords = {Control Theory, Experimentation, Instrumentation, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {article}
}
2013
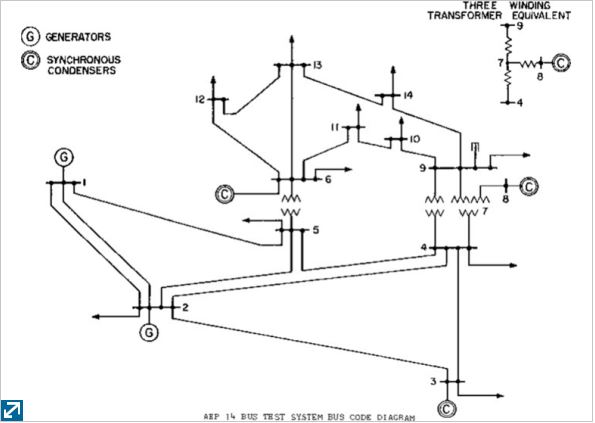
Reshma Francy; Amro M Farid; Kamal Youcef-Toumi
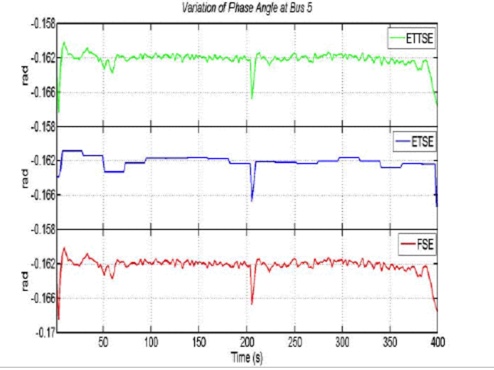
An event triggered tracking state estimator for power systems with integrated wind generation Proceedings Article
In: 2013 IEEE Grenoble Conference, pp. 1-6, IEEE IEEE, 2013, ISBN: 978-1-4673-5669-5.
Abstract | Links | BibTeX | Tags: intelligent systems, Modelling; sizing and control of smart grids, Physical Systems Modeling, Simulation
@inproceedings{MRL_SG_Wind_Energy_Integration,
title = {An event triggered tracking state estimator for power systems with integrated wind generation},
author = {Reshma Francy and Amro M Farid and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/6617292},
doi = {10.1109/PTC.2013.6652180},
isbn = {978-1-4673-5669-5},
year = {2013},
date = {2013-11-04},
booktitle = {2013 IEEE Grenoble Conference},
pages = {1-6},
publisher = {IEEE},
organization = {IEEE},
abstract = {For many decades, state estimation has been a critical technology in the energy management systems utilized by transmission system operators. Over time, it has become a mature technology that provides an accurate representation of system state under fairly stable and well understood system operation. The integration of variable energy resources such as wind and solar generation, however, introduce new dynamics and uncertainties into the system. Along with increase in variability which needs real time monitoring, state estimation will be extended to the distribution networks which increase the size of the problem. Conventional solutions to this problem result in large problem sets being solved at a faster rate thereby becoming computationally intensive. This work builds upon the recent contribution of event-triggering where the state estimator is only called in the case of considerable “novelty” in the evolution of the system state. Specifically, the concept of tracking saves significant computational effort at minimal expense of error by allowing for the update of system state between two consecutive triggered instances. The new event-triggered tracking state estimator (ETTSE) is demonstrated on the standard IEEE 14-bus system, and the results are observed for a specific bus.},
keywords = {intelligent systems, Modelling; sizing and control of smart grids, Physical Systems Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
Apoorva Santhosh; Amro M Farid; Kamal Youcef-Toumi
Design and Evaluation of an In-Pipe Leak Detection Sensing Technique Based on Force Transduction Proceedings Article
In: ASME 2012 International Mechanical Engineering Congress and Exposition, IEEE IEEE, 2013, ISBN: 978-0-7918-4520-2.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Force_Transduction_Leaking,
title = {Design and Evaluation of an In-Pipe Leak Detection Sensing Technique Based on Force Transduction},
author = {Apoorva Santhosh and Amro M Farid and Kamal Youcef-Toumi},
url = {https://asmedigitalcollection.asme.org/IMECE/proceedings/IMECE2012/45202/489/254570},
doi = {10.1115/IMECE2012-87493},
isbn = {978-0-7918-4520-2},
year = {2013},
date = {2013-10-08},
booktitle = {ASME 2012 International Mechanical Engineering Congress and Exposition},
publisher = {IEEE},
organization = {IEEE},
abstract = {Leakage is the major factor for unaccounted fluid losses in almost every pipe network. In most cases the deleterious effects associated with the occurrence of leaks may present serious economical and health problems and therefore, leaks must be quickly detected, located and repaired. The problem of leakage becomes even more serious when it is concerned with the vital supply of fresh water to the community. Leaking water pipelines can develop large health threats to people mostly because of the infiltration of contaminants into the water network. Such possibilities of environmental health disasters have spurred research into the development of methods for pipeline leakage detection. Most state of the art leak detection techniques have limited applicability, while some of them are not reliable enough and sometimes depend on user experience. Our goal in this work is to design and develop a reliable leak detection sensing system. The proposed technology utilizes the highly localized pressure gradient in the vicinity of a small opening due to leakage in a pressurized pipeline. In this paper we study this local phenomenon in detail and try to understand it with the help of numerical simulations in leaking pipelines (CFD studies). Finally a new system for leak detection is presented. The proposed system is designed in order to reduce the number of sensing elements required for detection. The main concept and detailed design are laid out. A prototype is fabricated and presented as a proof of concept. The prototype is tested in a simple experimental setup with artificial leakages for experimental evaluation. The sensing technique discussed in this work can be deployed in water, oil and gas pipelines without significant changes in the design, since the concepts remain the same in all cases.},
keywords = {Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
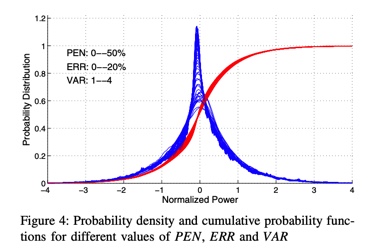
Aramazd Muzhikyan; Amro M Farid; Kamal Youcef-Toumi
Variable energy resource induced power system imbalances: Mitigation by increased system flexibility, spinning reserves and regulation Proceedings Article
In: 2013 1st IEEE Conference on Technologies for Sustainability (SusTech), pp. 15-22, IEEE IEEE, 2013, ISBN: 978-1-4673-4630-6.
Abstract | Links | BibTeX | Tags: Algorithms, intelligent systems, Modeling; sizing and control for smart grids, Physical System Modeling, Simulation
@inproceedings{MRL_SG_Generalized_Reserve_Analysis,
title = {Variable energy resource induced power system imbalances: Mitigation by increased system flexibility, spinning reserves and regulation},
author = {Aramazd Muzhikyan and Amro M Farid and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/6617292},
doi = {10.1109/SusTech.2013.6617292},
isbn = {978-1-4673-4630-6},
year = {2013},
date = {2013-10-03},
booktitle = {2013 1st IEEE Conference on Technologies for Sustainability (SusTech)},
pages = {15-22},
publisher = {IEEE},
organization = {IEEE},
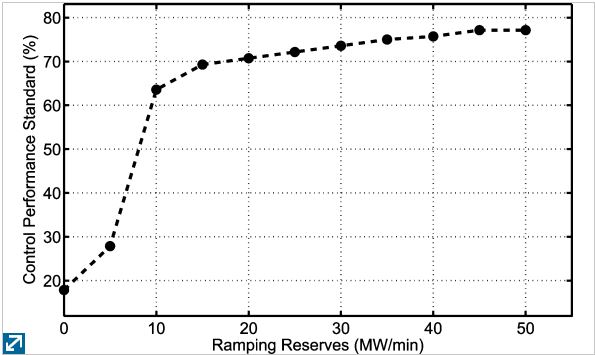
abstract = {The impact of variable energy resources (VER) on power system reserve and regulation requirements has been a subject of extensive research in recent years. However, the conclusions about the scale of the impact diverge, since most of the results are obtained from specific case studies. This paper proposes a generalized approach to the assessment of power system reserve and regulation requirements. It uses a power system enterprise model that consists of three layers: the physical grid, resource scheduling and balancing operations. Resource scheduling is modeled as a security-constrained unit-commitment (SCUC) problem. The balancing layer consists of three components, namely the regulation service, the real-time market and operator manual actions. The real-time market is implemented as a security-constrained economic dispatch (SCED) problem. The IEEE RTS96 reliability test system is used for the physical layer. Three main resources contributing to the balancing of power system are studied: reserves, regulation and generator ramping rates. Their impacts on power system imbalance mitigation in the presence of VER is studied.},
keywords = {Algorithms, intelligent systems, Modeling; sizing and control for smart grids, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
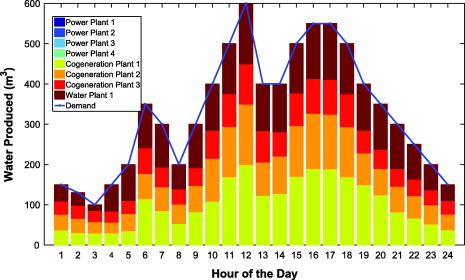
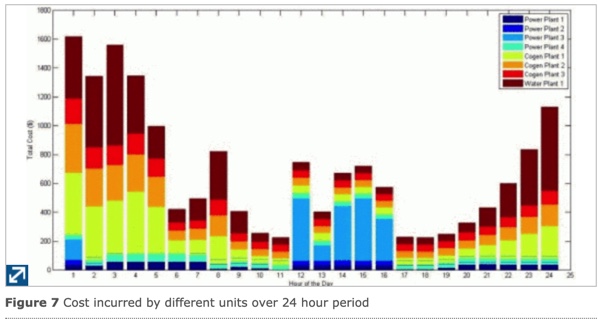
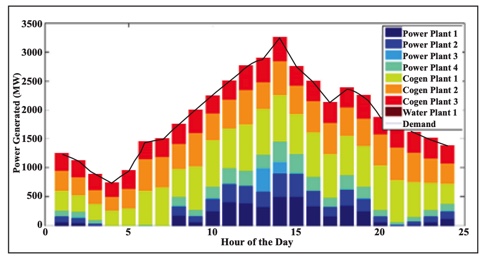
Apoorva Santhosh; Amro M Farid; A Adegbege; Kamal Youcef-Toumi
Simultaneous co-optimization for the economic dispatch of power and water networks Proceedings Article
In: 9th IET International Conference on Advances in Power System Control, Operation and Management (APSCOM 2012), pp. 1-6, IEEE IEEE, 2013, ISBN: 978-1-84919-743-4.
Abstract | Links | BibTeX | Tags:
@inproceedings{MRL_SG_Co_Optimization_Networks,
title = {Simultaneous co-optimization for the economic dispatch of power and water networks},
author = {Apoorva Santhosh and Amro M Farid and A Adegbege and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/6615058},
doi = {10.1049/cp.2012.2148},
isbn = {978-1-84919-743-4},
year = {2013},
date = {2013-09-30},
booktitle = {9th IET International Conference on Advances in Power System Control, Operation and Management (APSCOM 2012)},
pages = {1-6},
publisher = {IEEE},
organization = {IEEE},
abstract = {Water distribution and power transmission networks are thought of as separate uncoupled infrastructure systems. In reality, they may be viewed as a single system which may be called the energy-water nexus. In hot and arid climates, this nexus takes on a deeper meaning in terms of the economic dispatch of power, water and cogenerating desalination units. This paper represents a co-optimization framework for the economic dispatch of water and electric power. In particular, an optimization program is provided that minimizes total costs as a function of power and water generation subject to demand, capacity and process constraints. It is distinct from existing literature in that it focuses on the simultaneous optimal operation of all plants within the power and water delivery networks within a generalized mathematical formulation. The optimization was then demonstrated on a hypothetical system composed of four power plants, three cogenerators and one pure water plant. Interesting results were observed suggesting that the cogenerator minimum capacity limits and process constraints can lead to scenarios where cheaper single product plants can be crowded out of the dispatch. The program provides a systematic method of achieving optimal results and can serve as basis for set-points upon which individual plants can implement their optimal control.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
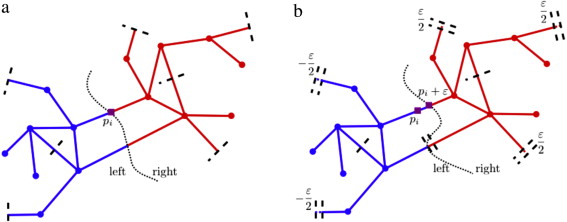
Ajay Deshpande; Sanjay E Sarma; Kamal Youcef-Toumi; Samir Mekid
Optimal coverage of an infrastructure network using sensors with distance-decaying sensing quality Journal Article
In: Automatica, vol. 49, no. 11, pp. 3351-3358, 2013, ISSN: 0005-1098.
Abstract | Links | BibTeX | Tags: Experimentation, Fabrication, Instrumentation, Mechatronic Design, Modeling; sizing and control of smart grids, Physical System Modeling
@article{MRL_AFM_Distance_Decaying_Sensors,
title = {Optimal coverage of an infrastructure network using sensors with distance-decaying sensing quality},
author = {Ajay Deshpande and Sanjay E Sarma and Kamal Youcef-Toumi and Samir Mekid},
url = {https://www.sciencedirect.com/science/article/pii/S0005109813003774},
doi = {https://doi.org/10.1016/j.automatica.2013.07.029},
issn = {0005-1098},
year = {2013},
date = {2013-08-27},
journal = {Automatica},
volume = {49},
number = {11},
pages = {3351-3358},
publisher = {elsevier},
abstract = {Motivated by recent applications of wireless sensor networks in monitoring infrastructure networks, we address the problem of optimal coverage of infrastructure networks using sensors whose sensing performance decays with distance. We show that this problem can be formulated as a continuous p-median problem on networks. The literature has addressed the discrete p-median problem on networks and in continuum domains, and the continuous p-median problem in continuum domains extensively. However, in-depth analysis of the continuous p-median problem on networks has been lacking. With the sensing performance model that decays with distance, each sensor covers a region equivalent to its Voronoi partition on the network in terms of the shortest path distance metric. Using Voronoi partitions, we define a directional partial derivative of the coverage metric with respect to a sensor’s location. We then propose a gradient descent algorithm to obtain a locally optimal solution with guaranteed convergence. The quality of an optimal solution depends on the choice of the initial configuration of sensors. We obtain an initial configuration using two approaches: by solving the discrete p-median problem on a lumped network and by random sampling. We consider two methods of random sampling: uniform sampling and D2-sampling. The first approach with the initial solution of the discrete p-median problem leads to the best coverage performance for large networks, but at the cost of high running time. We also observe that the gradient descent on the initial solution with the D2-sampling method yields a solution that is within at most 7% of the previous solution and with much shorter running time.},
keywords = {Experimentation, Fabrication, Instrumentation, Mechatronic Design, Modeling; sizing and control of smart grids, Physical System Modeling},
pubstate = {published},
tppubtype = {article}
}
A Santhosh; Amro M Farid; Kamal Youcef-Toumi
The impact of storage facilities on the simultaneous economic dispatch of power and water networks limited by ramping constraints Proceedings Article
In: 2013 IEEE International Conference on Industrial Technology (ICIT), pp. 922-927, IEEE IEEE, 2013, ISBN: 978-1-4673-4569-9.
Abstract | Links | BibTeX | Tags: intelligent systems, Modelling; sizing and control of smart grids, Physical Systems Modeling, Simulation
@inproceedings{MRL_SG_Water_Networks_Storage,
title = {The impact of storage facilities on the simultaneous economic dispatch of power and water networks limited by ramping constraints},
author = {A Santhosh and Amro M Farid and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/6505794},
doi = {10.1109/ICIT.2013.6505794},
isbn = {978-1-4673-4569-9},
year = {2013},
date = {2013-04-23},
booktitle = {2013 IEEE International Conference on Industrial Technology (ICIT)},
pages = {922-927},
publisher = {IEEE},
organization = {IEEE},
abstract = {Recently, the production and consumption of energy and water resources and their potential coupling in what is often called the energy-water nexus has gained attention as an issue of global concern[1, 2]. Ultimately, a significant amount of water is required to produce energy and vice versa [2, 3]; motivating the need for co-optimization based approaches for the two resources. Recently, one such simultaneous co-optimization method has been contributed for the economic dispatch of networks that include water, power and co-production facilities [4]. That study showed that capacity and process constraints often limit total production cost. This paper seeks to add plant ramping behavior as potentially binding constraints and investigate the impact of water and storage facilities as a technology that can help alleviate binding constraints and lead to more levelized production and cost levels. The paper builds upon the optimization program provided in previous work [4] to develop two optimization programs with and without storage facilities and compares their respective results. Storage facilities are shown to reduce total operating costs and lead to more levelized daily production suggesting that they have an important role to play in the optimization of the energy-water nexus.},
keywords = {intelligent systems, Modelling; sizing and control of smart grids, Physical Systems Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
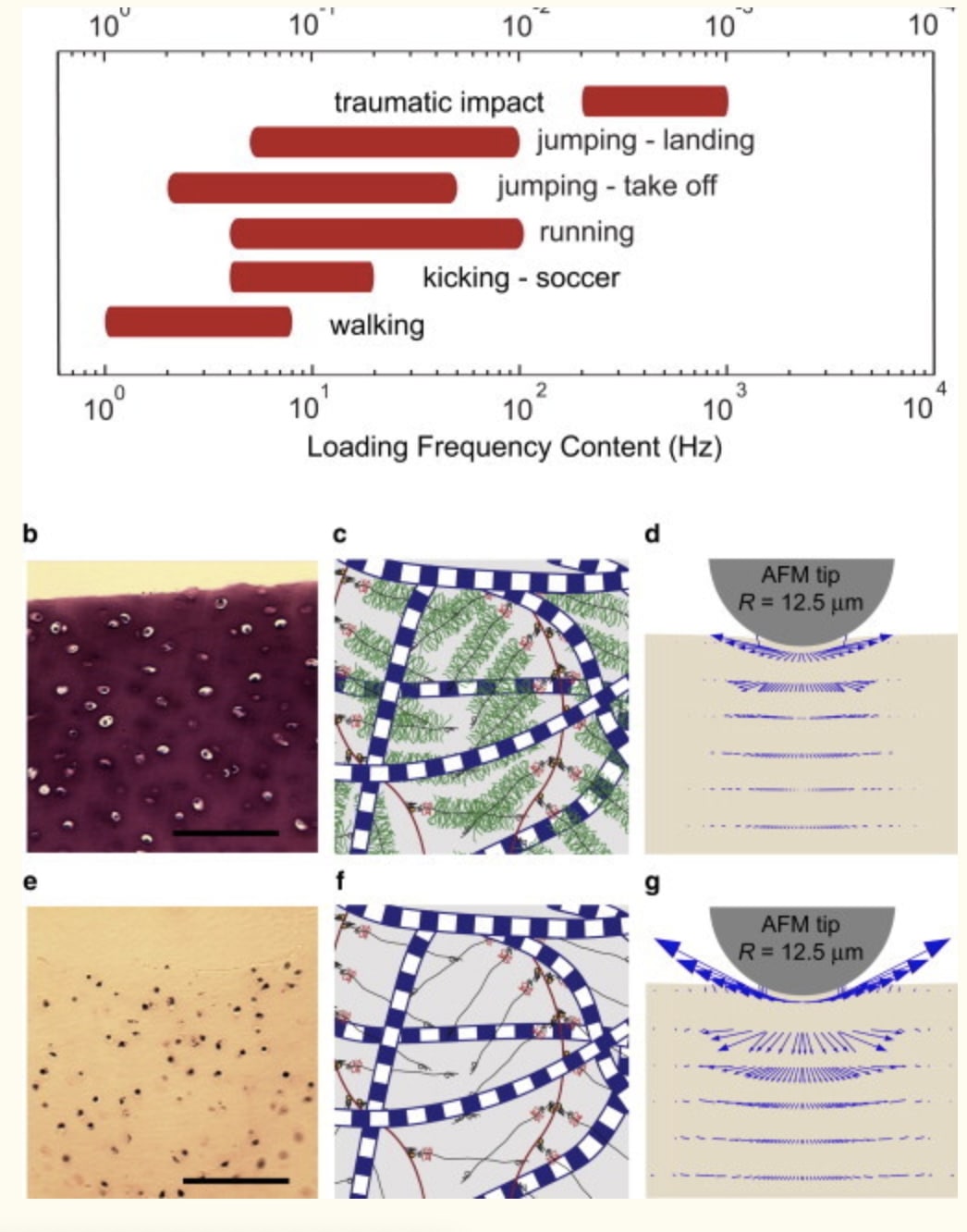
Hadi Nia; Iman Soltani; Yang Li; Lin Han; Han-Hwa Hung; Eliot Frank; Kamal Youcef-Toumi; Christine Ortiz; Alan Grodzinsky
High-Bandwidth AFM-Based Rheology Reveals that Cartilage is Most Sensitive to High Loading Rates at Early Stages of Impairment Journal Article
In: Biophysical journal, vol. 104, pp. 1529-37, 2013, ISSN: 00063496.
Abstract | Links | BibTeX | Tags: Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Visualization
@article{MRL_AFM_Cartilage_Early_Impairment,
title = {High-Bandwidth AFM-Based Rheology Reveals that Cartilage is Most Sensitive to High Loading Rates at Early Stages of Impairment},
author = {Hadi Nia and Iman Soltani and Yang Li and Lin Han and Han-Hwa Hung and Eliot Frank and Kamal Youcef-Toumi and Christine Ortiz and Alan Grodzinsky},
url = {https://dspace.mit.edu/handle/1721.1/92000},
doi = {10.1016/j.bpj.2013.02.048},
issn = {00063496},
year = {2013},
date = {2013-04-02},
journal = {Biophysical journal},
volume = {104},
pages = {1529-37},
publisher = {Elsevier B.V},
abstract = {Utilizing a newly developed atomic-force-microscopy-based wide-frequency rheology system, we measured the dynamic nanomechanical behavior of normal and glycosaminoglycan (GAG)-depleted cartilage, the latter representing matrix degradation that occurs at the earliest stages of osteoarthritis. We observed unique variations in the frequency-dependent stiffness and hydraulic permeability of cartilage in the 1 Hz-to-10 kHz range, a frequency range that is relevant to joint motions from normal ambulation to high-frequency impact loading. Measurement in this frequency range is well beyond the capabilities of typical commercial atomic force microscopes. We showed that the dynamic modulus of cartilage undergoes a dramatic alteration after GAG loss, even with the collagen network still intact: whereas the magnitude of the dynamic modulus decreased two- to threefold at higher frequencies, the peak frequency of the phase angle of the modulus (representing fluid-solid frictional dissipation) increased 15-fold from 55 Hz in normal cartilage to 800 Hz after GAG depletion. These results, based on a fibril-reinforced poroelastic finite-element model, demonstrated that GAG loss caused a dramatic increase in cartilage hydraulic permeability (up to 25-fold), suggesting that early osteoarthritic cartilage is more vulnerable to higher loading rates than to the conventionally studied “loading magnitude”. Thus, over the wide frequency range of joint motion during daily activities, hydraulic permeability appears the most sensitive marker of early tissue degradation.},
keywords = {Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Visualization},
pubstate = {published},
tppubtype = {article}
}
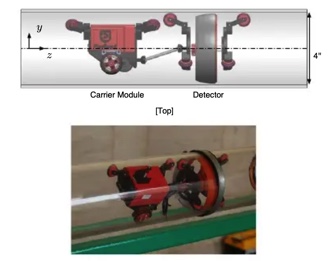
Dimitris Chatzigeorgiou; You Wu; Kamal Youcef-Toumi; Rached Ben-Mansour
Reliable Sensing of Leaks in Pipelines Proceedings Article
In: AWWA Annual Conference and Exposition, 2014, ASME ASME, 2013, ISBN: 978-0-7918-5613-0.
Abstract | Links | BibTeX | Tags: Inspection; repair and intelligence for water distribution pipes, Physical Systems Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Reliable_Leak_Sensing,
title = {Reliable Sensing of Leaks in Pipelines},
author = {Dimitris Chatzigeorgiou and You Wu and Kamal Youcef-Toumi and Rached Ben-Mansour},
url = {https://www.academia.edu/8791279/Chatzigeorgiou_D._Wu_Y._Youcef-Toumi_K._and_Ben-Mansour_R._Reliable_Sensing_of_Leaks_in_Pipelines_ASME_Dynamic_Systems_and_Control_Conference_2013},
isbn = {978-0-7918-5613-0},
year = {2013},
date = {2013-01-01},
booktitle = {AWWA Annual Conference and Exposition, 2014},
publisher = {ASME},
organization = {ASME},
abstract = {Leakage is the major factor for unaccounted losses in every pipe network around the world (oil, gas or water). In most cases the deleterious effects associated with the occurrence of leaks may present serious economical and health problems. Therefore, leaks must be quickly detected, located and repaired. Unfortunately, most state of the art leak detection systems have limited applicability, are neither reliable nor robust, while others depend on user experience. In this work we present a new in-pipe leak detection system, PipeGuard. PipeGuard performs autonomous leak detection in pipes and, thus, eliminates the need for user experience. This paper focuses on the detection module and its main characteristics. Detection in based on the presence of a pressure gradient in the neighborhood of the leak. Moreover, the proposed detector can sense leaks at any angle around the circumference of the pipe with only two sensors. We have validated the concepts by building a prototype and evaluated its performance under real conditions in an experimental laboratory setup.},
keywords = {Inspection; repair and intelligence for water distribution pipes, Physical Systems Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
William N Lubega; Apoorva Santhosh; Amro M Farid; Kamal Youcef-Toumi
Opportunities for Integrated Energy and Water Management in the GCC Proceedings Article
In: EU-GCC Renewable Energy Policy Experts' Workshop, Gulf Research Center, 2013, ISBN: 978-1-4799-3685-4.
Abstract | Links | BibTeX | Tags: intelligent systems, Modeling; sizing and control of smart grids
@inproceedings{MRL_SG_Integrated_Energy_Management,
title = {Opportunities for Integrated Energy and Water Management in the GCC},
author = {William N Lubega and Apoorva Santhosh and Amro M Farid and Kamal Youcef-Toumi},
url = {http://amfarid.scripts.mit.edu/resources/Conferences/EWN-C36.pdf},
isbn = {978-1-4799-3685-4},
year = {2013},
date = {2013-01-01},
booktitle = {EU-GCC Renewable Energy Policy Experts' Workshop},
publisher = {Gulf Research Center},
abstract = {Electric power is required to produce, treat, distribute, and recycle water while water is required to generate and consume electricity. The goal of this position paper is to identify and motivate opportunities for the operations management and planning of the energy-water nexus. It proceeds in three parts. First, an exposition of the energy-water nexus especially as it applies to the GCC is given. This discussion focuses on the electric power system, the potable water distribution system, and the wastewater distribution system. Then, the paper shifts to opportunities in operations management where recent work in the Laboratory for Intelligent Integrated Networks of Engineering Systems has produced a number of optimization programs to support the deregulated operation of integrated energy-water markets. To highlight the viability of this idea, an energy-water nexus supply side economic dispatch is presented. Finally, the position paper shifts to discuss planning opportunities for the energy-water nexus for the sustainable development of water and energy resources. These include new methods that encourage renewable energy penetration and balance the portfolio of desalination technologies. It also includes integrated strategies for the design of water infrastructure to minimize embedded energy while reusing water of various qualities. The paper concludes with a description of opportunities for EUGCC collaboration to support the purpose of the workshop.},
keywords = {intelligent systems, Modeling; sizing and control of smart grids},
pubstate = {published},
tppubtype = {inproceedings}
}
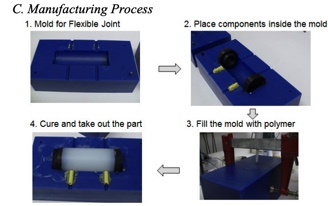
Changrak Choi; Kamal Youcef-Toumi
Robot design for high flow liquid pipe networks Proceedings Article
In: 2013 IEEE/RSJ International Conference onIntelligent Robots and Systems (IROS), pp. 246-251, IEEE IEEE, 2013.
Abstract | Links | BibTeX | Tags: Experimentation, Fabrication, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation
@inproceedings{MRL_WDP_High_Flow_Pipe_Robot,
title = {Robot design for high flow liquid pipe networks},
author = {Changrak Choi and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=6696360&isnumber=6696319},
doi = {10.1109/IROS.2013.6696360},
year = {2013},
date = {2013-01-01},
booktitle = {2013 IEEE/RSJ International Conference onIntelligent Robots and Systems (IROS)},
pages = {246-251},
publisher = {IEEE},
organization = {IEEE},
abstract = {In-pipe robots are important for inspection of pipe network that form vital infrastructure of modern society. Nevertheless, most in-pipe robots developed so far are targeted at working inside gas pipes and not suitable for liquid pipes. This paper presents a new approach for designing in-pipe robot to work inside a liquid environment in the presence of high drag forces. Three major subsystems - propulsion, braking, and turning - are described in detail with new concepts and mechanisms that differ from conventional in-pipe robots. Prototypes of each subsystem are designed, built and tested for validation. Resulting is a robot design that navigates efficiently inside liquid pipe network and can be used for practical inspection purposes.},
keywords = {Experimentation, Fabrication, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
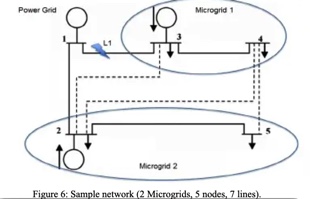
Sergio Rivera; Amro Farid; Kamal Youcef-Toumi
Coordination and Control of Multiple Microgrids Using Multi-Agent Systems Proceedings Article
In: Energypath 2013: Our Global Sustainable Energy Future, 2013, ISBN: 978-1-4673-5669-5.
Abstract | Links | BibTeX | Tags: intelligent systems, Modelling; sizing and control of smart grids, Physical Systems Modeling, Simulation
@inproceedings{MRL_SG_Multi_Microgrid_Coordination,
title = {Coordination and Control of Multiple Microgrids Using Multi-Agent Systems},
author = {Sergio Rivera and Amro Farid and Kamal Youcef-Toumi},
url = {https://www.researchgate.net/publication/265042254_Coordination_and_Control_of_Multiple_Microgrids_Using_Multi-Agent_Systems},
doi = {10.1109/PTC.2013.6652180},
isbn = {978-1-4673-5669-5},
year = {2013},
date = {2013-01-01},
booktitle = {Energypath 2013: Our Global Sustainable Energy Future},
abstract = {As distributed renewable generation sources continue to be integrated into the power grid, the concept of Microgrids has gained traction. Here, the integration challenge is not just in the control of an individual Microgrid but also in their coordination. This short communication presents a novel approach to inter-Microgrid coordination and control based upon Multi-Agent systems. An architecture based upon physical agents is presented and is implemented on a dual platform of JADE (environment for developing agents) and Matlab-Matpower (power system analysis tool). The implementation is demonstrated for a reconfiguration scenario involving the preservation of vital loads. The work presents many opportunities for future developments in the domain of resilient self-healing power grids.},
keywords = {intelligent systems, Modelling; sizing and control of smart grids, Physical Systems Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
Hussein M Abdelhalim; Amro M Farid; Ambrose A Adegbege; Kamal Youcef-Toumi
Transient Stability of Power Systems with Different Configurations for Wind Power Integration Proceedings Article
In: Innovative Smart Grid Technologies (ISGT), 2013 IEEE PES, 2013.
Abstract | Links | BibTeX | Tags: intelligent systems, Modelling; sizing and control of smart grids, Physical Systems Modeling, Simulation
@inproceedings{MRL_SG_Wind_Integration_Stability,
title = {Transient Stability of Power Systems with Different Configurations for Wind Power Integration},
author = {Hussein M Abdelhalim and Amro M Farid and Ambrose A Adegbege and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=6497903&isnumber=6497783&tag=1},
doi = {10.1109/ISGT.2013.6497903},
year = {2013},
date = {2013-01-01},
booktitle = {Innovative Smart Grid Technologies (ISGT), 2013 IEEE PES},
abstract = {Previous transient stability studies investigating the effects of wind power integration into a conventional power system assume the insertion point of the wind-generating units to be at the same bus and interconnection voltage as the synchronous generators they are substituting or complementing. While these assumptions offer some insights into the effects of the wind on the existing system, important points about the physical distance and interconnection voltage of wind farms with respect to the conventional power system are neglected. This paper analyzes the effects of integrating doubly-fed induction wind turbine generators through different transmission line configurations and at different buses. The IEEE 14-bus test system is used in order to compare results with previous works. Results show that connecting wind generators through transmission lines and to different buses introducesdelays in the speed dynamic responses of existing synchronous generators. These delays in turn affect the bus voltage oscillations. Results also show that there is no significant effect on the base cases when using different interconnection voltages to connect the wind. The results of this study can be used by power system operators when deciding how to connect wind farms to an existing power network when optimizing for stability response to a large fault. Overall, wind farms should be connected through additional transmission lines to buses near where synchronous generators are located and further away from loads and higher risk fault areas.},
keywords = {intelligent systems, Modelling; sizing and control of smart grids, Physical Systems Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
2012
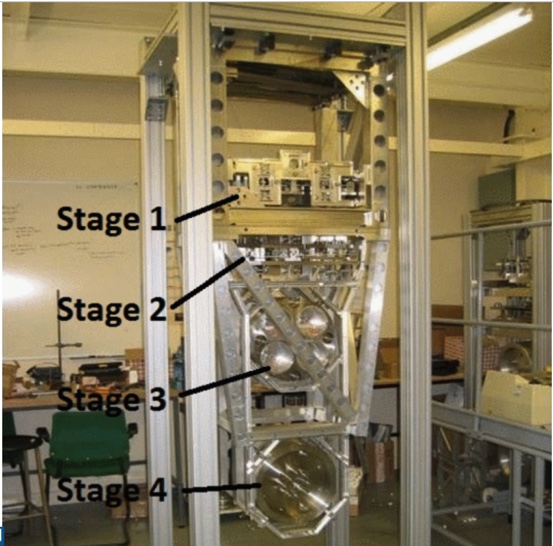
Brett Shapiro; Nergis Mavalvala; Kamal Youcef-Toumi
Modal damping of a quadruple pendulum for advanced gravitational wave detectors Proceedings Article
In: 2012 American Control Conference (ACC), pp. 1017-1022, ACC ACC, 2012, ISBN: 978-1-4577-1096-4.
Abstract | Links | BibTeX | Tags: Control Theory, Data-driven learning for intelligent machine maintanence, Experimentation, Fabrication, intelligent systems, Physical System Modeling, Simulation
@inproceedings{MRL_DDL_Gravity_Wave_Detectors,
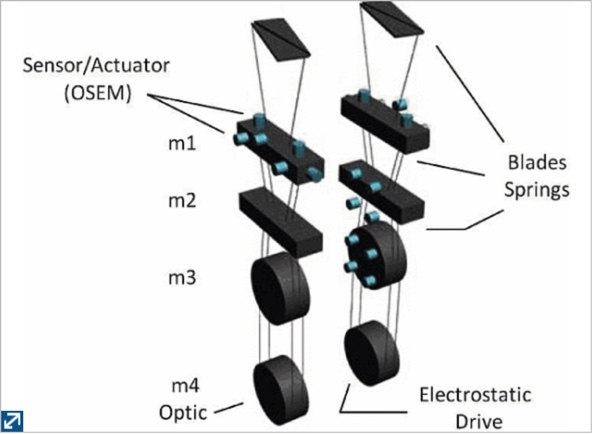
title = {Modal damping of a quadruple pendulum for advanced gravitational wave detectors},
author = {Brett Shapiro and Nergis Mavalvala and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/6315185},
doi = {10.1109/ACC.2012.6315185},
isbn = {978-1-4577-1096-4},
year = {2012},
date = {2012-10-02},
booktitle = {2012 American Control Conference (ACC)},
pages = {1017-1022},
publisher = {ACC},
organization = {ACC},
abstract = {The Laser Interferometer Gravitational-Wave Observatory (LIGO) has begun a major set of upgrades to reach a sensitivity better than 10-19 m/√(Hz) in the 10Hz to 10 kHz frequency band. This advance is expected to bring gravitational wave observations of relativistic astrophysical events such as black hole mergers and supernovae into the realm of regular astronomy. These upgrades require complex vibration isolation systems to better decouple the test masses from ground disturbances. These high performance systems require correspondingly more complex and aggressive active control loops to meet the increased demand in instrument sensitivity. This paper applies a modal damping technique with state estimation to optimize the trade-off between disturbance rejection and sensor noise amplification. The state estimator design applies a customized cost function around the Linear Quadratic Regulator (LQR) algorithm.},
keywords = {Control Theory, Data-driven learning for intelligent machine maintanence, Experimentation, Fabrication, intelligent systems, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
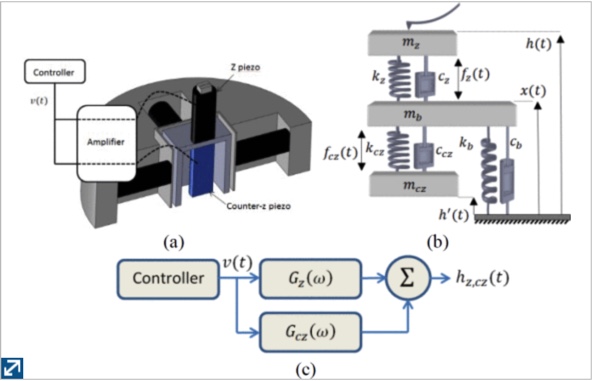
Soltani I Bozchalooi; Kamal Youcef-Toumi; D J Burns; Georg E Fantner
A vibration suppression approach to high-speed atomic force microscopy Proceedings Article
In: 2012 American Control Conference (ACC), pp. 3797-3802, ACC ACC, 2012, ISBN: 978-1-4577-1096-4.
Abstract | Links | BibTeX | Tags: Control Theory, Experimentation, Instrumentation, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation, Visualization
@inproceedings{MRL_AFM_Vibration_Suppression,
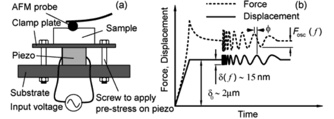
title = {A vibration suppression approach to high-speed atomic force microscopy},
author = {Soltani I Bozchalooi and Kamal Youcef-Toumi and D J Burns and Georg E Fantner},
url = {https://ieeexplore.ieee.org/document/6315281},
doi = {10.1109/ACC.2012.6315281},
isbn = {978-1-4577-1096-4},
year = {2012},
date = {2012-10-02},
booktitle = {2012 American Control Conference (ACC)},
pages = {3797-3802},
publisher = {ACC},
organization = {ACC},
abstract = {The possibility of many new applications and novel scientific observations can be provided by efficient and reliable high-speed atomic force microscopy techniques. However, the reliability of the AFM images decreases significantly as the imaging speed is increased to levels required for the targeted real-time observation of nano-scale phenomenon. One of the main reasons behind this limitation is the excitation of the AFM dynamics at high scan speeds. In this research we propose a piezo based, feedforward controlled, counter actuation mechanism to compensate for the excited out-of-plane scanner dynamics. For this purpose the AFM controller output is properly filtered via a linear compensator and then applied to a counter actuating piezo. The information required for compensator design is extracted from the cantilever deflection signal hence, eliminating the need for any additional sensors. The proposed approach is implemented and experimentally evaluated on the dynamic response of a custom made AFM. It is further assessed by comparing the imaging performance of the AFM with and without the application of the proposed technique and in comparison with the conventional counterbalancing methodology. The experimental results substantiate the effectiveness of the method in significantly improving the imaging performance of AFM at high scan speeds.},
keywords = {Control Theory, Experimentation, Instrumentation, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
Atia E Khalifa; Rached Ben-Mansour; Kamal Youcef-Toumi; Changrak Choi
Characterization of In-Pipe Acoustic Wave for Water Leak Detection Proceedings Article
In: ASME 2011 International Mechanical Engineering Congress and Exposition, pp. 995-1000, ACC ACC, 2012, ISBN: 978-0-7918-5494-5.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Acoustic_Wave_Pipe_Leakage,
title = {Characterization of In-Pipe Acoustic Wave for Water Leak Detection},
author = {Atia E Khalifa and Rached Ben-Mansour and Kamal Youcef-Toumi and Changrak Choi},
url = {https://asmedigitalcollection.asme.org/IMECE/proceedings/IMECE2011/54945/995/355499},
doi = {10.1115/IMECE2011-62333},
isbn = {978-0-7918-5494-5},
year = {2012},
date = {2012-08-01},
booktitle = {ASME 2011 International Mechanical Engineering Congress and Exposition},
pages = {995-1000},
publisher = {ACC},
organization = {ACC},
abstract = {This paper presents experimental observations on the characteristics of the acoustic signal propagation and attenuation inside water-filled pipes. An acoustic source (exciter) is mounted on the internal pipe wall, at a fixed location, and produces a tonal sound to simulate a leak noise with controlled frequency and amplitude, under different flow conditions. A hydrophone is aligned with the pipe centerline and can be re-positioned to capture the acoustic signal at different locations. Results showed that the wave attenuation depends on the source frequency and the line pressure. High frequency signals get attenuated more with increasing distance from the source. The optimum location to place the hydrophone for capturing the acoustic signal is not at the vicinity of source location. The optimum location also depends on the frequency and line pressure. It was also observed that the attenuation of the acoustic waves is higher in more flexible pipes like PVC ones.},
keywords = {Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
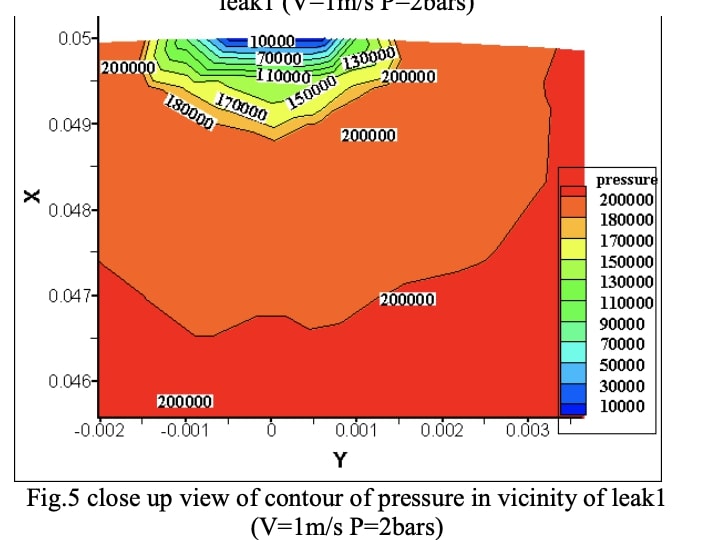
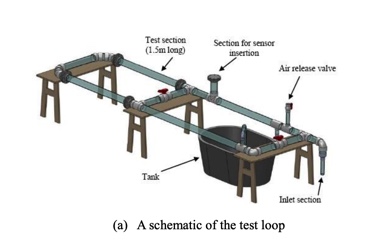
Rached Ben-Mansour; Kabir Suara; Kamal Youcef-Toumi
Determination of important flow characteristics for leak detection in water pipelines-networks Journal Article
In: Computational Thermal Sciences, vol. 5, pp. 143-151, 2012, ISSN: 143-151.
Abstract | Links | BibTeX | Tags: Control Theory, Inspection, Physical System Modeling, repair & intelligence for water distribution pipes, Robotics & Automation, Simulation
@article{MRL_AFM_Flow_Leak_Detection,
title = {Determination of important flow characteristics for leak detection in water pipelines-networks},
author = {Rached Ben-Mansour and Kabir Suara and Kamal Youcef-Toumi},
url = {http://www.dl.begellhouse.com/journals/648192910890cd0e,1c6ade0932d1248e,18dcce9156c09e65.html},
doi = {10.1615/ComputThermalScien.2013006301},
issn = {143-151},
year = {2012},
date = {2012-07-16},
journal = {Computational Thermal Sciences},
volume = {5},
pages = {143-151},
publisher = {begellhouse},
abstract = {The accuracy of a leak detection method depends greatly on the flow and leak parameters in a given pipeline. This paper gives some insight into the flow characteristics around simulated small leaks. The present computational fluid dynamics (CFD) studies have indicated clear distinctive features in fluid pressure and fluid acceleration that can be used for the early detection of small leaks (<1 of the total flow) in water distribution pipelines. The present CFD simulations based on a steady state standard к − ε turbulent flow model are carried out for different pressure lines in 4 in. (100 m) ID pipe. Based on these simulations, it has been found out that the pressure gradients in the vicinity of the leaks are quite large, hence a leak detection method based on pressure gradient measurement is proposed. In addition, these simulations have shown remarkable gradients in the axial flow acceleration along the centerline of the pipe. These discovered flow features can offer another leak detection method based on the use of accelerometers.},
keywords = {Control Theory, Inspection, Physical System Modeling, repair & intelligence for water distribution pipes, Robotics & Automation, Simulation},
pubstate = {published},
tppubtype = {article}
}
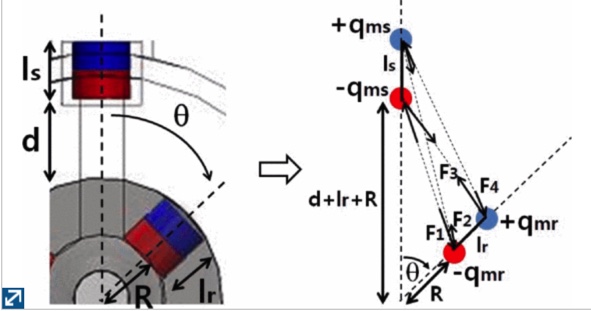
C Choi; D Chatzigeorgiou; R Ben-Mansour; K Youcef-Toumi
Design and analysis of novel friction controlling mechanism with minimal energy for in-pipe robot applications Proceedings Article
In: 2012 IEEE International Conference on Robotics and Automation, pp. 4118-4123, IEEE IEEE, 2012, ISBN: 978-1-4673-1405-3.
Abstract | Links | BibTeX | Tags: Experimentation, Fabrication, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics and Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Friction_Minimization,
title = {Design and analysis of novel friction controlling mechanism with minimal energy for in-pipe robot applications},
author = {C Choi and D Chatzigeorgiou and R Ben-Mansour and K Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/6225380},
doi = {10.1109/ICRA.2012.6225380},
isbn = {978-1-4673-1405-3},
year = {2012},
date = {2012-06-28},
booktitle = {2012 IEEE International Conference on Robotics and Automation},
pages = {4118-4123},
publisher = {IEEE},
organization = {IEEE},
abstract = {In-pipe wheeled robots require friction on the wheels to maintain traction. Ability to vary this friction is highly desirable but conventionally used linkage mechanism is not suitable for it. This paper presents a novel mechanism generating adjustable friction with minimal energy consumption for in-pipe robots. The mechanism uses permanent magnets to achieve the objective. An appropriate model for the system is also presented and discussed. The paper identifies the important design parameters, and more importantly establishes the relation between the design parameters and the system's performance. In addition, a prototype of the mechanism was designed, fabricated and tested for validation.},
keywords = {Experimentation, Fabrication, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics and Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
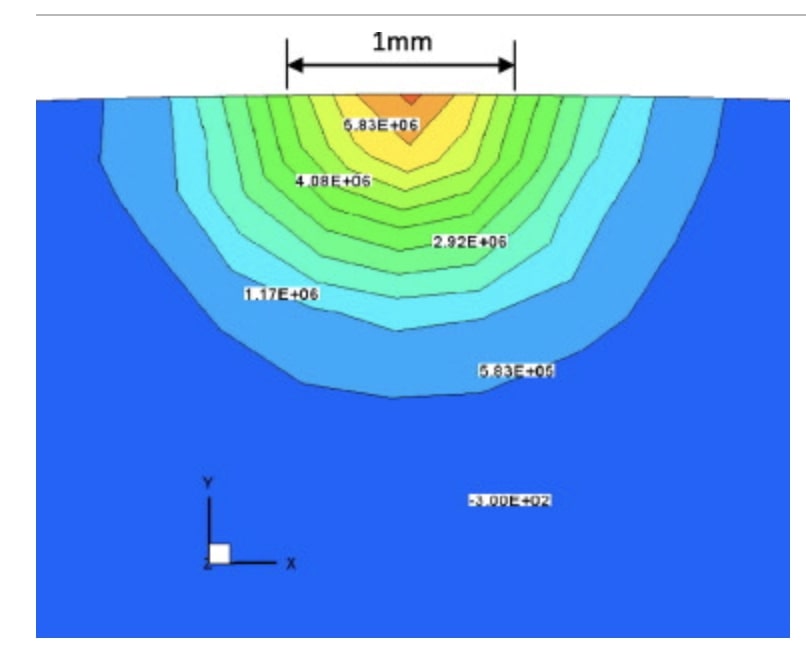
Dimitris M Chatzigeorgiou; Atia E Khalifa; Kamal Youcef-Toumi; Rached Ben-Mansour
An In-Pipe Leak Detection Sensor: Sensing Capabilities and Evaluation Proceedings Article
In: ASME 2011 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, pp. 481-489, ACC ACC, 2012, ISBN: 978-0-7918-5480-8.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Leak_Capability_Sensor,
title = {An In-Pipe Leak Detection Sensor: Sensing Capabilities and Evaluation},
author = {Dimitris M Chatzigeorgiou and Atia E Khalifa and Kamal Youcef-Toumi and Rached Ben-Mansour},
url = {https://asmedigitalcollection.asme.org/IDETC-CIE/proceedings/IDETC-CIE2011/54808/481/351961},
doi = {10.1115/DETC2011-48411},
isbn = {978-0-7918-5480-8},
year = {2012},
date = {2012-06-12},
booktitle = {ASME 2011 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference},
pages = {481-489},
publisher = {ACC},
organization = {ACC},
abstract = {In most cases the deleterious effects associated with the occurrence of leak may present serious problems and therefore leaks must be quickly detected, located and repaired. The problem of leakage becomes even more serious when it is concerned with the vital supply of fresh water to the community. In addition to waste of resources, contaminants may infiltrate into the water supply. The possibility of environmental health disasters due to delay in detection of water pipeline leaks has spurred research into the development of methods for pipeline leak and contamination detection. Leaks in water pipes create acoustic emissions, which can be sensed to identify and localize leaks. Leak noise correlators and listening devices have been reported in the literature as successful approaches to leak detection but they have practical limitations in terms of cost, sensitivity, reliability and scalability. To overcome those limitations the development of an in-pipe traveling leak detection system is proposed. The development of such a system requires a clear understanding of acoustic signals generated from leaks and the study of the variation of those signals with different pipe loading conditions, leak sizes and surrounding media. This paper discusses those signals and evaluates the merits of an in-pipe-floating sensor.},
keywords = {Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
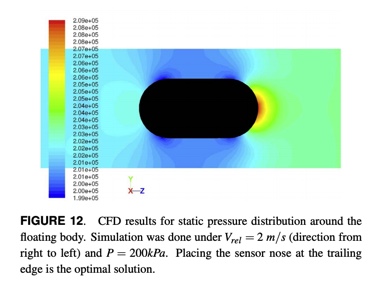
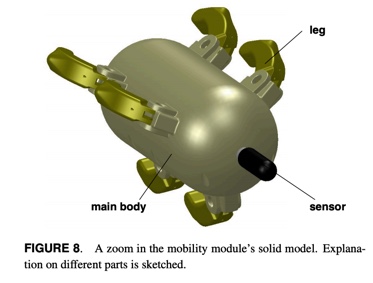
Dimitris M Chatzigeorgiou; Kamal Youcef-Toumi; Atia E Khalifa; Rached Ben-Mansour
Analysis and Design of an In-Pipe System for Water Leak Detection Proceedings Article
In: ASME 2011 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, pp. 1007-1016, ASME ASME, 2012, ISBN: 978-0-7918-5482-2.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Design_Water_Leak_Detection,
title = {Analysis and Design of an In-Pipe System for Water Leak Detection},
author = {Dimitris M Chatzigeorgiou and Kamal Youcef-Toumi and Atia E Khalifa and Rached Ben-Mansour},
url = {https://asmedigitalcollection.asme.org/IDETC-CIE/proceedings/IDETC-CIE2011/54822/1007/353866},
doi = {10.1115/DETC2011-48395},
isbn = {978-0-7918-5482-2},
year = {2012},
date = {2012-06-12},
booktitle = {ASME 2011 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference},
pages = {1007-1016},
publisher = {ASME},
organization = {ASME},
abstract = {In most cases the deleterious effects associated with the occurrence of leaks may present serious problems and therefore, leaks must be quickly detected, located and repaired. The problem of leakage becomes even more serious when it is concerned with the vital supply of fresh water to the community. In addition to waste of resources, contaminants may infiltrate into the water supply. The possibility of environmental health disasters due to delay in detection of water pipeline leaks has spurred research into the development of methods for pipeline leak and contamination detection. Leaking in water networks has been a very significant problem worldwide, especially in developing countries, where water is sparse. Many different techniques have been developed to detect leaks, either from the inside or from the outside of the pipe; each one of them with their advantages, complexities but also limitations. To overcome those limitations we focus our work on the development of an in-pipe-floating sensor. The present paper discusses the design considerations of a novel autonomous system for in-pipe water leak detection. The system is carefully designed to be minimally invasive to the flow within the pipe and thus not to affect the delicate leak signal. One of its characteristics is the controllable motion inside the pipe. The system is capable of pinpointing leaks in pipes while operating in real network conditions, i.e. pressurized pipes and high water flow rates, which are major challenges.},
keywords = {Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
R Ben-Mansour; M A Habib; A Khalifa; K Youcef-Toumi; D Chatzigeorgiou
Computational fluid dynamic simulation of small leaks in water pipelines for direct leak pressure transduction Journal Article
In: Computers & Fluids, vol. 57, pp. 110-123, 2012, ISSN: 0045-7930.
Abstract | Links | BibTeX | Tags: Control Theory, Inspection, Physical System Modeling, repair & intelligence for water distribution pipes, Robotics & Automation, Simulation
@article{MRL_AFM_Dynamic_Simulation_Leak_Pipe,
title = {Computational fluid dynamic simulation of small leaks in water pipelines for direct leak pressure transduction},
author = {R Ben-Mansour and M A Habib and A Khalifa and K Youcef-Toumi and D Chatzigeorgiou},
url = {https://www.sciencedirect.com/science/article/pii/S0045793011003884},
doi = {https://doi.org/10.1016/j.compfluid.2011.12.016},
issn = {0045-7930},
year = {2012},
date = {2012-03-30},
journal = {Computers & Fluids},
volume = {57},
pages = {110-123},
publisher = {Science Direct},
abstract = {Computational fluid dynamic simulation of small leaks in a pipe having 0.1m diameter has been performed under realistic velocities and pressures using a 3D turbulent flow model of well tested CFD code. The steady state simulations have shown clear signature in the pressure and pressure gradient variations along the pipe. For very small leaks (below 1l/min), this signature in not very strong in the pressure variation, but very clear in the pressure gradient. The averaged power spectral density (PSD) as well as FFT of the pressure fluctuations based on transient Detached Eddy Simulations (DESs) are presented for different locations around the leak position. These results show that the presence of a leak causes measurable differences in the magnitude and frequency of the pressure signal spectrum and also in the averaged PSD for the range of 220–500Hz frequency.},
keywords = {Control Theory, Inspection, Physical System Modeling, repair & intelligence for water distribution pipes, Robotics & Automation, Simulation},
pubstate = {published},
tppubtype = {article}
}
2011
Vijay Shilpiekandula; Kamal Youcef-Toumi
Integrated Design and Control of Flexure-Based Nanopositioning Systems — Part I: Methodology Proceedings Article
In: pp. 9406-9412, IFAC, 2011, ISSN: 1474-6670, (18th IFAC World Congress).
Abstract | Links | BibTeX | Tags: Control Theory, Mechatronic Design, Nanotechnology, Physical System Modeling, Robot operated modular fixtures, Simulation
@inproceedings{MRL_AFM_Flexure_Nanopositioning_Methodology,
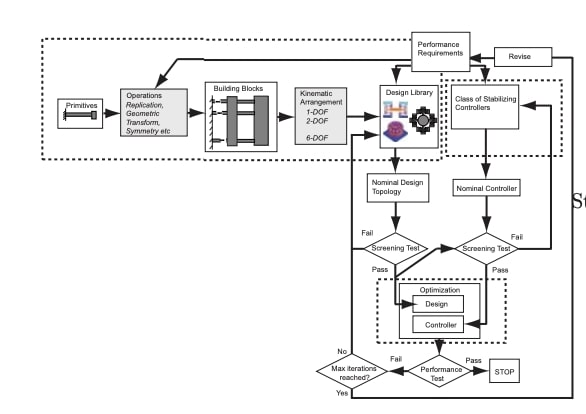
title = {Integrated Design and Control of Flexure-Based Nanopositioning Systems — Part I: Methodology},
author = {Vijay Shilpiekandula and Kamal Youcef-Toumi},
url = {https://www.sciencedirect.com/science/article/pii/S1474667016451232},
doi = {https://doi.org/10.3182/20110828-6-IT-1002.03796},
issn = {1474-6670},
year = {2011},
date = {2011-09-01},
journal = {IFAC Proceedings Volumes},
volume = {44},
number = {1},
pages = {9406-9412},
publisher = {IFAC},
abstract = {Abstract
Flexure-based mechanisms, also referred to as flexures, are widely being used as motion-guidance, or bearing, elements in applications requiring multi-degree-of-freedom positioning and alignment. Unlike friction-bearings (such as sliding or rolling contact bearings), flexures can be designed to offer, to a large extent, reliable linear elastic motion with a high resolution (on the order of nanometers) over small ranges of motion (on order of micrometers). Example applications include positioning a probe or sample in atomic force microscopy, alignment of tool and sample in stamping processes, and fine-positioning of wafers and masks in semiconductor manufacturing. These applications are often required satisfy critical functional requirements, such as load-capacity, bandwidth, resolution, and range. A systematic approach is needed to simultaneously address the design and control challenges involved, starting from the initial design concept generation stage to the final control implementation and testing. In this paper, we present an integrated design and control method for implementing flexure-based nanopositioning systems. We discuss the need for varying design topology and order of a controller in design and control optimization. An automation engine generates a set of flexure-based design topologies and also controllers of varying order in the optimization. A simple 1-DOF example is worked out to illustrate the steps involved in using this methodology. The outcome of the exercise is a novel design topology, with it shape and size optimized, and a controller synthesized such that a desired control bandwidth and design requirements of strength and modal separation are met.},
note = {18th IFAC World Congress},
keywords = {Control Theory, Mechatronic Design, Nanotechnology, Physical System Modeling, Robot operated modular fixtures, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
Flexure-based mechanisms, also referred to as flexures, are widely being used as motion-guidance, or bearing, elements in applications requiring multi-degree-of-freedom positioning and alignment. Unlike friction-bearings (such as sliding or rolling contact bearings), flexures can be designed to offer, to a large extent, reliable linear elastic motion with a high resolution (on the order of nanometers) over small ranges of motion (on order of micrometers). Example applications include positioning a probe or sample in atomic force microscopy, alignment of tool and sample in stamping processes, and fine-positioning of wafers and masks in semiconductor manufacturing. These applications are often required satisfy critical functional requirements, such as load-capacity, bandwidth, resolution, and range. A systematic approach is needed to simultaneously address the design and control challenges involved, starting from the initial design concept generation stage to the final control implementation and testing. In this paper, we present an integrated design and control method for implementing flexure-based nanopositioning systems. We discuss the need for varying design topology and order of a controller in design and control optimization. An automation engine generates a set of flexure-based design topologies and also controllers of varying order in the optimization. A simple 1-DOF example is worked out to illustrate the steps involved in using this methodology. The outcome of the exercise is a novel design topology, with it shape and size optimized, and a controller synthesized such that a desired control bandwidth and design requirements of strength and modal separation are met.
Brett Shapiro; Nergis Mavalvala; Kamal Youcef-Toumi
Actuator sizing of a quadruple pendulum for advanced gravitational wave detectors Proceedings Article
In: Proceedings of the 2011 American Control Conference, pp. 1358-1363, ACC ACC, 2011, ISBN: 978-1-4577-0081-1.
Abstract | Links | BibTeX | Tags: Control Theory, Data-driven learning for intelligent machine maintanence, Experimentation, Fabrication, intelligent systems, Physical System Modeling, Simulation
@inproceedings{MRL_DDL_Actuator_Sizing_Pendulum,
title = {Actuator sizing of a quadruple pendulum for advanced gravitational wave detectors},
author = {Brett Shapiro and Nergis Mavalvala and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/5991170},
doi = {10.1109/ACC.2011.5991170},
isbn = {978-1-4577-0081-1},
year = {2011},
date = {2011-08-18},
booktitle = {Proceedings of the 2011 American Control Conference},
pages = {1358-1363},
publisher = {ACC},
organization = {ACC},
abstract = {The Laser Interferometer Gravitational-Wave Observatory (LIGO) has begun a major set of upgrades to reach a sensitivity better than 10-19 m/√(Hz) in the 10 Hz to 10 kHz frequency band. This advance is expected to bring gravitational wave observations of relativistic astrophysical events such as black hole mergers and supernovae into the realm of regular astronomy. These upgrades require complex vibration isolation systems to better decouple the test masses from ground disturbances. These high performance systems require correspondingly more complex and aggressive active control loops to meet the increased demand in instrument sensitivity. Appropriately sized actuators are essential to achieving the necessary control performance while limiting the cost, noise, and complexity associated with larger actuators. This paper applies the plant's pseudoinverse transfer function to analyze the least squares dynamic range required by the actuators to reject the stochastic disturbances exciting the Advanced LIGO quadruple pendulum isolation systems.},
keywords = {Control Theory, Data-driven learning for intelligent machine maintanence, Experimentation, Fabrication, intelligent systems, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
Tavakoli H Nia; L Han; Y Li; Soltani I Bozchalooi; H Hung; E Frank; K Youcef-Toumi; A Grodzinsky; C Orti
The effect of GAG depletion on cartilage nanoscale hydraulic permeability Proceedings Article
In: ORS 2012 Annual Meeting, pp. 0282, ORS ORS, 2011, ISBN: 978-1-4577-1096-4.
Abstract | Links | BibTeX | Tags: Control Theory, Instrumentation, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation
@inproceedings{MRL_AFM_GAG_Depletion,
title = {The effect of GAG depletion on cartilage nanoscale hydraulic permeability},
author = {Tavakoli H Nia and L Han and Y Li and Soltani I Bozchalooi and H Hung and E Frank and K Youcef-Toumi and A Grodzinsky and C Orti},
url = {http://www.ors.org/Transactions/58/0282.pdf},
doi = {10.1109/ACC.2012.6315281},
isbn = {978-1-4577-1096-4},
year = {2011},
date = {2011-01-01},
booktitle = {ORS 2012 Annual Meeting},
pages = {0282},
publisher = {ORS},
organization = {ORS},
abstract = {The advent of new time-dependent nanomechanical methods has recently enabled the quantification of cartilage tissue poroelasticity and hydraulic permeability, k, at the nanoscale [1-3] and holds great potential for early detection of pathological changes and diagnosis of osteoarthritis (OA). It is known that at the macroscale, tissue hydraulic permeability can undergo several order-of-magnitude changes due to OA [4] while the equilibrium stiffness may vary by only a factor of 2 [5]. This is because GAG chains are the main determinant of the pore size (consequently, hydraulic permeability) of cartilage while they contribute only partially to the compression stiffness of the tissue. Here, we extend the technique of atomic force microscope-based dynamic oscillatory nanoindentation to a larger frequency range (1-10,000 Hz) and compare these data to finite element analysis simulations to study the effect of GAG content, relevant to early stage OA.},
keywords = {Control Theory, Instrumentation, Nanoscale video imaging for dynamic process visualization, Nanotechnology, Physical System Modeling, Simulation},
pubstate = {published},
tppubtype = {inproceedings}
}
2010
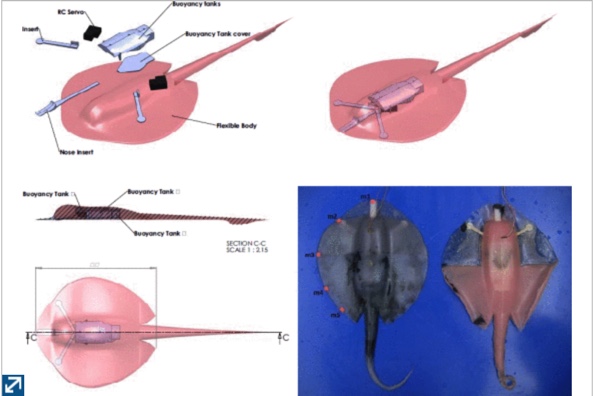
Pablo Valdivia y Alvarado; Stephanie Chin; Winston Larson; Anirban Mazumdar; Kamal Youcef-Toumi
A soft body under-actuated approach to multi degree of freedom biomimetic robots: A stingray example Proceedings Article
In: 2010 3rd IEEE RAS EMBS International Conference on Biomedical Robotics and Biomechatronics, pp. 473-478, IEEE IEEE, 2010, ISBN: 978-1-4244-7709-8.
Abstract | Links | BibTeX | Tags: Biomimetic robotic fish for underwater monitoring, Experimentation, Mechatronic Design, Physical System Modeling, Robotics and Automation, Simulation, Visualization
@inproceedings{MRL_BRF_Multi_DOF_Stingray,
title = {A soft body under-actuated approach to multi degree of freedom biomimetic robots: A stingray example},
author = {Pablo Valdivia y Alvarado and Stephanie Chin and Winston Larson and Anirban Mazumdar and Kamal Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/5627803},
doi = {10.1109/BIOROB.2010.5627803},
isbn = {978-1-4244-7709-8},
year = {2010},
date = {2010-11-11},
booktitle = {2010 3rd IEEE RAS EMBS International Conference on Biomedical Robotics and Biomechatronics},
pages = {473-478},
publisher = {IEEE},
organization = {IEEE},
abstract = {In this paper we present a new application of the methodology our group is developing to design and prototype under-actuated biomimetic robots by determining appropriate body material property distributions. When excited, flexible bodies with proper anisotropic material distributions display modes of vibration that mimic required locomotion kinematics and require minimal actuation. Our previous prototypes explored simple two dimensional applications for fish-like swimming. In this paper, the three dimensional vibrational kinematics of a stingray are explored. A simple design is explained, and corresponding prototypes are presented along with preliminary performance data. Our methodology shows great promise to develop simple, robust, and inexpensive mobile robots that can efficiently accomplish locomotion.},
keywords = {Biomimetic robotic fish for underwater monitoring, Experimentation, Mechatronic Design, Physical System Modeling, Robotics and Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
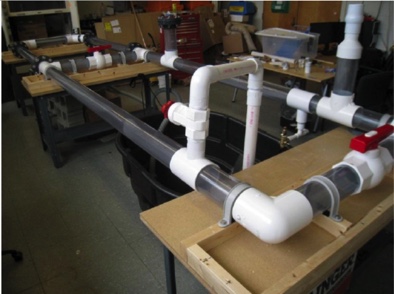
Dimitris M Chatzigeorgiou; Sumeet Kumar; Atia E Khalifa; Ajay Deshpande; Kamal Youcef-Toumi; Sanjay Sarma; Rached Ben-Mansour
In-pipe Acoustic Characterization of Leak Signals in Plastic Water-filled Pipes Proceedings Article
In: AWWA Annual Conference and Exposition (ACE) 2010, AWWA AWWA, 2010.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization
@inproceedings{MRL_WDP_Acoustic_Leak_Signals,
title = {In-pipe Acoustic Characterization of Leak Signals in Plastic Water-filled Pipes},
author = {Dimitris M Chatzigeorgiou and Sumeet Kumar and Atia E Khalifa and Ajay Deshpande and Kamal Youcef-Toumi and Sanjay Sarma and Rached Ben-Mansour},
url = {https://www.researchgate.net/publication/277303127_In-pipe_Acoustic_Characterization_of_Leak_Signals_in_Plastic_Water-filled_Pipes},
year = {2010},
date = {2010-01-01},
booktitle = {AWWA Annual Conference and Exposition (ACE) 2010},
publisher = {AWWA},
organization = {AWWA},
abstract = {Acoustic emissions can be sensed to identify and localize leaks in water pipes. Leak noise correlators and listening devices have been reported in literature as successful approaches to leak detection but they have practical limitations in terms of cost, sensitivity, reliability and scalability. A possible efficient solution is the development of an in-pipe traveling leak detection system. It has been reported that in-pipe sensing is more accurate and efficient since the sensing element can be very close to the sound source. Currently in-pipe approaches are limited to large leaks and larger diameter pipes. Development of such a system requires clear understanding of acoustic signals generated from leaks and their variation with different pipe loading conditions, leak sizes and surrounding media. This paper discusses the acoustic characterization of leak signals in controlled environments. A lab experimental setup was designed and built in which measurements were taken from inside 4 inch PVC water pipes using a hydrophone. Signals were collected for a wide range of conditions: different pressures and leak flow rates to better understand the leak signal signatures. Experiments were conducted with different pipe connecting elements like valves and junctions, and different external conditions such as pipes placed in water, air and soil. Signals were collected at various distances from the leak location (upstream and downstream) to understand the opportunities of spatial cross-correlation techniques in localizing leaks and the effect of sensor position on the signal. Characterizations of different datasets are presented in frequency domain. The implications of acoustic characterization on the design of algorithms for leak detection are discussed and a simple algorithm to decide whether or not a leak is present near the sensor location is proposed, based on signal power calculations. The characterization gives insights, which will pave ways for the development of smart, autonomous pipe-traversing systems capable of detecting and localizing leaks on a city level water distribution network.},
keywords = {Algorithms, Computational Intelligence, Inspection; repair and intelligence for water distribution pipes, Physical System Modeling, Robotics & Automation, Simulation, Visualization},
pubstate = {published},
tppubtype = {inproceedings}
}
1979
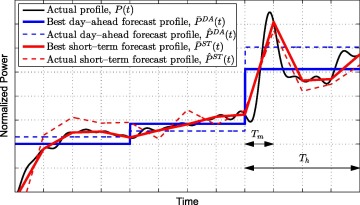
Aramazd Muzhikyan; Amro M Farid; Kamal Youcef-Toumi
An a priori analytical method for the determination of operating reserve requirements Journal Article
In: International Journal of Electrical Power & Energy Systems, vol. 86, pp. 1-17, 1979, ISSN: 0142-0615.
Abstract | Links | BibTeX | Tags: Algorithms, Computational Intelligence, intelligent systems, Physical System Modeling, Simulation, Uncertainty estimation and calibration for modeling
@article{MRL_AFM_Priori_Operating_Requirements,
title = {An a priori analytical method for the determination of operating reserve requirements},
author = {Aramazd Muzhikyan and Amro M Farid and Kamal Youcef-Toumi},
url = {https://www.sciencedirect.com/science/article/pii/S0142061515300089},
doi = {https://doi.org/10.1016/j.ijepes.2016.09.005},
issn = {0142-0615},
year = {1979},
date = {1979-04-01},
journal = {International Journal of Electrical Power & Energy Systems},
volume = {86},
pages = {1-17},
publisher = {ScienceDirect},
abstract = {Power balance is one of the key requirements for reliable power system operation. However, factors, such as net load variability and forecast errors, impose practical limitations on matching the scheduled generation and the real-time demand. Normally, potential power imbalances are mitigated by scheduling additional generation capacity called operating reserves. However, reserves are a costly commodity and their requirements should be accurately assessed to avoid unnecessary expense. Currently, the reserve requirements are determined using a posteriori methods based upon operator’s experience and established assumptions. While these assumptions are made out of a level of engineering practicality, they may not be formally true given the numerical evidence. This paper presents a formal mathematical framework for the a priori determination of three types of operating reserve requirements, namely load following, ramping and regulation. Validation of the methodology is performed by a set of extensive simulations that model the power system operations for different scenarios. This methodology is used to study the sensitivity of each type of reserve requirement to the net load and power system parameters.},
keywords = {Algorithms, Computational Intelligence, intelligent systems, Physical System Modeling, Simulation, Uncertainty estimation and calibration for modeling},
pubstate = {published},
tppubtype = {article}
}
0000
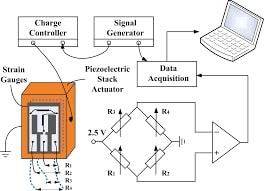
C Yang; C Li; F Xia; Y Zhu; J Zhao; K Youcef-Toumi
Charge Controller With Decoupled and Self-Compensating Configurations for Linear Operation of Piezoelectric Actuators in a Wide Bandwidth Journal Article
In: IEEE Transactions on Industrial Electronics, vol. 66, no. 7, pp. 5392-5402, 0000, ISSN: 1557-9948.
Abstract | Links | BibTeX | Tags: Control Theory, Instrumentation, Nanotechnology, Physical System Modeling, Robot operated modular fixtures, Visualization
@article{MRL_AFM_Charge_Controller_Compensating_Configs,
title = {Charge Controller With Decoupled and Self-Compensating Configurations for Linear Operation of Piezoelectric Actuators in a Wide Bandwidth},
author = {C Yang and C Li and F Xia and Y Zhu and J Zhao and K Youcef-Toumi},
url = {https://ieeexplore.ieee.org/document/8466119},
doi = {10.1109/TIE.2018.2868321},
issn = {1557-9948},
journal = {IEEE Transactions on Industrial Electronics},
volume = {66},
number = {7},
pages = {5392-5402},
abstract = {Charge control is a well-known sensorless approach to operate piezoelectric actuators, which has been proposed for more than 30 years. However, it is rarely used in industry because the implemented controllers suffer from the issues of limited low-frequency performance, long settling time, floating-load, and loss of stroke, etc. In this paper, a novel controller circuit dedicated to overcome these issues is presented. In the proposed scheme, a grounded-load charge controller with decoupled configuration is developed, which separates high-frequency and low-frequency paths, thus achieving arbitrarily low transition frequency without increasing the settling time. Based on this, a self-compensating configuration is further proposed and integrated into the controller circuit, which makes full use of controller output to improve its own control performance at low frequencies. Experimental results show that the presented charge controller can effectively reduce more than 88% of the hysteretic nonlinearity even when operating close to the transition frequency. To demonstrate its practical value, we then integrate it into a custom-designed high-speed atomic force microscope system. By comparing images obtained from using voltage drive and charge controller, it is clear that the piezoelectric hysteresis has been significantly reduced in a wide bandwidth.},
keywords = {Control Theory, Instrumentation, Nanotechnology, Physical System Modeling, Robot operated modular fixtures, Visualization},
pubstate = {published},
tppubtype = {article}
}